 颗粒物传动的机器人关节的设计及实验测试
颗粒物传动的机器人关节的设计及实验测试

小颗粒物(particles,granular material)是我们生活中很常见的事物,工地上的沙砾,家中的大米,绿豆,还有咖啡豆,咖啡粉等,不胜枚举。颗粒物有着很多独特的性质,它们可以变得犹如岩石一般坚硬,也可以变得像液体一样四处“流动”。基于颗粒物的物理特性,香港大学的陈永华教授带领的研究团队提出了“颗粒物传动(particle transmission)”的概念,并基于“颗粒物传动“原理设计开发了“双足机器人关节”和“软体机械手”,两个研究成果均于去年发表在国际顶级刊物《IEEE机电一体化学报》(IEEE Transactions onMechatronics)。这种新的传动方法启发自液压或者气压传动,并且和后两者相比有着它独特的优势:1. 不需要专用的密封,不容易泄露;2. 对温度变化不敏感;3. 可以有刚度的大范围变化4. 吸收震动等。
1.颗粒物传动和它在机器人中的应用
颗粒物在我们生活中非常常见,家中储存的谷物豆类,咖啡豆咖啡粉,大街上的泥土沙砾,都属于颗粒物的范畴。讨论到颗粒物在机器人中的应用,就不得不提下面这个机器猫“机械手”。小编当初真的被这款用咖啡末和气球做的“抓手”所震惊和吸引到。今天先不展开讲述它的原理了,文末附有相关论文可以参考。
小编向大家介绍颗粒物在机器人中的另一个有趣并且有实用价值的应用,颗粒物在“流动”状态下可以代替液压和气动来作为传动介质,设计由颗粒物驱动的“双足机器人”和“软体抓手”。
类似机器猫手的”万能抓手”
