 基于OpenHarmony的智能金属探测器
基于OpenHarmony的智能金属探测器

一、简介
智能金属探测器是基于 OpenAtom OpenHarmony(以下简称“OpenHarmony”)操作系统,利用电磁感应原理来探测周围的金属物体。该样例采用多设备协同的方式,兼容 OpenHarmony 设备开发与应用开发,整个样例体现了 OpenHarmony 的 NAPI、eTS UI、UI 管理状态 @state 和音频播放等技术特性。
二、运行效果
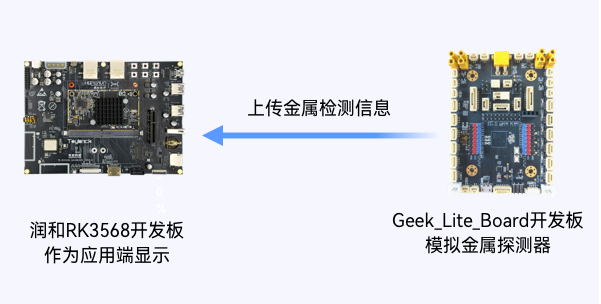
当周围有金属靠近时,设备端蜂鸣器会发出警报并把检测信息通过 Wi-Fi 模组发送给应用端。在应用端收到检测信息之后,会通过屏幕显示检测状态并语音播报检测结果。

