 Luminar激光雷达设计的详细介绍
Luminar激光雷达设计的详细介绍

Luminar是目前市值最高的激光雷达公司,巅峰期市值大约120亿美元,目前市值在90亿美元上下,是老牌激光雷达厂家Velodyne市值的4倍左右,而Luminar没有量产产品。Luminar高估值的原因一是其性能是目前最好的,二是市场憧憬苹果采用Luminar的激光雷达造车。
剖析Luminar激光雷达设计还是从专利入手,2020年9月Luminar公布一项专利,可以看作对其激光雷达设计的详细介绍。
Luminar独家采用光纤激光设计,光纤激光已经成熟应用二十年以上,其功率高,用光纤传递激光,一个激光源可以对应多个激光雷达,激光源可以放在车内任何地方,让激光雷达布局非常灵活,体积也可以大大缩小。如上图所示,404是光纤激光源,可以布局7个激光雷达。 要提高激光雷达性能最简单有效的办法就是提高激光发射功率。Luminar采用光纤激光放大方式,功率大约是传统半导体激光二极管的40倍。这也使其成为性能最强的激光雷达。
要提升功率,就不得不考虑人眼安全,对于常用的905纳米来说是不合适的,只有1550纳米的InGaAs,它和905纳米的硅光电探测器比要安全太多,可以放心地加大激光器的功率。Luminar就是以使用1550纳米的InGaAs为特色的,其使用的激光器的功率是传统硅光电系统的40倍,不仅提高信噪比,减小脉冲宽度至20纳秒以下,脉冲重复频率低于100MHz,占空比低于1%。同时提升了有效距离,而且1550纳米也是全天候的,在雨雪雾天,都基本没影响,Luminar强调即使10%反射率的物体,有效距离也可以达200米,理论最远距离高达1公里。 关于激光功率的放大,Luminar申请了专利。其专利是用二级大模场掺铒光纤(EDFA)放大器将一个种子源激光调制为一个脉冲宽度至20纳秒以下,脉冲重复频率低于100MHz,占空比低于1%的脉冲激光系统。Luminar的专利核心一个种子源激光,另一个是掺铒光纤放大器。
