 MT6813 磁角度传感器在伺服电机位置检测中的应用
MT6813 磁角度传感器在伺服电机位置检测中的应用

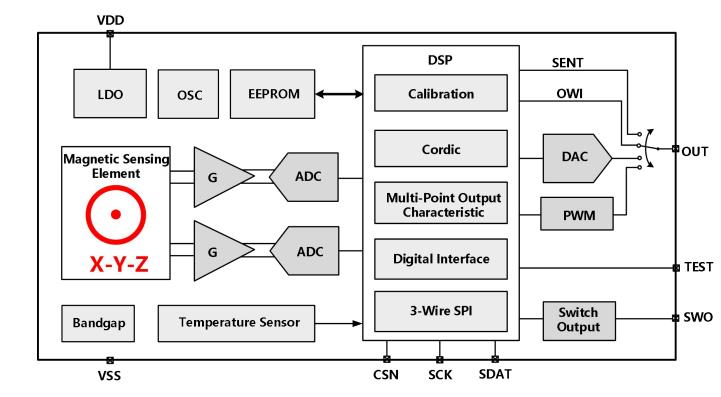
伺服电机的精准控制依赖实时可靠的位置反馈,传统光学编码器易受污染、霍尔传感器精度不足的问题,限制了伺服系统在复杂工况下的性能发挥。MT6813IC 作为基于 AMR(各向异性磁阻)技术的 14 位绝对角度传感器,凭借 16384 个位置分辨率(0.0219°/LSB)、±1.2° 典型线性度偏差及 - 40℃~125℃宽温适应性,成为伺服电机位置检测的高性价比解决方案。其非接触式设计、抗干扰能力强、安装容错率高的优势,已在工业伺服、机器人关节电机等场景中实现规模化应用,以下从技术适配、系统集成、性能优化等方面展开解析。
一、技术适配性:伺服电机位置检测的核心需求匹配
伺服电机对位置传感器的核心要求集中在精度、响应速度、可靠性及环境适应性四大维度,MT6813 的技术参数与这些需求形成精准匹配:
精度满足中端伺服需求:14 位绝对角度测量能力,配合误差补偿算法可将系统误差压缩至 ±0.1° 以内,完全覆盖通用工业伺服(±0.3°)及机器人关节电机(±0.1°)的精度要求,相较于传统霍尔传感器精度提升 3 倍以上;
响应速度适配高速运行:支持最高 15krpm 转速测量,通过传播延迟补偿算法,角度数据更新延迟≤1μs,可满足伺服电机 20000rpm 以内的高速控制需求,为 FOC(磁场定向控制)算法提供实时角度输入;
可靠性突破环境限制:非接触式磁传感原理避免机械磨损,MTBF(平均无故障时间)>10 万小时,远超光学编码器的 5 万小时寿命;IP67 防护等级(配合封装设计)可抵御粉尘、油污侵蚀,在机床、化工设备等恶劣环境中稳定工作;
安装容错降低集成难度:磁环与芯片安装间隙可放宽至 0.5~2mm,径向偏心容忍度≤0.2mm,大幅降低伺服电机装配时的对中要求,批量生产合格率提升 20% 以上。
在 FOC 控制架构中,MT6813 提供的绝对角度数据是坐标变换的核心依据。通过实时采集转子磁极角度(θ),配合三相电流采样,实现 Clarke 变换与 Park 变换的精准解耦,使直轴电流 Id 与交轴电流 Iq 独立调控,显著提升伺服电机的动态响应与转矩控制精度。
二、系统集成方案:硬件设计与接口适配
MT6813 在伺服电机系统中的集成需兼顾信号传输、机械安装与电磁兼容设计,确保位置数据的稳定可靠:
接口适配方案:支持 I²C、3 线 / 4 线 SPI、PWM 及 DAC 模拟输出四种模式,在伺服控制中优先采用 SPI 接口(最高速率 10MHz),与 STM32、DSP 等主控芯片实现高速通信,数据更新率达 10kHz,满足电流环(16kHz)、速度环(8kHz)、位置环(4kHz)的三闭环控制时序要求;
机械安装设计:选用径向充磁多极磁环(推荐 8 对极或 16 对极),磁环表面磁场强度≥10mT,与 MT6813 芯片保持 0.5~1mm 最优安装间隙;采用双轴承定位结构,控制径向跳动≤0.1mm,减少磁场畸变导致的测量误差;
电磁兼容优化:硬件层面采用磁屏蔽罩和 RC 滤波电路(0.1μF 电容 + 1kΩ 电阻),PCB 布局分离模拟与数字区域;软件层面启用内置 EMC 滤波算法,满足 EN 55032 Class B 电磁兼容标准,抵御伺服驱动器产生的高频干扰。
