 KUKA电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
KUKA电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置

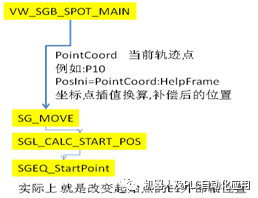
SGL_MoveToPos(SGEQ_StartPoint,SGEQ_StartPoint,#CLS_OPEN,MovementType)
MoveType =MovementType=#SG_PTP 点到点
ContType=#CLS_OPEN
TargetPos =SGEQ_StartPoint
HelpPos= SGEQ_StartPoint
GLOBALDEF SGL_MoveToPos(TargetPos:IN,HelpPos:IN,ContType:IN,MoveType:IN)
该程序用于在焊接前移动到焊接轨迹点使用
DECLE6POS TargetPos, HelpPos
DECL SG_Cont_T ContType
DECL SG_MoveType_T MoveType
CONTINUE
IF((ContType==#SOPEN) OR (ContType==#SCLOSE) OR (ContType==#CLS_OPEN))THEN ContType==#CLS_OPEN
; 关于PTP的第二近似定位=> LIN和LIN至PTP ..
SWITCH MoveTypeMoveType=#SG_PTP 点到点
CASE #SG_PTP 点到点
PTP TargetPos C_DIS 使用轨迹逼近
CASE #SG_LIN直线
LIN TargetPos C_DISC_DIS
CASE #SG_CIRC 圆弧
CIRC HelpPos, TargetPos C_DISC_DIS
ENDSWITCH
ELSE 如果没有上述激活功能ContType=….直接移动没有过渡
SWITCH MoveType
CASE #SG_PTP
PTP TargetPos
CASE #SG_LIN
LIN TargetPos
CASE #SG_CIRC
CIRC HelpPos, TargetPos
ENDSWITCH
ENDIF
CONTINUE
责任编辑:xj
原文标题:KUKA 电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
213文章
31442浏览量
223653 -
伺服
+关注
关注
17文章
705浏览量
43540 -
KUKA
+关注
关注
3文章
218浏览量
17512
原文标题:KUKA 电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
10.如何在Allegro中快速精准移动器件?| 芯巧Allegro PCB 设计小诀窍
有没有办法将“/”ext4 分区移动到我的 NVMe 中?
FPGA焊点高度测量方案

MT6813 磁角度传感器在伺服电机位置检测中的应用
倍加福电感式距离传感器在开关阀位置反馈中的应用
电液伺服作动器为何标配磁致伸缩位移传感器
汽车电子PCBA加工中影响焊点透锡率的因素
移动电源全自动点焊机:高效精准的电芯焊接解决方案
一文搞懂焊点金脆性问题的成因与破解方案

端子焊接焊点检测愁?智能视觉方案 99.99% 检出率,告别人工显微镜目测难题!
PCB电子微焊点难焊接?紫宸激光锡球焊接工艺精准破局

如何使用 M031 系列微控制器 (MCU) 的 PDMA 将 SPI 闪存中的图片数据移动到 TFT 显示器?
TNC插座焊接的“反向验证”:用故障模拟推导正确焊点形态

新能源汽车焊接材料五大失效风险与应对指南——从焊点看整车可靠性



评论