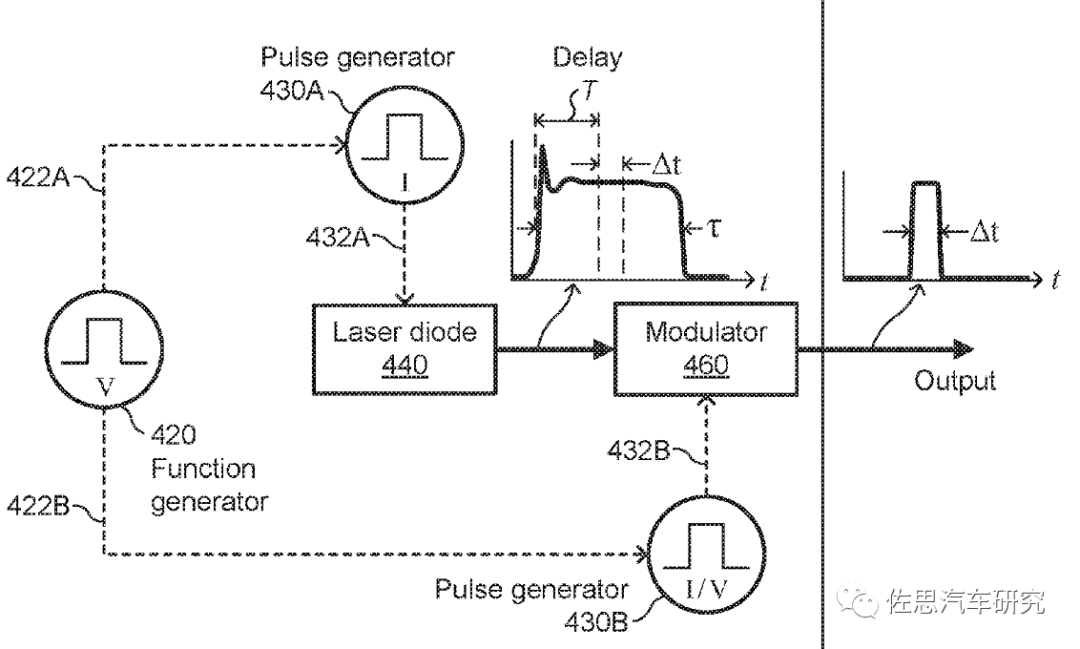
Luminar的种子源激光器内部构成
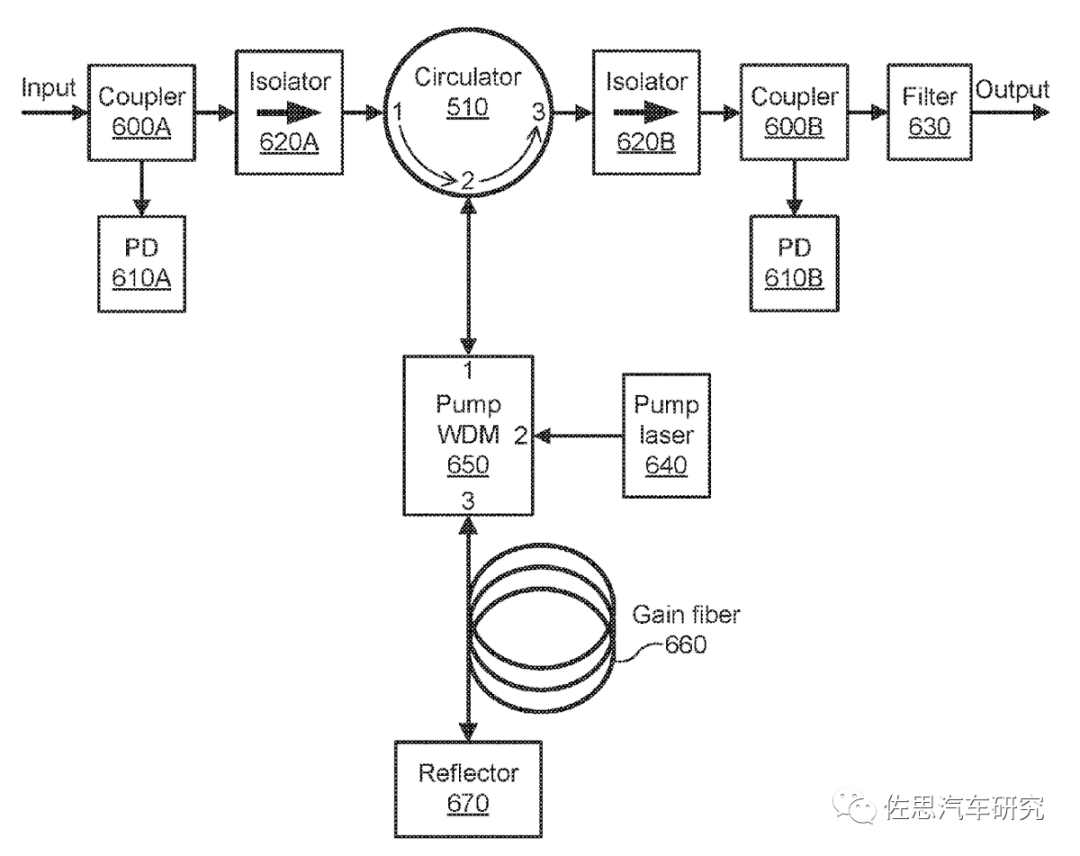
Luminar的放大器内部构成
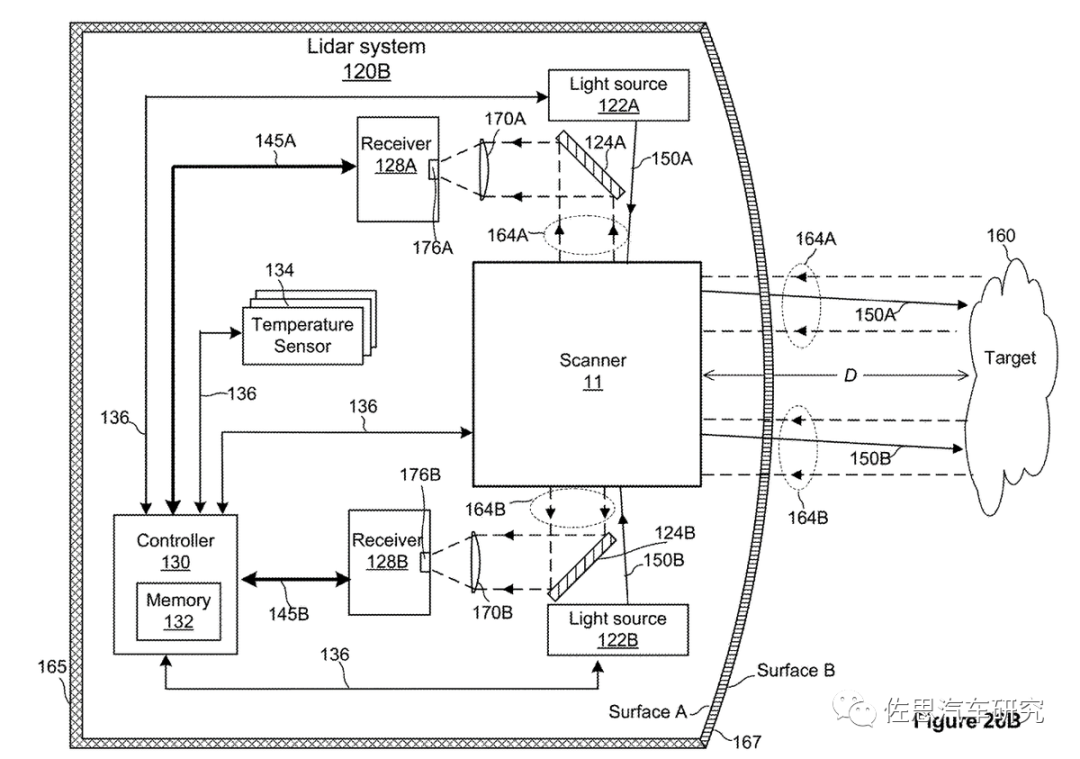
Luminar激光雷达内部框架
与其他激光雷达不同,Luminar是特殊的双系统设计,这也是光纤激光的特色,即WDM,波分复用技术(wavelength-division multiplexing,WDM)是将一系列载有信息、但波长不同的光信号合成一束,沿着单根光纤传输;在接收端再用某种方法,将各个不同波长的光信号分开的通信技术。这种技术可以同时在一根光纤上传输多路信号,每一路信号都由某种特定波长的光来传送,这就是一个波长信道。因为不同波长的激光性能不同,905纳米的波长受阳光干扰最小,1550纳米则最大,接收元件增益越高,干扰就越明显,干扰通常可看作是虚像,这也是1550纳米激光雷达很难解决的问题。Luminar可以采用双波长设计,一套1550纳米、一套905纳米,两套配合,剔除掉虚像。也可以采用单波长设计,两套系统互相做差分纠正,防止出现虚像。再有就是两套系统的FOV不同,通常FOV大就意味着分辨率低,小FOV意味着分辨率高。先用一个大的FOV用来搜索目标,搜索到目标后得到ROI区域,再用小FOV系统对应。 