液压和气压传动都是机器人中常见的传动方式,它是以流体(液体,气体)为工作介质进行能量传递和控制的一种传动方式,这种传动方式的优点是设备执行端的重量可以很轻,响应速度快,传输力大等。Boston dynamic的人形机器人Atlas采用的就是精妙设计的液压系统驱动28个关节,另外大家熟悉的软体抓手则利用了压缩气体驱动。
液压驱动和气动的例子
颗粒物是一种很特别的物质,虽然每一颗单拎出来都是固体,但是一群颗粒物在松散的状态下具有像液体一样的流动性。比如我们抓一把沙子,一把豆子,平摊手掌的话会从指缝流走。同时,如果对松散的颗粒物施加压力,那么颗粒物之间便会产生一种“阻塞(jamming)”效应,相互挤压,使得颗粒物整体的又呈现固体的状态。我们生活中常见的真空包装绿豆可以很好的展示颗粒物的特性。
真空包装的“阻塞”的绿豆和“流动”的绿豆
来自香港大学陈永华教授团队联想到了是否可以借助颗粒物的流动性,将它作为媒介,达到类似于液压传动或者气体传动的效果,从而进行动力的传递。应用颗粒物传动设计了两种机器人,行走机器人和软体抓手,两篇文章均于去年发表于机械工程顶刊《IEEE机电一体化学报》(IEEETransactions on Mechatronics)。
颗粒物传动设计的基本原理
当然仅仅能够模拟液压或者气压传动的效果还不够,研究者分析了颗粒物传动的一些特点:
1. 和气体液体传动相比,颗粒物传动不需要过于严格的密封,因此可以简化传动结构的设计。
2. 通过“阻塞(jamming)”效应,颗粒物传动可以进行刚度变化。
3. 颗粒物对于温度和压强的敏感程度低,更适用于严苛的环境。
4. 颗粒物传动可以起到减震的效果。
研究者们设计了两款具体的应用,来验证颗粒物传动这种想法的可行性,包括一个“小型双足机器人”和“软体机械手”。在这两款设计中,均采用了颗粒物传动的设计。今天小编就帮大家解读一下颗粒物传动是如何被应用于设计这两种机器人系统的。
