 智能巡检机器人提高了轨道系统运行的安全与稳定性
智能巡检机器人提高了轨道系统运行的安全与稳定性

随着我国高铁、地铁、城铁等轨道交通网络迅速增长,大量轨道交通基础设施陆续建设,随之产生的轨道线路检测工作也逐渐增大,而面对传统人工检测效率低,成本高、安全性差等问题,容易导致地铁隧道内各类安全事故时有发生。
国辰机器人针对轨道交通机器人可以与列车同步运行,实时、无间断巡检,将突发、随机事故防患于未然,可做到实时监视。每日一次,在列车运营空窗期代替人工巡检裂缝与湿渍检测,实时监拍。因为我国各城市地铁线路覆盖范围更广,人员需求量更大。显然,地铁人力运维成本更大,工作中存在的安全隐患也没法保障。
地铁列车巡检机器人利用激光、雷达等多种传感器技术,可实现测绘级检测精度。可应用站台、隧道和户外在内多种轨道交通场景中,可按照预设线路自动行进,实现障碍物识别,远程遥控,对各种影响车辆通行安全的指标进行智能测量,发现问题及时报警,做到人不下道作业。相比传统人工巡检的方式,大大提升作业速度、精度和人员安全,高效保障轨道交通安全。
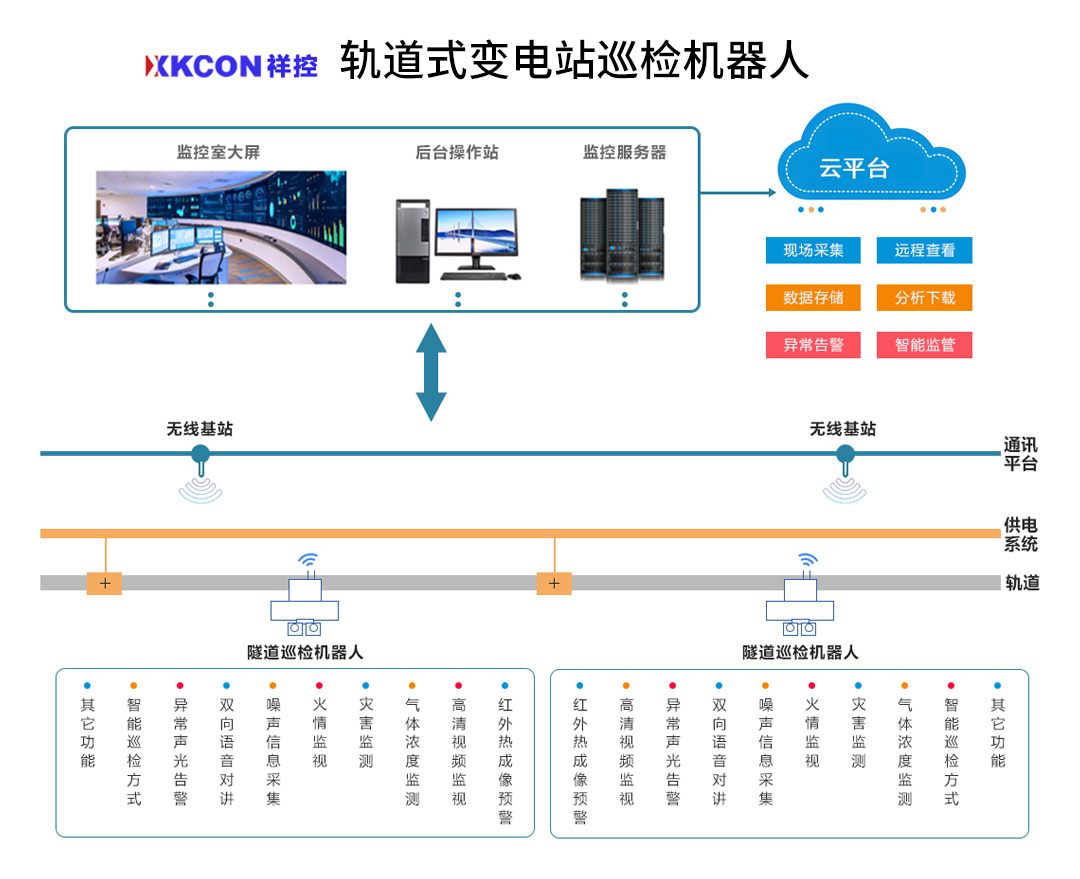
轨道智能巡检机器人的功能:
智能视频识别:机器人搭载的高清可见光摄像机,结合图像识别技术对巡检区域的指针表计、数显表、翻版液位计、轴承油位、避雷器动作次数、电气开关和阀门位置等进行数据自动识别、上传、自动生成报表和趋势曲线,并判断报警;
红外热成像(轨道机器人巡检功能):机器人搭载红外成像仪对转机轴承温度、保温蒸汽管道泄漏、变压器等设备的接头温度进行测量。可进行红外普测(面)以及设备精确测温(点),通过机器人的智能分析识别系统,实现数据采集、上传、报表、趋势、报警等功能。
激光测振及拾音:通过设备改型(云台、主板、电源)、兼容性开发等工作,实现了智能巡检机器人搭载激光测振仪,具备巡检区域转机轴系振动测量和声音重现功能,实现转动机械的非接触式振动测量、内部声音采集及相关数据分析等功能。
专家系统:采集机器人巡检系统自身状态信息、配置巡检任务,实现数据采集、存储、传输到后台进行记录、分析、报表、趋势、报警;并开放组态功能,通过后续数据库、建模、二次开发,实现设备异常的自诊断,相关功能的不断完善。手机APP:实现对机器人状态、设备状态等监控功能。
轨道系统运行的安全性与稳定性将会关系到社会民生的安全,轨道巡检为主要环节之一,机器人在轨道巡检中的应用具有十分重要的意义,将大大提高轨道运维自动化程度,同时减少运行人员劳动强度,提高设备巡检质量。
审核编辑:符乾江
-
机器人
+关注
关注
213文章
31439浏览量
223634 -
激光雷达
+关注
关注
982文章
4548浏览量
197081 -
智能识别
+关注
关注
0文章
215浏览量
19099
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
隧道巡检机器人

XKCON祥控挂轨式输煤栈桥安全巡检机器人

Neway电机方案在机器人技术方面的优势
Neway微波的稳定性优势

配电房 AI 巡检机器人系统 挂轨式移动架构 精准感知、稳定运行、智能分析

轨道式智能巡检机器人XKCON-RTI应用于变电站,对站内设备进行定期巡视和检查,及时发现隐患并报警



评论