光源122A接收来自光纤的激光,发射激光150A到扫描器11,扫描器将激光做水平和垂直扫描,激光到达目标160后反射光164A返回到重叠反射镜124A上,124A将光线转向接收聚焦镜170A,光线穿过170A到达接收模块128A,产生的数据信息145A传给控制器130。136是扫描器、控制器与光源之间的接口。
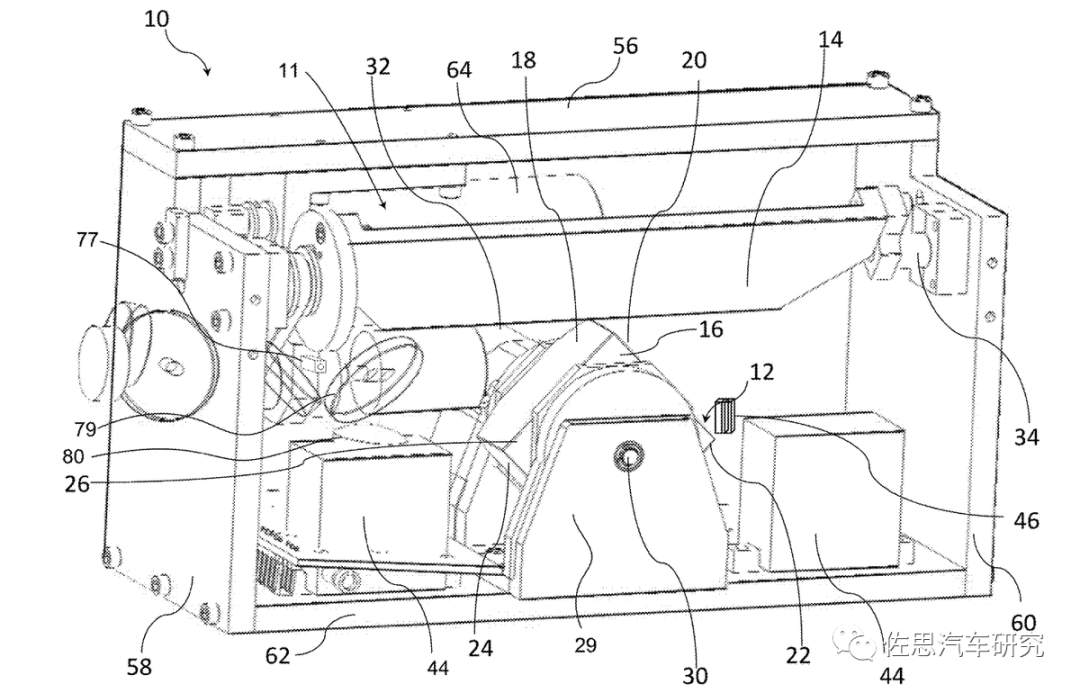
Luminar激光雷达内部解剖图
核心元件是两个扫描器,一个是水平扫描器12,它包含一个矩形立方体16,有18、20、22、24四个反射面,也就是多面体扫描镜,也叫多边形棱镜,29为支架,30为电机主轴,32为电机。56、58、60是外壳,44是接收模块,80是接收聚焦镜,即上文的170的一部分。14为垂直扫描器,64为垂直扫描器电机。46是DOE,即衍射光学元件,衍射光学元件(Difractive Optical Element,DOE)是相位元件,它使用嵌入在元件中的薄微结构将输入激光束控制为各种输出轮廓和形状。衍射光学器件可实现许多功能和光操作,而这在标准折射光学器件中是不可行的。DOE可适用于多种类型的输入激光(如单模高斯激光、多模激光等),在激光焦面上形成指定的光斑形状和光强分布,还可以实现在激光传播方向特定的光强分布。 多边形棱镜(Polygon Mirror)在激光打印机中早已大量使用,技术非常成熟,全球激光打印机用多边形棱镜扫描系统被日本电产公司垄断,因为该公司也是全球最顶级的精密电机厂家,电机领域技术门槛最高的硬盘电机就是由该公司垄断,之前美蓓亚还有10%的市场占有率,但被三美电机收购后,就基本由日本电产垄断。 国内蔚来使用Innovusion图达通的激光雷达,也是这种多边形棱镜设计。