颗粒物传统设计的双足机器人和软体抓手
我们可以先看一下颗粒物驱动的这两个应用的展示,下一部分会带大家了解具体的设计。文末附有相关论文的题目,链接,以及完整版视频。
颗粒物传动关节设计
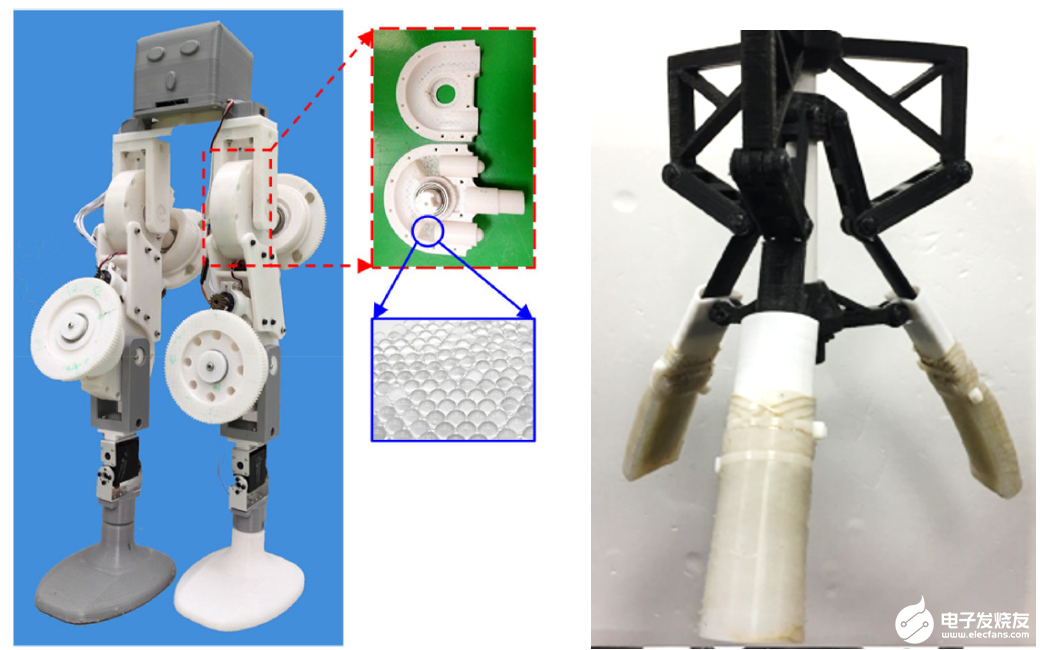
颗粒物传动的机器人关节
呆萌的双足机器人
颗粒物传动的软体抓手抓取
2. 颗粒物传动的应用设计及实验测试
2.1颗粒物传动的机器人关节的设计
如果将颗粒物填入一段封闭的腔体中,在一侧给一个输入力,那么力可以通过颗粒物传到到另一侧。研究者给出了四种典型的设计方案,除去最基本的直线传动方案,通过不同的结构设计,颗粒物传动还可以实现90度,180度,以及直线到旋转运动的传动。
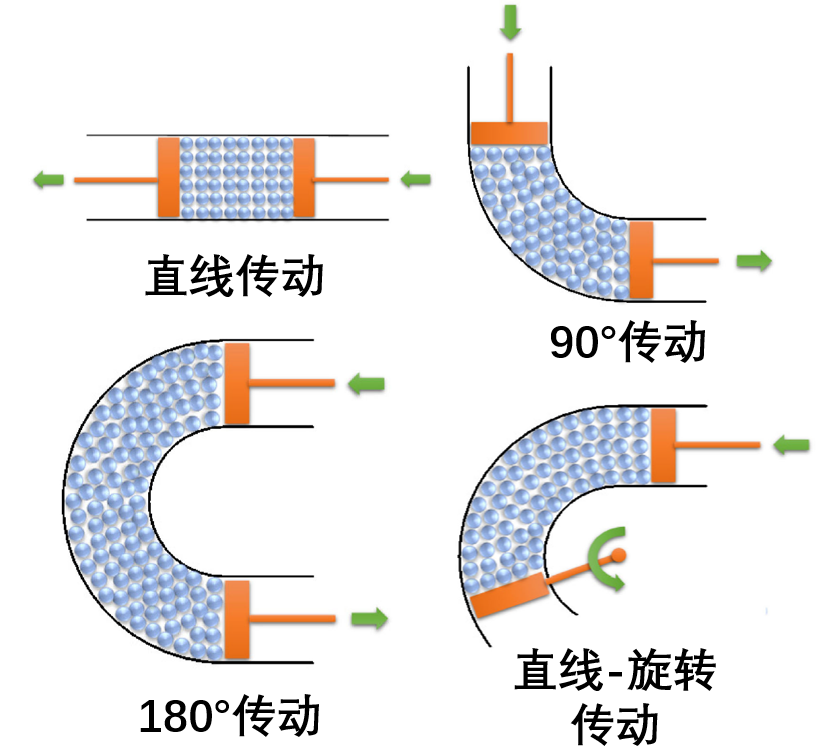
颗粒物传动的几种变化
颗粒物传动比通常状态下是小于1的,因此具有一定的缓冲效果,能够减少输出端的压力,达到柔顺输出的效果。通过实验测试得知,颗粒物传动比随着输入力的速度增加而增大,同时,通过不同角度的传动测试,颗粒物传动受到重力的影响比较小。
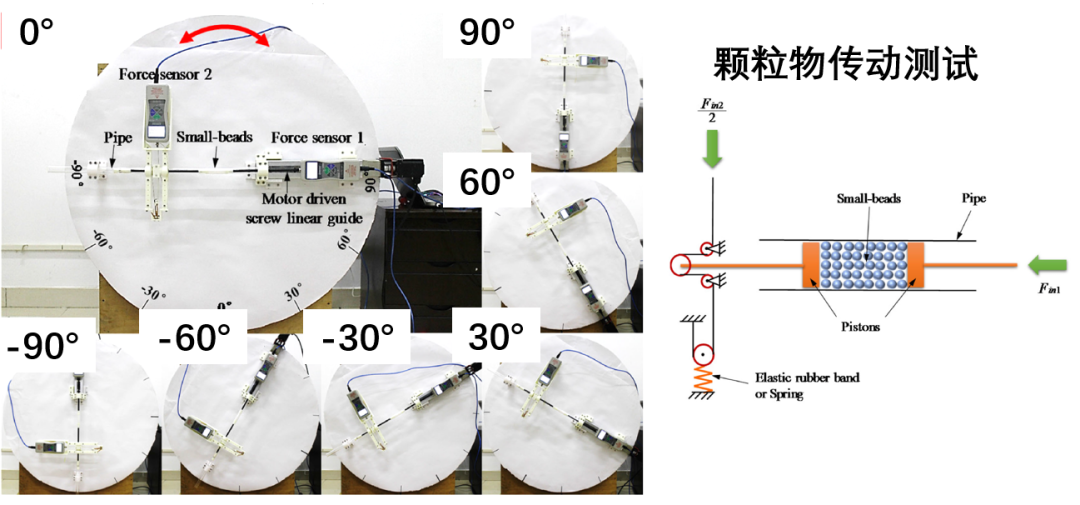
颗粒物传动的测试
研究者设计的颗粒物传动关节如图,在一个U形管中填入一定的颗粒物(例如小玻璃珠),然后用两个活塞密封它。活塞连接到一个输出轴。两个活塞由一个输入的凸轮进行周期性的上下运动,从而带动输出轴旋转,这个旋转运动即可以被用作机器人的关节。
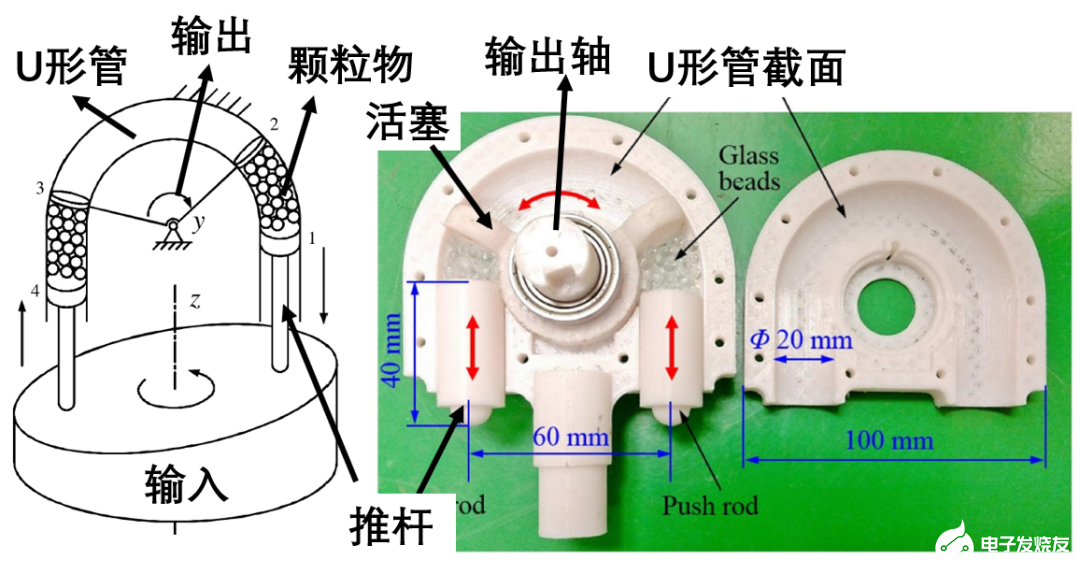
基于颗粒物传动的机器人关节的设计
