 借助工业以太网对KUKA C4机器人进行PN电源管理(W)
借助工业以太网对KUKA C4机器人进行PN电源管理(W)

借助工业以太网进行电源管理,通过 PROFINET 进行电源管理

借助CapCtrl.xml 进行的工业以太网接口配置不是PROFIenergy的函数并且必须分开考虑。必须始终只配置PROFIenergy 或CapCtrl.xml。如果同时配置这两项,将导致异常效果和故障!
以下信号可供用于激活或停用各种节能模式以及识别机器人控制系统的状态。
这些功能只能在 EXT 运行模式下执行,而不能在 T1 或 T2 下执行。
无法将 PROFIenergy 与电源管理组合。
电源管理指的不是 PROFIenergy。
输入字节 0
| 0 | AB |
驱动总线 0 = 接通驱动总线,条件:HIB = 0 和 KS = 0 1 = 关断驱动总线,条件:HIB = 0 和 KS = 0 |
| 1 | HIB |
休眠 0 = 无功能 1 = 使控制器休眠,条件:AB = 0 和 KS = 0 |
| 2 | KS |
冷启动 0 = 无功能 1 = 使控制器冷启动,条件:AB = 0 和 HIB = 0 |
输出字节 0
| 0 | AB |
驱动总线 0 = 驱动总线已接通 1 = 驱动总线已关断 |
| 1 | BBS |
机器人控制系统的待机运行状态 0 = 机器人控制系统尚未做好运行准备 1 = 机器人控制系统已经准备就绪 |
借助 CabCtrl.xml 进行电源管理.
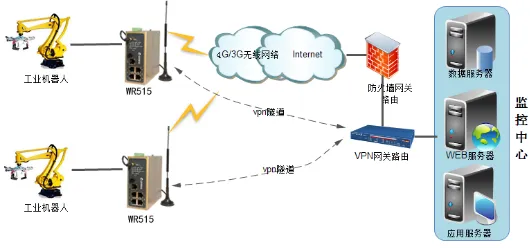
一个上一级的 PLC 可通过工业以太网开、关 KR C4 的驱动总线或冷启动或以休眠方式启动控制器。对于通过CabCtrl.xml 进行的电源管理,为控制功能提供一个输入位,为反馈给上级 PLC 提供一个输出位。
须通过非安全区域 (02xxxx) 中的工业以太网电报共同传输这两个位。

通过CabCtr.xml 确定向量地址 (位偏移量)。在此必须注意,已计划预留的范围不能用于其它方面。
PROFIsafe 协议结构:

1.在PLC项目中,最多有2032个安全输入/输出端可供使用
2.PROFIsafe是标准PROFINET电报中的组成部分。
3.电报结构
a. 第 0 至 15 字节为安全输入
b. 第 16 至 269 字节为标准输入
c. 第 270 至 285 字节为 安全输出
d. 自第 286 字节起为标准输出
4.针对通过工业以太网进行的电源管理,规定的输入字节和输出字节通过正常的输入 / 输出范围传输.
操作步骤:
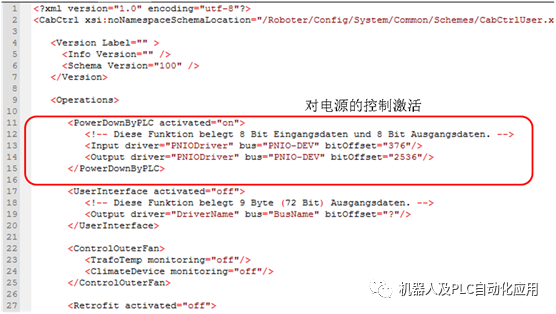
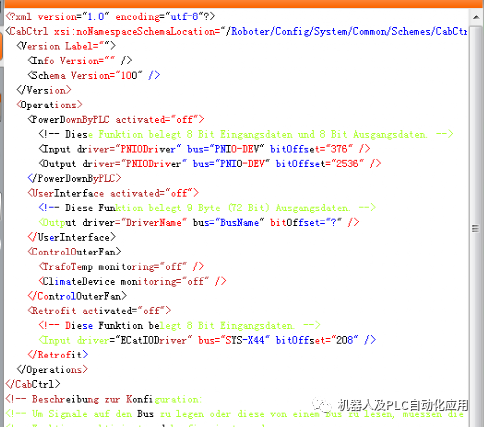
1.通过Windows平台打开以下文件:
C:KRCRoboterConfigSystemCommonCapCtrl.xml
2.调整
“On”激活电源管理
3.
(输入驱动程序=“PNIODriver”总线=“PNIO-DEV”bitOffset=“376”)
(输出驱动程序=“PNIODriver”总线=“PNIO-DEV”bitOffset=“2536”)
如图所示,接受PNIODriver和PNIO-DEV的值
4.计算bitOffset(示例)
位偏移量必须始终是八的倍数。
5. 在 KR C4 控制器上,应使用 02248 至 02256 的输入端
a. 02248 与字节偏移量 31相符。
b. 前面的 16 字节安全输入端 必须一起考虑进去
c. 也就是, 16 字节 + 31 字节 = 47 字节
d. 47 字节 与376 位相当
e. 在 位偏移量时,输入该值
6. 在 KR C4 控制器上,应使用 02248 至 02256 的输出端
7. 02248 与字节偏移量 31 相符
8. 286 个字节已由安全输入端、标准输入端和安全输出端占用
9. 也就是, 286 字节 + 31 字节 = 317 字节
10. 317 Byte 相应于 2536 Bit (位) 。
11. 在 位偏移量时,输入该值
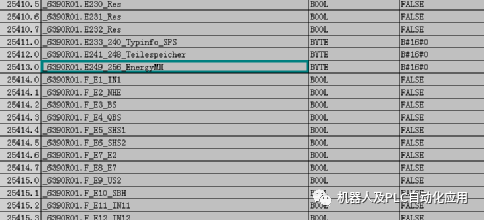
E249-E256ENERGYMM是机器人电源控制
责任编辑:PSY
原文标题:KUKA C4机器人的PN电源管理(W)
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
214文章
31649浏览量
224554 -
电源管理
+关注
关注
117文章
8738浏览量
148360 -
工业以太网
+关注
关注
10文章
694浏览量
43915
原文标题:KUKA C4机器人的PN电源管理(W)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
探索PEM3100系列30W以太网供电(PoE+)PD模块的卓越性能
Neway电机方案在机器人技术方面的优势
米尔RZ/T2H MPU支持支持多轴实时控制,助力工业以太网
解析LT8440:工业以太网APL端口的高效电源调节器
工业以太网的可靠之选:DP83822低功耗耐用型以太网PHY
DP83826:确定性、低延迟工业以太网PHY的卓越之选
Amphenol单对以太网(SPE)IP20连接器及电缆组件:工业以太网新选择
Amphenol 4 端口千兆以太网交换机:适用于下一代无人机、机器人和嵌入式应用
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
工业机器人联网通信解决方案
一文看懂PROFINET与工业以太网的核心区别




评论