 双目标定是什么?为什么要进行双目标定?
双目标定是什么?为什么要进行双目标定?

1 前言
双目相机标定,从广义上讲,其实它包含两个部分内容:
两台相机各自误差的标定(单目标定)
两台相机之间相互位置的标定(狭义,双目标定)
在这里我们所说的双目标定是狭义的,讲解理论的时候仅指两台相机之间相互位置的标定,在代码实践的时候,我们才说完整的双目标定。 首先来思考一个问题:为什么要进行双目标定?
这是因为在许多三维重建算法中,我们都要知道两台相机之间的相对位置关系,这样才能进行距离计算。
基线:两个光心的连线称为基线;
极平面:物点(空间点M)与两个光心的连线构成的平面称为极平面;
极线:极平面与成像平面的交线
极点:极线的一端,基线与像平面的交点
像点:极线的一端,光心与物点连线与像平面的交点;
可以看出:
校正前,相机的光心不是相互平行的
校正后,极点在无穷远处,两个相机的光轴平行,像点在左右图像上的高度一致
标定+校正后图片: 图1 立体校正后左右相机图像发生一定扭曲这样的好处是:比如后续的立体匹配时,只需在同一行上搜索左右像平面的匹配点即可,能使效率大大提高。
注:可以看出来,最重要的,我们要知道右相机相对于左相机的位姿关系,那我们才可以做校正!
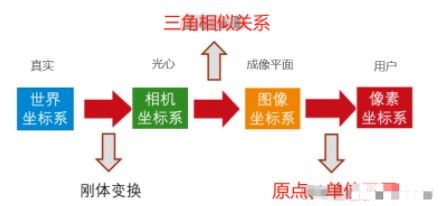
2 单目理论回顾
先来回顾下单目标定理论,理想的单目相机模型可以简化为:
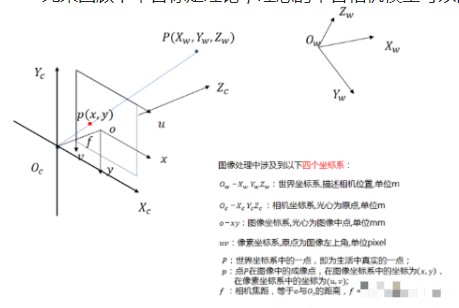
而四大坐标系,包括世界坐标系、相机坐标系、图像坐标系、像素坐标系,它们之间的转换关系如下:
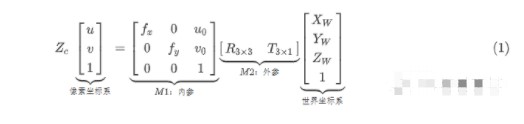
最终,从理想的相机模型,从世界坐标系到像素坐标系的转换关系:
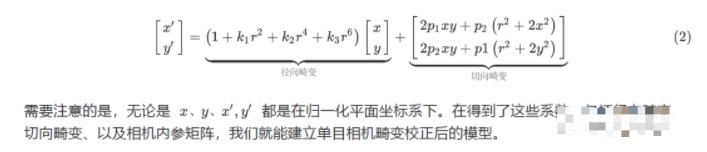
但由于制造原因,使得成像过程(从相机坐标系到图像坐标系转换过程中)存在着畸变,主要有两类,径向畸变和切向畸变,它们可以通过以下公式进行修正:
3 双目标定公式推导
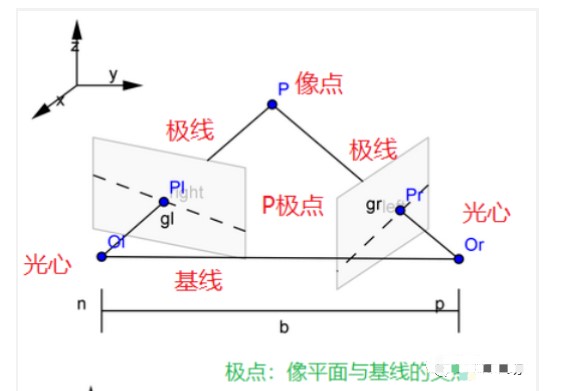
图3 标定模型 [2] 记:
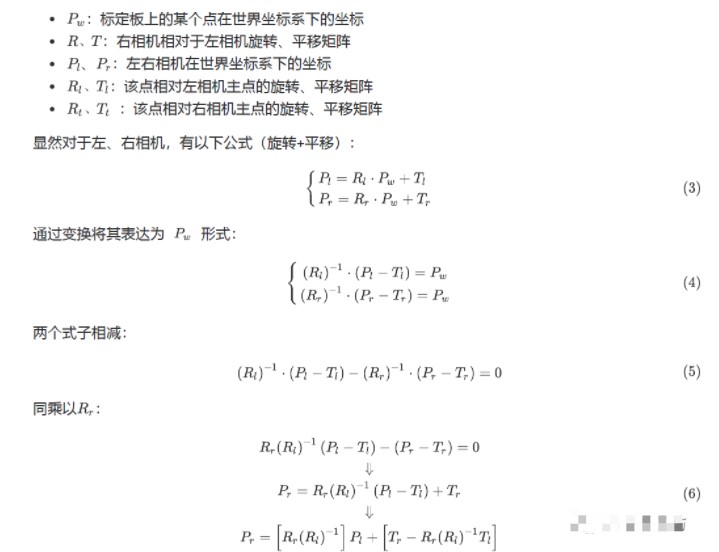
另外,右相机主点相对于左相机主点,显然还有: 
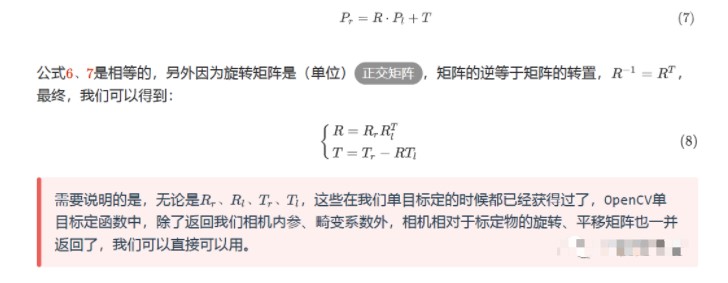