三、功能实现
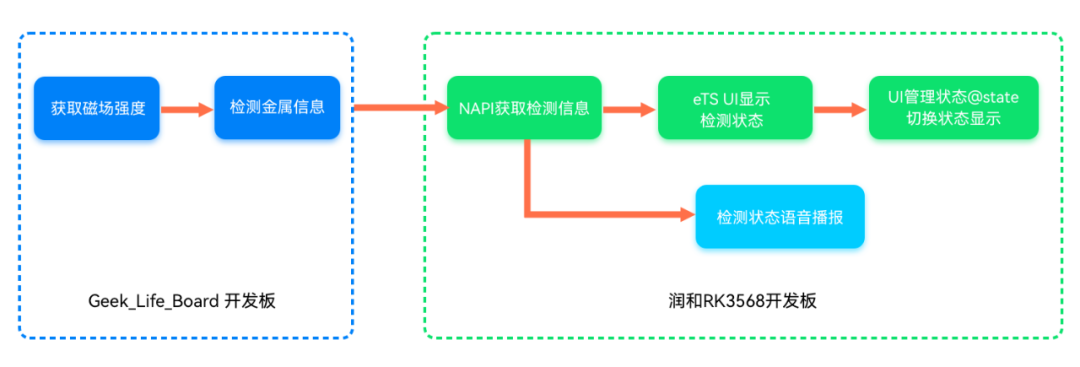
Geek_Lite_Board 开发板通过 AK8963 电子罗盘芯片获取地球磁场强度。通常地球的磁场强度是 0.4-0.6 高斯,当金属靠近电子罗盘芯片时,根据电磁感应原理,金属在磁场中的感应会引起磁场信号的变化。Geek_Lite_Board 开发板通过 Wi-Fi 与润和 RK3568 开发板实时通信,把检测到的信息实时上传。润和 RK3568 开发板作为应用端,采用方舟开发框架(ArkUI)基于 eTS 扩展的声明式开发范式编写页面,通过 NAPI 接口接收设备端 Geek_Lite_Board 开发板的检测信息,使用 OpenHarmony 媒体子系统中的音频播放功能实现语音播报金属检测状态。
磁场数据获取
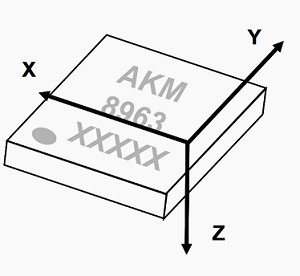
AK8963 一款具有高灵敏度霍尔传感器技术的三轴电子罗盘集成芯片,内部包含磁力传感器,可以在 x 轴、y 轴、z 轴检测地球磁场强度。
uint8_t Mpu_Read_Bytes(uint8_t const regAddr, uint8_t *pData, uint8_t len)
● 获取 AK8963 的磁场原始数据。● 对 AK8963 原始磁场数据进行转化,得到磁场强度,单位高斯。Mpu_Data.mag_x = (MPU_BUFF[16] << 8) | MPU_BUFF[15]; // x轴磁场数据Mpu_Data.mag_y = (MPU_BUFF[18] << 8) | MPU_BUFF[17]; // y轴磁场数据Mpu_Data.mag_z=(MPU_BUFF[20]<< 8)|MPU_BUFF[19];//z轴磁场数据
Gauss_Mag_z = Mpu_Calc.mag_z * 0.15f * 0.01f;
检测金属信息
首先采集 100 组 z 轴磁场强度基准数据,然后对这些数据做平均处理,由此得到 z 轴磁场强度的零点数据。以 origin_mag_z 作为零点,把获取到的磁场数据与它进行对比,以此来判断是否检测到金属。const uint16_t calibrateCount = 1000; // 测量最大次数为1000const uint16_t calibrateFrequency = 5; // 每测量5次取一次有效值const uint16_t calibrateAverageCount = 100; // 取100次有效值if(i < calibrateCount){i++;if(i%calibrateFrequency == calibrateFrequency){Mag_z_buff[j++] = Gauss_Mag_z;if(j >= calibrateAverageCount){i = calibrateCount;Mag_z_Flag = true;for(k=0;korigin_mag_z += Mag_z_buff[k];}origin_mag_z = origin_mag_z / calibrateAverageCount;// 校准完成,蓝灯亮,发送给应用端 "CalibrateOK"BLUE_LED_ON();memset(buff,0x00,sizeof(buff));sprintf(buff,"angle:%s","CalibrateOK");ESP8266_send_data(buff,strlen(buff));}}}
NAPI获取数据
NAPI(Native API)是 OpenHarmony 标准系统的一种 JS API 实现机制,适合封装 IO、CPU 密集型、OS 底层等能力并对外暴露 JS 接口,通过 NAPI 可以实现 JS 与 C/C++ 代码互相访问。润和 RK3568 应用端通过 NAPI 来接受设备端发出的检测信息。 ●底层 NAPI 模块封装封装模块名为 tcpserverapi,下载至 tcpservermodule 文件夹。下载完成后放到 3.1Release 源码根目录,并配置编译脚本;第一次编译完成需要烧写整个镜像,后面修改模块源码,只需将库 send 到板子里面。命令如下:●应用端导入 NAPI 模块// 先挂载,再sendhdc_std shell mount -oremount,rw /hdc_stdfilesendlibtcpserverapi.z.sosystem/lib/module/libtcpserverapi.z.so
import tcpserverapi from '@ohos.tcpserverapi'
●应用端 NAPI 接口调用// 调用initServer接口 初始化 TCP 服务器tcpserverapi.initServer()// 调用recvMsg 获取并解析Geek_Lite_Board开发板发送过来的角度tcpserverapi.recvMsg().then((result) => {var resultAngle = result.angle;})
UI状态显示与管理
如上图所示为检测中页面,整体布局分为文字标题和检测状态示意图。
文字标题由 Flex 布局容器 text 组件实现,用于呈现一段信息,如下为 text 接口相关属性。

