 使用workvisual软件对KR C4进行外部轴配置
使用workvisual软件对KR C4进行外部轴配置

•操作步骤
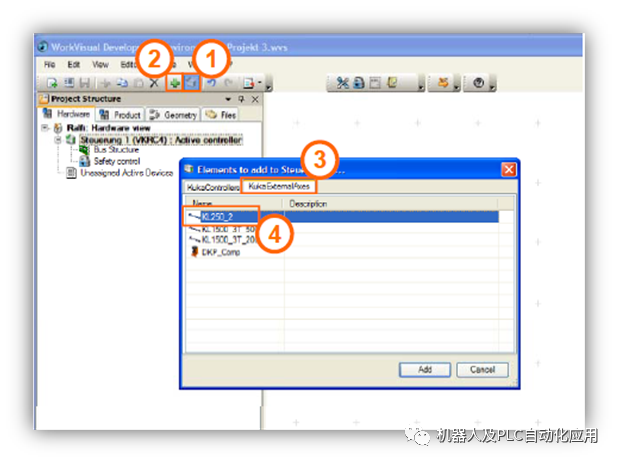
① 进入workvisual软件,打开或创建一个项目,如左图所示。
② 通过菜单栏“文件”选项,选择“Cataloghanding…”,如右图所示。
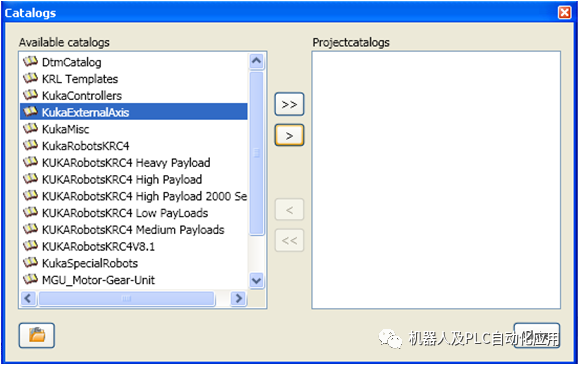
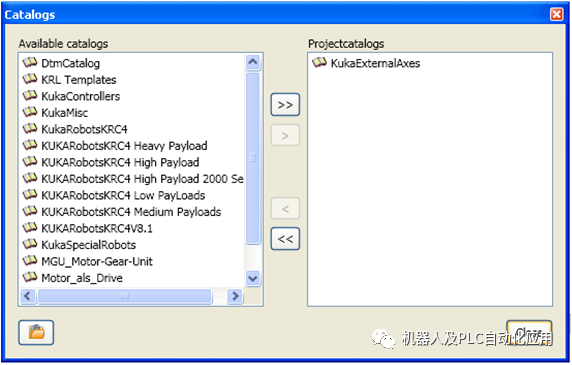
•接着在弹出的选择窗口中,选择样本文件,如左图所示,然后通过添加按钮添加到主目录框中,如右图所示,这样样本导入完成。
③ 激活项目并将样本添加到项目中,如图所示。
(1)激活项目
(2)添加样本
(3)选择外部轴栏
(4)选择需要的外部轴
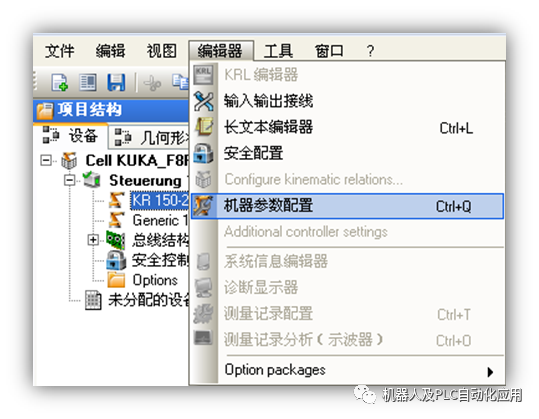
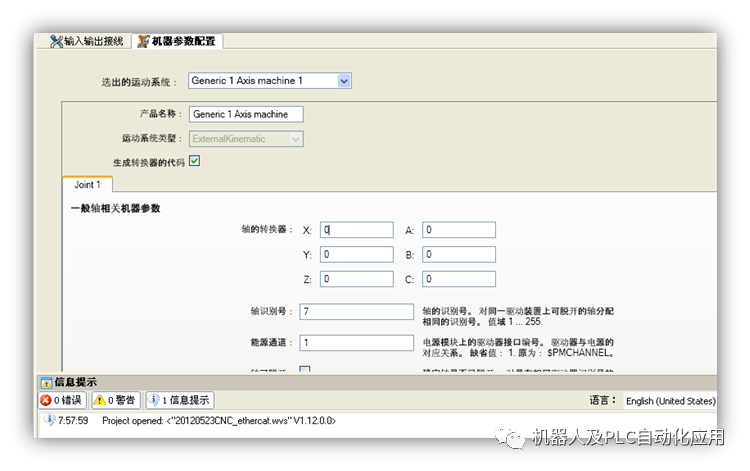
④在项目结构中,选中机器人,单击编辑器菜单,选择“机器参数配置”选项,如左图所示,之后弹出机器人参数配置窗口,如右图所示,在窗口中输入机器人各项参数.