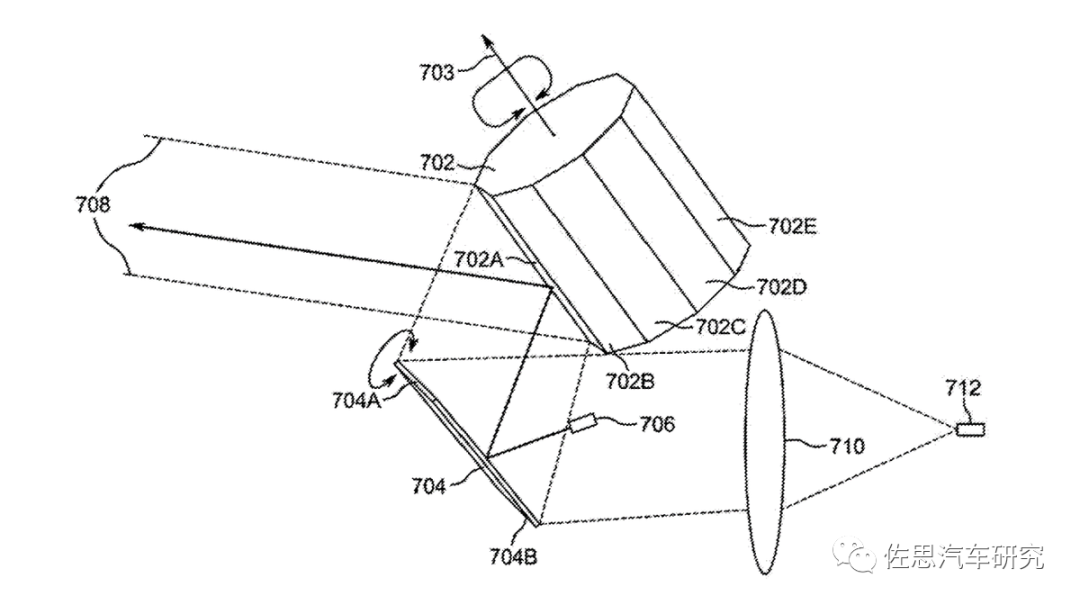
Innovusion图达通激光雷达的扫描器专利解说图
Innovusion图达通激光雷达的扫描器主要由多边形棱镜702和电流扫描振镜704组成,706是激光源,712是激光反射接收光电二极管,710是反射接收聚焦透镜。702做水平扫描,704做垂直扫描。 电产基本垄断激光雷达用多边形棱镜市场,通常是六边形,Luminar这一代还是采用电产的常规产品,下一代采用订做的四边形棱镜,Innovusion图达通应该也是六边形多棱镜扫描器。 它也不是严格的四面体。具体形状如下图。
看完水平扫描器,来看垂直扫描器。
垂直扫描器如上图,64为电机,这是一种特殊FAULHABER直流无刷电机,与传统铁芯直流电机的区别在于转子特有的空芯杯斜绕组的自承式铜线圈。这一开创性设计的固有特性包括非常低的转子惯量、无齿滞或转子位置。这些特性决定了电机具备独特的高功率密度和高动态性能。最初由 Fritz Faulhaber Sr. 博士发明,并在1958年注册,体积很小,使用最高级的钕铁硼磁体,价格昂贵。74为皮带,66、68、70是滑轮组,72是编码器,72与64通过齿轮连接。54是反射板。
54上贴着三角形反射镜52,与水平扫描器12互相配合。三角形最长的一边长度与水平扫描器的一边长度相同。
77为准直透镜(实际是包含了两个透镜),激光器124发射的激光经过准直透镜从点球状变为平行光束,再经过重叠环形镜79发射,82为入射光,83为反射光。79的反射部分就是上文说的124。
Luminar的接收雪崩二极管图