典型集成架构为:MT6813IC 采集转子位置信号→通过 SPI 接口传输至主控芯片→主控执行 FOC 算法生成控制信号→驱动模块控制电机运转,形成完整的闭环控制链路。
三、性能优化策略:误差补偿与校准技术
为进一步提升伺服系统定位精度,需结合 MT6813 的硬件特性实施多维度优化:
双阶段校准机制:第一阶段 “启动强拖校准” 强制电机低速旋转至 d 轴对齐,锁定初始电角度偏移 Δθ₀;第二阶段 “正反转线性标定” 采集多组原始码值与理论角度的映射关系,构建 128 点查表修正数组,通过插值补偿将非线性误差降至 ±0.05° 以内;
温度补偿算法:基于 - 40℃~125℃范围内的温漂特性,建立分段线性补偿模型,通过内置温度传感器实时采集环境温度,动态修正角度偏差,全温范围误差控制在 ±0.8° 以内;
信号滤波处理:采用一阶低通滤波(截止频率 1kHz)消除高频噪声,结合卡尔曼滤波算法融合角度与速度数据,在电机启停、负载突变等动态场景中,角度抖动幅度降低 60%。
某工业伺服电机改造项目中,通过上述优化策略,MT6813 的实测静态线性度达 ±0.08°,动态误差≤±0.15°,完全达到高端伺服系统的性能要求。
四、实际应用案例与工程价值
MT6813 已在多个伺服电机应用场景中实现成功落地,展现出显著的技术优势与经济价值:
工业机床伺服电机:在数控车床进给伺服系统中,MT6813 替代传统光学编码器,通过 SPI 接口与三菱 PLC 通信,电子齿轮比设置为 131272/1000,实现 0.1mm / 脉冲的定位精度,机床加工件尺寸误差从 ±0.03mm 缩小至 ±0.01mm,合格率提升 9%;
机器人关节电机:某四足机器人关节电机采用 MT6813 作为位置反馈单元,配合 FOC 控制算法,重复定位精度达 ±0.05°,在负载突变(200g~2kg)场景下恢复时间<10ms,运动平顺性显著优于霍尔传感器方案;
自动化设备伺服系统:在锂电池极片裁切机的伺服电机中,MT6813 耐受 85℃高温与 10g 振动,连续运行 6 个月无故障,角度测量误差稳定在 ±0.1° 以内,替代进口光学编码器后,单台设备成本降低 40%。
结语
MT6813 通过 AMR 技术实现了伺服电机位置检测 “精度、可靠性、成本” 的三角平衡,其 14 位测量能力、高速响应特性及恶劣环境适应性,完美匹配中端伺服系统的核心需求。在国产化替代加速的趋势下,该芯片凭借 Pin-to-Pin 兼容进口型号、多接口灵活适配、集成难度低的优势,正逐步取代传统传感器方案。未来通过优化磁环设计与算法迭代,有望将角度误差进一步降至 ±0.05° 以内,拓展至高端伺服电机及医疗设备电机等更高精度场景,为伺服控制系统的性能升级提供核心支撑。
(全文约 1480 字)
审核编辑 黄宇
-
传感器
+关注
关注
2577文章
55445浏览量
793725 -
伺服电机
+关注
关注
88文章
2200浏览量
61532
发布评论请先 登录
MT6813 磁角度传感器芯片核心应用场景技术解析
基于MT6813的云台电机角度闭环控制系统设计与应用-艾毕胜电子
MT6813 基于 AMR 技术的 14 位绝对角度测量系统设计与实现

泰科电子制动电机位置传感器荣膺2025制尚奖
MT652x 多维感知赋能汽车级应用,国产磁性角度传感器芯片
CW32电机控制基础--无刷电机无位置传感器的转子位置检测技术




评论