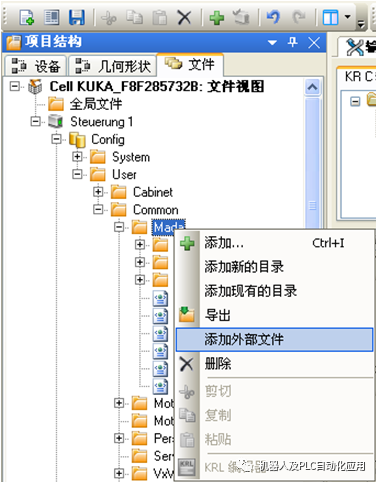
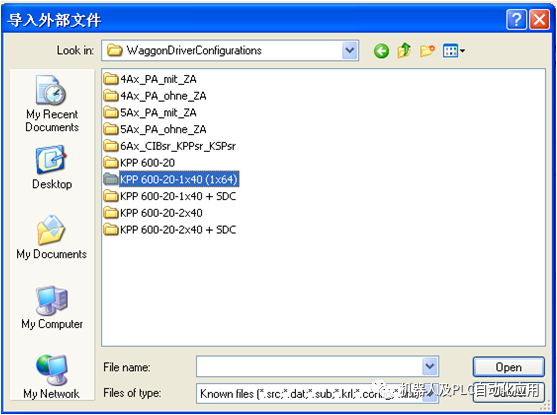
⑤ 进入“文件”界面,加入驱动文件,在这之前,需要到C:Program FilesKUKAWorkVisual2.4WaggonDriverConfigurations找到KPP的驱动文件,如果是是一个外部轴选择KPP600-20-1x40 (1x64),如果是两个外部轴选择KPP 600-20-2x40,把其中的两个文件导入到MADA目录下。
注意:如果是PA的机器人,外部轴通道是连接在KSP上的,因此这边需要选择4Ax_PA_mit_ZA或者5Ax_PA_mit_ZA。
•然后选中“mada”文件夹,右击,选择“添加外部文件”选项,如左图所示,在弹出的导入外部文件窗口中选择“KPP 600-20-1×40(1×64)”并双击打开,选择文件夹中的文件,并单击“Open”按钮,以导入外部文件,如右图所示。
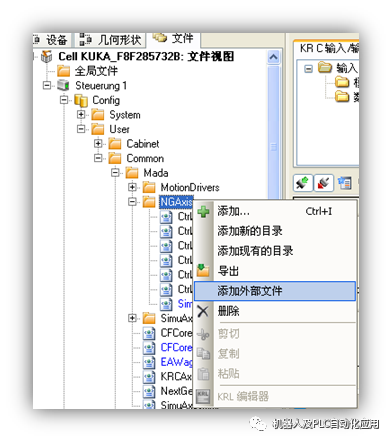
⑥ 导入外部轴配置文件,选中“文件”栏中的“NGAxis”文件夹,并右击选择“添加外部文件”选项,如左图所示。
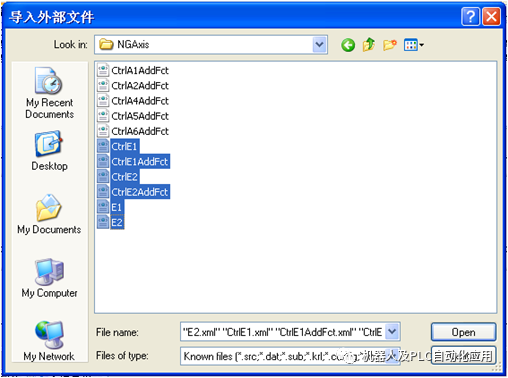
⑦ 选择“NGAxis”文件夹下的相关压缩包文件CtrlE1.xml, CtrlE1AddFct.xml, E1.xml,,如右图所示。如果是轴2系统,则在添加一次,名称换成E2即可.