代入上式,因为拍摄了多张图片,利用最小二乘法,也可以是奇异值分解(数学的部分比较复杂,在这里忽略),总而言之,最小化误差,即可得到我们最佳估计的 矩阵,有了这两个矩阵,我们做个旋转、平移就可以了。 注:虽然得到了旋转、平移矩阵,也但是极线校正的方法有很多,这个我们之后讲。
4 极线校正理论推导
双目标定后,我们得到了右相机相对于左相机的位姿关系,也就是R、T矩阵,下面一步即做极线校正。校正好处是之后做立体匹配搜索的时候,只需要在同高度附近进行搜索,大幅提升效率。根据前文的推导,在获取了R、T矩阵后,我们就要进行极线校正(立体校正),使两部相机光轴平行,如下所示:
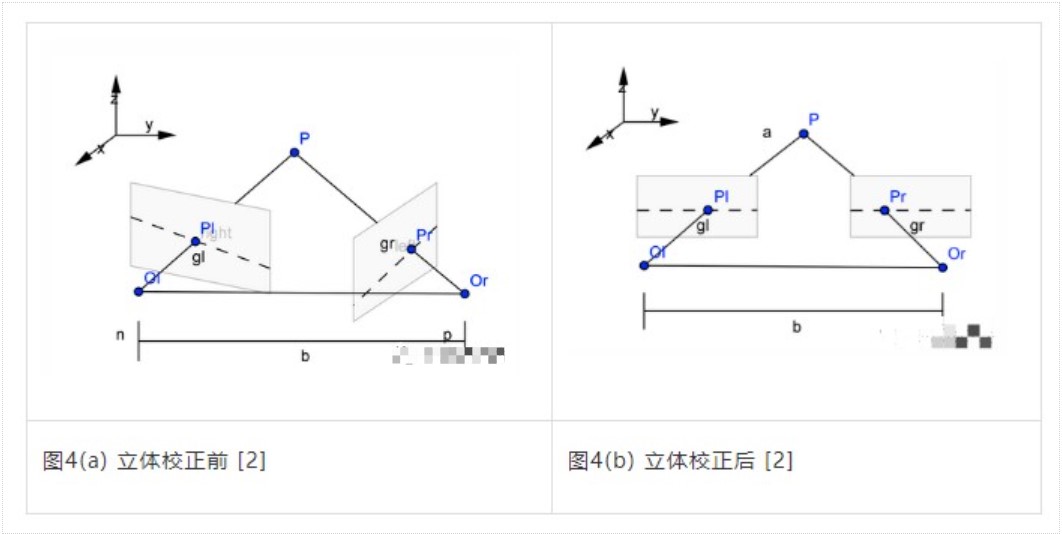
图4(a) 立体校正前 [2]图4(b) 立体校正后 [2]
但是平行的方法有很多,可以:
左相机不动,右相机动。
也可以两部相机旋转到中间等等。
最常见的校正方法就是Bouguet极线校正方法。
Bouguet极线校正方法:左右相机成像平面各旋转一半,使得左右图像重投影造成的误差最小,左右视图的共同面积最大。
具体步骤(这块理论推导可以去看论文,这里只给出结论,看不懂没关系,不妨碍我们使用它):
得到这两个变换矩阵,左、右相机分别乘以这两个矩阵即可完成变换,其中已经包含了平移信息!
再计算重投影矩阵,其实现了像素坐标系(左相机)到世界坐标系之间的转换:
校正后,可以根据需要对图像进行裁剪,需重新选择一个图像中心,和图像边缘从而让左、右叠加部分最大。
责任编辑:lq6
-
三维
+关注
关注
1文章
529浏览量
29979 -
双目标定
+关注
关注
0文章
2浏览量
1383
原文标题:一文详解双目相机标定理论
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
自动驾驶激光雷达应如何进行标定?

零碳园区光伏配套:西格防逆流系统,助力园区实现 “能源自给 + 零逆流” 双目标

电驱动系统标定全流程指南:从生产扭矩秩序、基础参数,到 MTPA与弱磁、诊断架构与模型化标定闭环

双目立体视觉相机产品介绍

福禄克柔性化压力传感器生产标定系统产品简介

TGS2602 空气中如何标定?

ECU刷写前的“隐藏关卡”:3分钟看懂XCP/CCP标定

CANape标定窗口被锁无法标定

IMU+多相机高速联合自动标定方案
什么是传感器标定?传感器标定真的如此重要吗?
GraniStudio:相机标定例程

不确定度评估新实践:传感器标定中的置信概率与误差传递法则
光子精密双目3D线激光轮廓测量仪,摆脱视觉盲区,1台更比2台强!
双目视觉在智能驾驶领域的应用
《聊一聊ZXDoc》之汽车标定、台架标定、三高标定



评论