Flex(options?: { direction?: FlexDirection, wrap?: FlexWrap, justifyContent?: FlexAlign, alignItems?: ItemAlign, alignContent?: FlexAlign })
●通过调用 recvMsg 接口接送金属探测器的消息,并修改首页展示状态,关键实现代码描述如下:其中 “ var intervalID = setInterval(() => ” 使用了定时器,定时调用 “recvMsg” 方法,通过 NAPI 获取金属检测结果。aboutToAppear() {var intervalID = setInterval(() => {tcpserverapi.recvMsg().then((result) => {}}}
当通过 NAPI 方式获取到检测信息为 “ metal:Detected ” 时,设置 detectionState 为发现金属状态,屏幕显示检测到金属页面;当通过 NAPI 方式获取到的检测信息为 “ metal:UnDetected ” 时,此时并未检测到任何金属信息,设置 detectionState 为检测中状态,屏幕显示检测中状态页面。if (resultMetal.match("metal:")) {this.metal = resultMetal.slice(6);console.info('=======' + this.metal)if (this.metal === 'Detected') {this.detectionState = '发现金属';this.detection = $r("app.media.img_detected");this.isDisplay = false;}else if (this.metal === 'UnDetected' || this.metal ==='CalibrateOK') {this.detectionState = '检测中';this.detection = $r("app.media.img_detecting");this.isDisplay = true;}}
语音播报检测状态
检测到金属后,RK3568 会播报已探测到金属的语音信息,达到通知用户的目的,通过 OpenHarmony 媒体子系统的音频播放功能实现。OpenHarmony 媒体子系统为开发者提供一套简单且易于理解的接口,使得开发者能够方便接入系统并使用系统的媒体资源。媒体子系统包含了音频播放、视频播放、音频录制和视频录制等常用功能。音频播放的主要工作是将音频数据转码为可听见的音频模拟信号并通过输出设备进行播放,同时对播放任务进行管理。本样例主要通过导入 media 模块、创建音频播放实例、实现音频播放接口和实现暂停播放接口等流程实现。
●导入media模块
import media from '@ohos.multimedia.media';
●创建音频播放实例// OH media对象privateplayer=media.createAudioPlayer();
●实现音频播放接口
使用 play() 调用开始播放音频资源,需在完成音频数据加载后,即 src 属性设置完成后才能调用。
play():void
四、总结
本文简述了如何使用 OpenHarmony 进行多设备的开发,演示了 NAPI、eTS UI、UI 管理状态 @state 和音频播放等技术特性的应用,通过这些多元化的功能,我们最终实现了金属探测器样例。丰富多样的 OpenHarmony 开发样例离不开广大合作伙伴和开发者的贡献,如果你也想把自己开发的样例分享出来,欢迎把样例提交到 OpenHarmony 知识体系 SIG 仓来,一起实现开发样例共建。五、参考链接
RK3568开发板上丝滑体验OpenHarmony标准系统
https://gitee.com/openharmony-sig/knowledge_demo_smart_home/tree/master/dev/docs/rk3568_quick_start
在Windows编译OpenHarmony工程
https://gitee.com/Cruise2019/team_x/blob/master/homework/ohos_build_win/readme.md
OpenHarmony NAPI 学习文档
https://gitee.com/javen678/hello-ohos-napi/tree/master/doc#/javen678/hello-ohos-napi/blob/master/doc/1.HelloNAPI.md
OpenHarmony基于eTS扩展的声明式开发范式
https://gitee.com/openharmony/docs/blob/master/zh-cn/application-dev/reference/arkui-ts/Readme-CN.md
音频播放开发指导
https://gitee.com/openharmony/docs/blob/master/zh-cn/application-dev/media/audio-playback.md
从零开发金属探测器应用
https://gitee.com/openharmony-sig/knowledge_demo_temp/blob/master/docs/metal_detection/quick_develop.md
GEEKROS官网
https://www.geekros.com/
审核编辑 :李倩
-
探测器
+关注
关注
15文章
2774浏览量
76075 -
蜂鸣器
+关注
关注
12文章
900浏览量
47860 -
OpenHarmony
+关注
关注
33文章
3979浏览量
21398
原文标题:基于OpenHarmony的智能金属探测器
文章出处:【微信号:gh_e4f28cfa3159,微信公众号:OpenAtom OpenHarmony】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
探测器革命
[VirtualLab] 光波导系统的均匀性探测器
请教:这个金属探测器电路图可行吗
电气火灾监控探测器的防护方

红外焦平面探测器核心指标NETD介绍
寒潮来袭,气体探测器能否“扛住”?

Amphenol数字红外探测器评估套件使用指南
基于新兴光响应材料的光电探测器
相机分辨率:融合探测器与光学性能
混合探测器与光电倍增管的区别以及参数解析

光电探测器PMT、APD、CCD、CMos、ICCD、EMCCD




评论