1550纳米的激光必须配合InGaAs或InGaAsP的吸收层。典型1550纳米激光二极管是四层结构,如上图,底层是InP基板,中层是InGaAs或InGaAsP的吸收层,又叫量子陷阱有源层,上层是InP雪崩层,最上层是p型InP,即光栅层。这种就是传统dfb外延,这种结构中光栅在p型层,这会导致寄生电阻和寄生电容增加,影响了dfb激光的调制速,p光栅由于激射阈值和寄生电阻的限制,其工作温度范围较窄,这也是除了昂贵外很多厂家不用1550纳米激光二极管的主要原因,为了提高dfb激光器的温度范围,一个可行的办法是光栅位于n型层,由于n型半导体材料中,传输电流的载流子是电子,其具有比p型半导体载流子空穴更长的载流子寿命和输运长度,可以弥补光栅过厚对激光器电性能的影响。
然后在n型半导体材料中生长光栅,意味着有源区需要在光栅制作完毕后生长,而量子阱有源区与光栅的间距小于100nm,在如此小的厚度上,需要掩埋光栅并获得平整的量子阱界面,难度极大。 Luminar认为垂直扫描器转动就像一个风扇在转动,有助于散热,不过如果是完全封闭外壳,这样散热效率也不高,如果开放式,那么防尘处理将非常困难。 1550纳米激光二极管的制造属于光通信领域,这个领域已经发展了30年,没有什么挖掘潜力了,以Luminar一个光通信局外人的公司不可能有所突破,也不可能降低1550纳米激光二极管的成本,1550纳米激光二极管的制造过程类似于LED芯片或SiC芯片,即采购外延片做基板,用MOCVD机台蒸镀有源层。InGaAs或InGaAsP外延片全球主要是三家,日本的三菱电机、昭和电工和美国的MACOM。目前外延片最大为6英寸晶圆。外延片成本占到55%左右,因为需求量低,加上没什么竞争,外延片价格很难降低。
