 人形机器人一体化关节:如何解决高动态工况下的“测不准”?
人形机器人一体化关节:如何解决高动态工况下的“测不准”?

本文导读
GB/T 43200-2023标准对机器人关节测试提出了高精度与高动态要求。本文针对测试中存在的时序误差与动态捕捉难题,解析电气性能验证的技术难点,提供致远仪器PA系列功率分析仪的机电同步采集与测试方案。
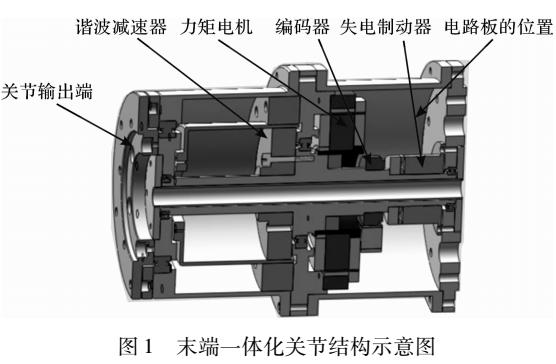
一体化关节(Joint Module)作为人形机器人的核心驱动单元,其集成度直接决定整机的运动性能。
随着GB/T 43200-2023《机器人一体化关节性能及试验方法》的实施,行业建立了明确的技术规范。传统的测试方法在面对关节的高集成“黑盒”特性时,常面临效率计算偏差与动态信号捕捉困难两大挑战。
电气性能测试的关键挑战
电气性能是关节动力输出的底层保障,测试需严格遵循GB/T 43200-2023的环境条件(温度15℃-35℃、相对湿度25%-75%)与设备精度要求(功率分析仪准确度不低于0.5级)。依据GB/T 43200,电气性能测试不再是简单的稳态记录,而是对测试系统同步性与带宽的要求:1.额定功率与效率测试:
- 国标要求:在额定工况下,同步采集输入电参量(U,I)与输出机械参量(T,n),按公式ɳ=(2π﹒nN﹒TN)/(60﹒U﹒I)×100%计算,且标准规定需连续测试3次并取平均值。
- 技术难点:传统“万用表+扭矩仪”的分散测试方案,因数据采集存在毫秒级时差,导致输入与输出功率计算不匹配。三次测试结果波动大,难以满足标准对数据一致性的要求。
2.极限动态工况:瞬态过载捕捉
转矩过载能力:针对“瞬时最大转矩”测试,标准要求固定输出端并测量峰值电流。这要求测试仪器必须具备高采样带宽,才能准确记录短时过载的真实数值。
- 功率密度与可靠性:在“最高转速”测试中,需在空载下以最高速正、反方向连续运转2min。测试系统需在持续高频信号下保持无漂移记录,以支撑功率密度(KP=PN/m)核算及结构可靠性验证。

图1试验装置
辅助性能测试与可靠性验证
除核心电气指标外,标准中规定的可靠性测试指标还包括:
机械性能:反向启动转矩(需正反向各测5次取最大值)及背隙(±3%额定转矩下的角度偏差);
控制性能:绝对定位精度及稳态运行下的转速波动系数;
环境适应性:参照GB/T 39266(振动/冲击)与GB/T 10069.1(噪声)执行物理环境耐受度测试。

图2 许用弯矩载荷试验装置
测试方案优化:PA功率分析仪的应用
针对GB/T 43200-2023提出的多参量同步与0.5级精度要求,致远仪器PA系列功率分析仪拥有0.05%以上的测量精度,可支持7通道电压电流和扭矩转速采集,提供符合国标要求的高精度同步测试方案:
1.机电同步采集,支撑高效能效评估
测试架构:设备支持单机同步接入电源输入的电压电流信号,以及负载输出的转矩转速信号;
方案优势:从物理层实现了电-机信号的同源采集,消除分散仪器间的时序偏差。无需人工对账,即可直接输出精准的效率ɳ计算结果,并支持自动化绘制关节在不同负载下的效率曲线(Efficiency Curve),大幅降低人工与时间成本。
2.动态波形分析,匹配复杂瞬态需求
瞬态捕捉:针对标准中的“瞬时最大转矩”及阶跃响应测试,设备的高带宽特性可精准捕获启动瞬间的峰值电流与转速突变,真实还原关节的动态性能;
故障诊断:支持长时记录转速与扭矩的瞬时波动波形,帮助工程师透视数据细节,快速定位齿轮磨损、机械装配松动等潜在传动异常。
3.多维电能质量评估,前置兼容性验证
环境模拟:系统内置谐波检测及三相平衡度分析功能,可配合可编程电源模拟电网线路故障工况;
EMC评估:在零部件测试阶段,即可验证关节在复杂供电环境下的电气稳定性与电磁兼容性(EMC),有效降低后期整机联调的整改风险。

图3 电机变频研发与测试
结 语
当一体化关节成为人形机器人进化的关键变量,测试手段也必须随之升级。准确量化每一份能量的转换,严格执行每一次国标的考量,致远仪器愿以“测得准、测得快”的高精方案,助力国产机器人核心部件的高质量落地。

-
测试
+关注
关注
9文章
6505浏览量
131784 -
人形机器人
+关注
关注
7文章
1102浏览量
18572 -
机器人关节
+关注
关注
0文章
32浏览量
385
发布评论请先 登录
伺服电动缸在人形机器人中的应用
人形机器人关节扭矩传感器的详细应用场景及解决方案
为什么人形机器人更讨人喜欢?

专为人形机器人应用打造,助力具身智能行业发展,泰科机器人关节模组持续升级!

山田光学:一体化机芯在机器人领域的创新应用
国产一体化关节模组:突破关键,赋能机器人生态



评论