当颗粒物传动设计的关节在遇到外界的大冲击的时候,颗粒物之间会被互相挤压,“流动”的颗粒物便会切换为“固态”,从而达到阻塞(jamming)-自锁(self locking)的效果。研究者认为这种效应可以帮助机器人关节抵御外界的冲击,并且提升关节的刚度。研究者们利用颗粒物传动关节设计了一个双足行走机器人,简单展示了这种传动方式应用于机器人的可行性。
双足机器人行走步态
2.2颗粒物传动的软体抓手
颗粒物传动的另一个应用便是软体抓手了。传统的气动软体手指由压缩气体驱动,基本原理就是,气囊的底部是限制膨胀层,上面是弹性层,因此在气压的增大作用下,软体手指会朝着限制层弯曲。假设把一个个的气体分子具化,增大的压强可以看作是气体分子对于气囊内壁的冲击力增大了。
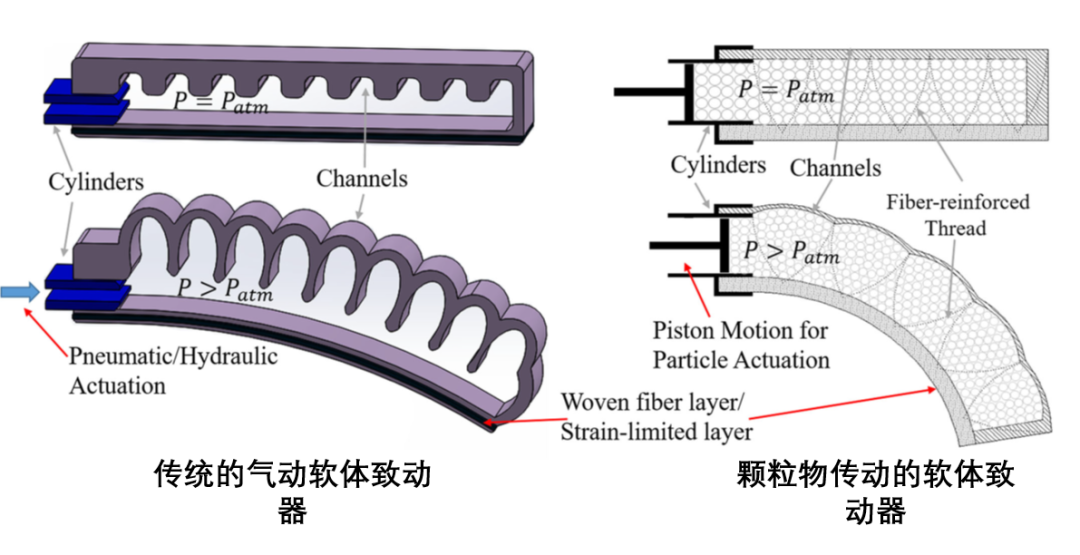
颗粒物传动的软体致动器原理
基于类似的原理,当把细小的颗粒物作为介质用外力推入具有相同设计的弹性气囊中,用一个外力去不断推动外界的颗粒物进入气囊,随着颗粒物的体积的增加,气囊壁收到的颗粒物的压力越来越大,由此便会产生像是气动软体手指一样的弯曲。但是相比于气动,颗粒物驱动的软体手指不需要很严苛的密封,并且随着弯曲角度的增加,气囊壁对颗粒物的反作用压力也逐渐增大,从而颗粒物会发生阻塞效应(jamming),软体手指的刚度也会成倍的增加。
通过一系列的抓取实验测试,颗粒物驱动的软体抓手也有着自适应的抓取能力,可以抓取多种物体。同时,由于颗粒物的阻塞效应使得软体手指在最终状态的刚度变化比较大,因此这款软体抓手可以抓取比较重的物体。
颗粒物传动的软体抓手抓取
为了更准确的探讨颗粒物传动的软体手指刚度变化情况,研究者利用三种不同的媒介进行了测试,即空气,水和颗粒物。利用活塞推进相同体积的介质,可以看到,随着挤压体积的增加,在后期颗粒物传动的软体手指的刚度要远远优于水和气体驱动的。