Luminar与特斯拉如出一辙,那就是完全不考虑什么车规,只追求最高性能,追求最短时间内出货,特斯拉新Model S使用功耗超过200瓦的AMD显卡,在传统车企看来,这是一种不折不扣的疯狂行为。Luminar也是如此,双电机,还有皮带带动,可能没考虑防尘,光接收峰值功率与接收器孔径面积成正比,这样做是为了比较容易形成大的接收器孔径面积,这是近乎疯狂的设计。温度适应性和可靠性几乎都没有考虑。不过这个时代,不是产品说了算,而是资本说了算,再好的产品,没有资本捧场跟废品没区别。
原文标题:剖析市值最高激光雷达公司Luminar那近乎疯狂的设计
文章出处:【微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
激光雷达
+关注
关注
983文章
4599浏览量
197416 -
Luminary
+关注
关注
0文章
21浏览量
8162
原文标题:剖析市值最高激光雷达公司Luminar那近乎疯狂的设计
文章出处:【微信号:zuosiqiche,微信公众号:佐思汽车研究】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为啥自动驾驶不使用1550纳米激光雷达?

万线激光雷达是依托什么技术实现的?

固态激光雷达参数以及避障视频
自动驾驶激光雷达会伤害人体吗?

禾赛科技位列全球激光雷达行业专利第一

如何解决激光雷达点云中“鬼影”和“膨胀”问题?

负债达70亿元,曾经的美国最大激光雷达公司Luminar,破产!

看点:激光雷达制造商Luminar申请破产重整 马斯克身家跃升至6770亿美元
禾赛科技与理想汽车续签激光雷达合作
激光雷达为什么会出现串扰的问题?

华为,激光雷达第一! 车载激光雷达市场的“隐形冠军”


FMCW激光雷达,加速落地工业场景
SPAD席卷车载激光雷达市场
超酷的树莓派激光雷达扫描仪!




评论