 机器人视觉抓取问题出现的原因和解决方法
机器人视觉抓取问题出现的原因和解决方法

最近视觉抓件系统一直会出现抓取零件不到位的问题.下面我将分析一下问题出现的原应.
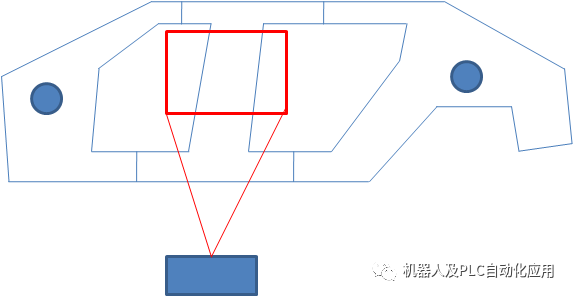
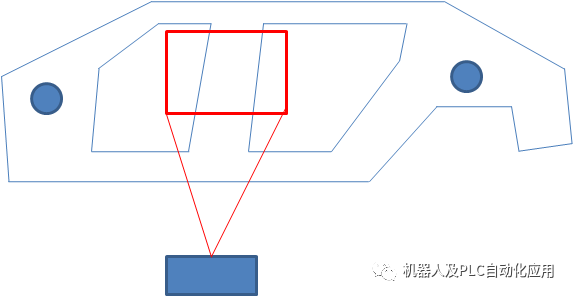
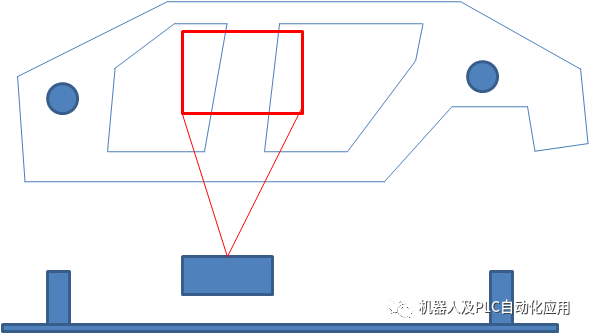
单相机测点,测量车身侧围外板B /内板B,计算出的车身整体偏差值是B柱的旋转和变化量.因此对于车身整体的变化量存在偏差.零件大的组装件容易出现这种问题.因此要区分对待侧围内板和侧围外部的抓取视觉的计算方法.
1.车身侧围内板:
应设置两个相机对应机器人抓手上的定位销附近,计算两个定位空的偏差值.由于机器人抓手是固定的所以,要计算出两空的变化对应车身坐标系的整体变化值.这样计算出的机器人BASE坐标系下的偏差值最准确,机器人的抓取效果最好。
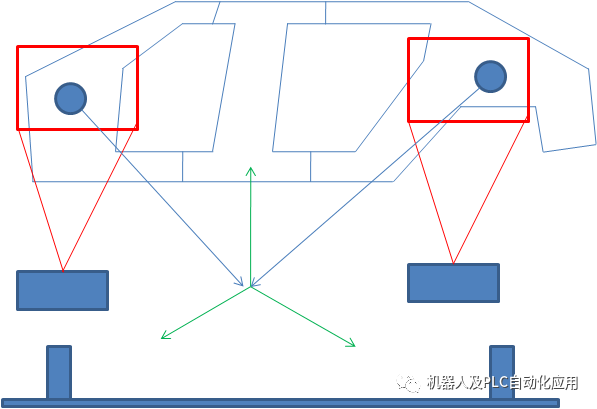
如果机器人抓手不使用定位销定位,则可以使用一个相机的方法进行粗略抓取,问题会很少。
2.车身侧围外板:
侧围外板是一个整体件,用一个相机照车身B柱是没有问题的.整体大件由于不需要搭接工艺,因此可以使用一个相机和定位销定位抓取的方法.
审核编辑:郭婷
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31453浏览量
223678 -
相机
+关注
关注
5文章
1606浏览量
56034
原文标题:机器人视觉抓取问题分析
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
操作”——识别特定物体、主动跟随、近距离抓取。本文将在此基础上,集成深度摄像头,实现机器人核心功能:
使用米尔RK3576 NPU加速MixFormerV2进行目标跟踪,替代传统OpenCV算法
发表于 04-10 21:23
双芯光缆在机器人控制中的应用案例
。 案例一:工业机器人视觉系统的高速图像传输 场景需求: 在汽车制造、电子装配等工业场景中,机器人需通过视觉系统实时识别工件位置、姿态及缺陷,指导机械臂完成高精度操作(如焊接、
3D视觉引导拆码垛:一文读懂“机器眼”如何指挥机器人搬货?
在物流仓库或现代化工厂,你常会看到这样的场景:机械臂精准地伸向堆叠如山的纸箱、料箱,甚至软包,轻松抓取并放到传送带上,整个过程行云流水,无需人工干预。让机器人从“盲人摸象”到“火眼金睛”的秘诀,就是

索尼FCB-EV9500M MIPI输出:机器人视觉系统的革新引擎
在工业自动化与智能服务机器人快速发展的今天,视觉系统已成为机器人感知环境、执行任务的核心组件。索尼FCB-EV9500M作为一款搭载MIPI接口的一体化高清摄像机模组,凭借其卓越的图像质量、低延迟
解锁“试管自动抓取搬运”新纪元:富唯智能复合机器人重塑精准物流
在工业自动化的浪潮中,如何高效、精准地完成如“试管自动抓取搬运”这类高要求的物料处理任务,成为许多行业迈向智能化升级的关键挑战。富唯智能推出的复合机器人解决方案,正以其高度集成、灵活部署与智能控制

如何使用机器人分析仪EtherCAT-Analyzer抓取主从站数据?
EtherCAT总线在机器人控制总线里占据重要地位。这次,我们搭建了包含EtherCAT主从站和分析仪的完整环境,用机器人分析仪EtherCAT-Analyzer实际抓取主从站之间的通讯数据。实测

变焦、高速、高清:索尼FCB-ER9500机芯如何重塑机器人视觉
”,其性能直接影响着机器人的作业精度和效率。索尼FCB-ER9500机芯的出现,为工业机器人带来了全新的视觉解决方案,推动工业检测向更高水平迈进。 01
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
更多"、"互动更流畅"是开发者面临的核心挑战。传统的单一屏幕和有限的视觉输入已成为提升机器人智能化水平的瓶颈。而瑞芯微RK3576高性能处理器的出现
发表于 10-29 16:41
15分钟快速部署,复合机器人如何重塑“上下料机器人哪家好”的行业答案
富唯智能复合机器人突破传统技术边界,将协作机器人、移动机器人及视觉引导技术深度融合。其搭载的ICD系列核心控制器,实现了对整个系统的一体化控制,彻底摆脱多设备协同时的“兼容性焦虑”。无

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
。
同时,磁传感器还是多传感器融合中的 “稳定锚点”。在机器人运动系统的融合定位中,它常作为核心基准。以 “足球机器人” 项目为例,当视觉传感器因强光出现噪点、超声波传感器受声波反
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
部署,详细介绍了基于颜色阈值和深度学习的巡线方法。
二维码识别则广泛应用于机器人定位与任务触发,例如AGV(自动导引车)的路径规划。
深度学习在机器人视觉中的崛起
书中重点介绍了Y
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
地图构建,包括算法原理介绍、安装与配置方法、仿真环境中的SLAM以及真实机器人上的SLAM。
这一过程不仅涉及到计算机视觉和机器人学的知识,还需要对ROS 2的节点管理和数据处理有一定
发表于 04-27 11:42



评论