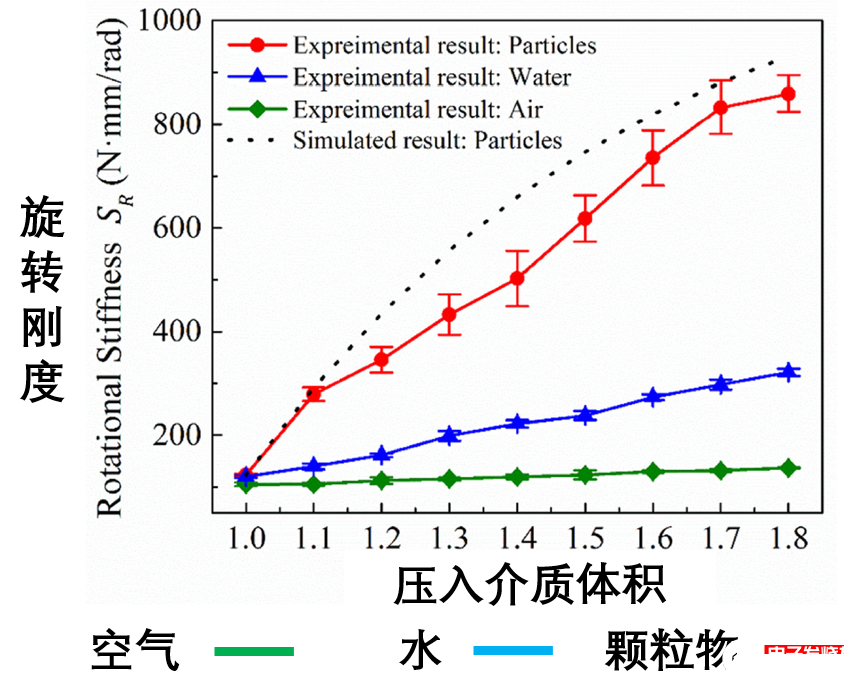
颗粒物传动软体手指的刚度和水,气体的比较
3. 总结和展望
把颗粒物当作水,当作气体来作为传动介质的想法真的很充满想象力,这也正是科学研究的魅力,透过现象看本质,就可以发现一些原本毫无关联的事物之间竟然有着某种底层的联系。
善于思考的研究者们基于一些非常基础的物理现象,比如今天所探讨的颗粒物的流动性和阻塞效应,可以开发设计出具有创新的结构,甚至有一些超过传统方法的优点。
责任编辑:pj
-
机器人
+关注
关注
213文章
31444浏览量
223669 -
香港
+关注
关注
0文章
19浏览量
13670 -
气体
+关注
关注
0文章
63浏览量
16087
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
春晚机器人跳舞背后:精密关节连接器的“丝滑”秘密

AWE 2026 | 奥迪威颗粒物感应方案:以粒径感知赋能智能清洁设备

基于兆易创新GD32H75EYMJ7 MCU的机器人GaN关节驱动解决方案

突破三重质量挑战,守住人形机器人动作精确性与寿命

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起

人形机器人一体化关节:如何解决高动态工况下的“测不准”?

高性能人形机器人关节模组选型的关键技术要素


集成多摩川磁性编码器的伺服电机与机器人关节设计创新
集成MT6701磁编芯片的机器人关节模块化设计与驱动优化

【一分钟教程】用ZMC600E实现关节机器人±180度精准转动




评论