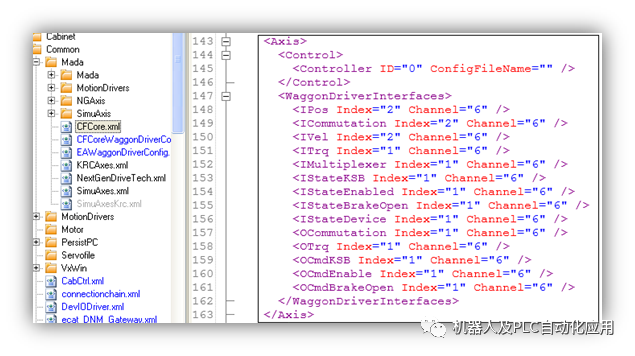
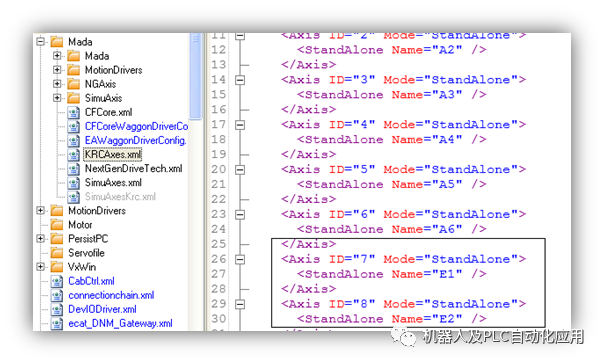
⑧ 在“Mada”文件夹下,选择“SimuAxis”文件夹,找到CFCore.xml,复制如下左图所示的一个块,放到最后,然后把通道改成6,如果是2轴则再复制一个块,通道一个改6一个改7。
⑨ 在“SimuAxis”文件夹下,找到KRCAxes.xml,复制如下右图所示的一个块,把名字改成E1或者E2。
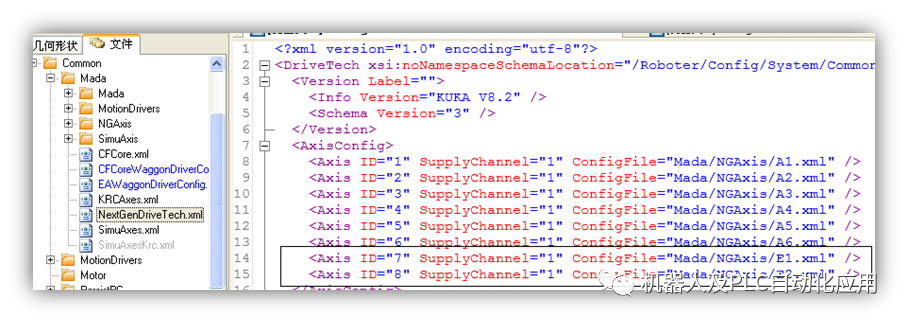
⑩ 在“SimuAxis”文件夹下,找到NextGenDriveTech.xml,如下图所示这样添加第七和第八轴,名字改成E1.xml, E2.Xml。
⑪ 将项目导入机器人,在能在机器人上进行参数的设置。在操作机器人时需注意,将坐标系调至“轴坐标系”下。
审核编辑 :李倩
-
机器人
+关注
关注
213文章
30618浏览量
219682 -
软件
+关注
关注
69文章
5300浏览量
90901
原文标题:使用workvisual软件对KR C4进行外部轴配置
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
IWDT窗口看门狗的配置
IWDT独立看门狗的配置
AT32F4xx I2C使用轮询模式进行主机发送从机接收
AT32F4xx I2C使用轮询模式进行主机接收从机发送
Proteus中配置STM32外部时钟HSE如何配置
【RA4M2-SENSOR】5、外部中断按键+低功耗模式+功耗测量
GraniStudio零代码平台轴复位算子支持多少个轴同时复位,有哪些回零模式?
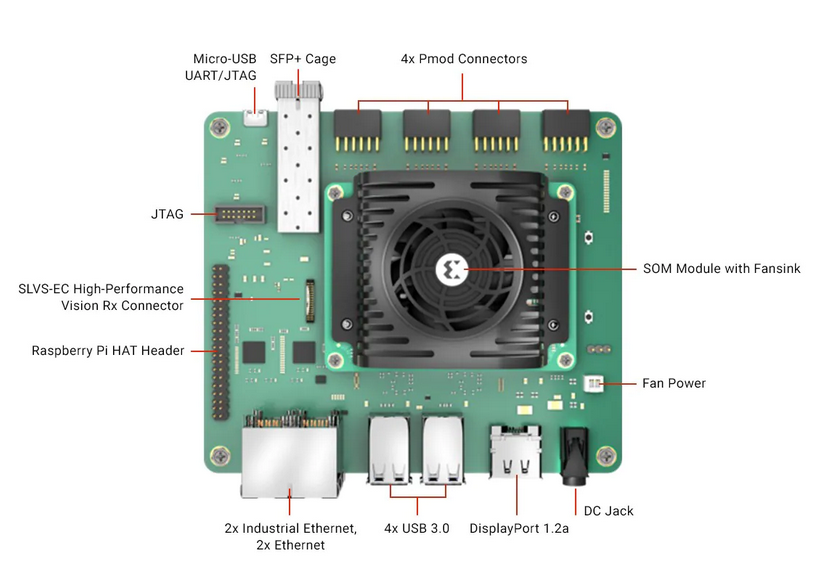
机器人开发套件 Kria KR260
如何通过USB或者I2C对DLPC910的寄存器进行配置?
使用DP130将4路等差输入信号通过I2C配置对应到4路等差输出信号,I2C通过软件初始化完成不再对其操作,是否可以?
EE-204:Blackfin处理器SCCB软件接口,用于配置I2C从器件






 工商网监
工商网监
评论