 激光雷达的标定_激光雷达的功能
激光雷达的标定_激光雷达的功能

激光雷达的标定
1、旋转
三个角度,旋转角、俯仰角、横摆角
可以涉及到投影,投影是平行投影。
这里倾角会有不同,但是投影的形状是一定的。三角形投影下来,还是三角形。
人为的倾斜雷达,他们测量得到的距离是相对于雷达坐标系的,而并不是相对于车体坐标系的。
坐标系:笛卡尔坐标系

横摆角矫正:xy平面
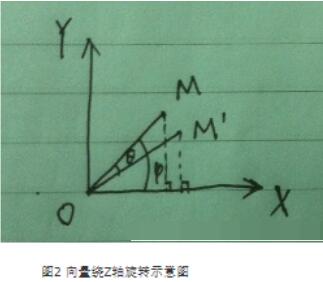
xx=xcosa+ysina
yy=ycosa–xsina
俯仰角矫正:yz平面
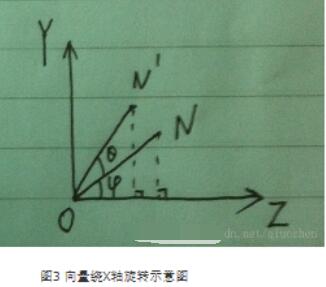
yy=ycos+zsina
zz=zcosa–ysina
旋转角矫正:xz平面
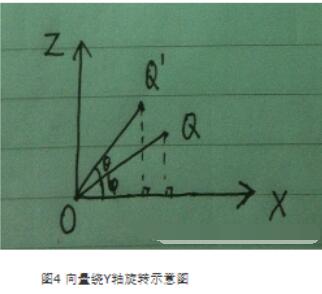
xx=xcosa-zsina
zz=zcosa+xsina
合起来就是一个四维的旋转矩阵。
2、平移
xx=xx+w;
yy=yy+h;
zz=zz+z;
通过以上6个参数:三个角,三个偏移,就可以解决多线激光雷达标定问题。
激光雷达的功能
激光雷达具有高精度电子地图和定位、障碍物识别、可通行空间检测、障碍物轨迹预测等功能。
(1)高精度电子地图和定位利用多线束激光雷达的点云信息与车载组合惯导采集的信息,进行高精度电子地图制作。无人驾驶汽车利用激光点云信息与高精度电子地图匹配,以此实现高精度定位。
(2)障碍物识别利用高精度电子地图限定感兴趣区域(ROI)后,根据障碍物特征和识别算法,进行障碍物检测与识别。
(3)可通行空间检测利用高精度电子地图限定ROI后,可以对ROI内部(比如可行驶道路和交叉口)点云的高度及连续性信息判断点云处是否可通行。
(4)障碍物轨迹预测根据激光雷达的感知数据与障碍物所在车道的拓扑关系(道路连接关系)进行障碍物的轨迹预测,以此作为无人驾驶汽车规划(避障、换道、超车等)的判断依据。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达
+关注
关注
982文章
4540浏览量
197066
发布评论请先 登录
相关推荐
热点推荐
自动驾驶激光雷达应如何进行标定?
[首发于智驾最前沿微信公众号]在自动驾驶的技术架构中,激光雷达通过发射激光脉冲并接收反射信号,能够在复杂的物理世界中构建出高精度的点云地图。然而激光雷达在被安装到车身上后,并不是立刻就能“看清”世界

固态激光雷达参数以及避障视频
本帖最后由 jf_63660781 于 2026-3-27 14:23 编辑
1 产品概述
G90A-60传感器是一款线阵固态激光雷达。本产品基于三角测距原理,并配以相关光学、电学
发表于 03-27 14:14
车载激光雷达温度监控:NTC芯片的核心应用
车载激光雷达对温度的敏感性,决定了金电极NTC芯片在其内部的重要性。在NTC帮助下,激光雷达减少了波长漂移的情况出现,更好地保持其测距精度。且EXSENSE金电极NTC芯片独特的温度感知能力及可靠的电气特性,亦满足了车载激光雷达
自动驾驶激光雷达会伤害人体吗?
[首发于智驾最前沿微信公众号]随着自动驾驶技术的普及,激光雷达的使用也越来越多。现在我们很容易就看到搭载激光雷达的车辆在路上行驶。很多人听到“激光”后总会有一种担忧,害怕自动驾驶汽车上的激光雷

禾赛科技位列全球激光雷达行业专利第一
近日,Yole Group 旗下全球知名知识产权战略咨询机构 KnowMade 发布《汽车激光雷达专利全景分析 -2025 版》报告,(LiDAR for Automotive Patent

如何解决激光雷达点云中“鬼影”和“膨胀”问题?
[首发于智驾最前沿微信公众号]之前在聊激光雷达点云“鬼影”和“膨胀”的文章中( 相关阅读: 激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?),很多小伙伴都提到一个问题,那就是激光雷达点云中

禾赛科技与理想汽车续签激光雷达合作
今日,全球激光雷达领先企业禾赛科技(NASDAQ: HSAI;HKEX: 2525)正式宣布获得理想汽车全新一代辅助驾驶平台全系车型激光雷达定点,包括 L 系列、 i 系列和 MEGA。禾赛科技也将继续作为理想汽车的独家激光雷达
激光雷达为什么会出现串扰的问题?
[首发于智驾最前沿微信公众号]自动驾驶技术自提出以来,激光雷达就是非常重要的感知硬件,即便到现如今很多技术方案开始倾向于纯视觉时,依旧有很多的车企坚定地选择激光雷达。激光雷达常见的工作方式有脉冲型

华为,激光雷达第一! 车载激光雷达市场的“隐形冠军”
据国内资讯机构盖世汽车统计,在汽车市场,2025 年 1-8 月激光雷达供应商装机量排行榜显示,中国激光雷达市场呈现显著的头部集中效应,华为、禾赛科技、速腾聚创占据行业TOP 3,三家市场份额总和


FMCW激光雷达,加速落地工业场景
电子发烧友网综合报道 FMCW激光雷达虽然在车载领域还未实现量产应用,但实际上在工业等领域,比如单点测距场景中已经实现落地。近期激光雷达厂商摩尔芯光正式发布全球首款FMCW球形激光雷达。这款革命性
SPAD席卷车载激光雷达市场
电子发烧友网报道(文/梁浩斌)上周我们报道了一款新推出的激光雷达ASIC方案,值得关注的是该方案中与ASIC搭配的传感器均选择了SiPM。当然从成本的角度来看,作为第三方的激光雷达ASIC方案
超酷的树莓派激光雷达扫描仪!
摘要这款DIY的PiLiDAR扫描仪项目利用树莓派进行激光雷达测绘。激光雷达通过发射激光来扫描周围环境,从而创建三维模型。该项目需要树莓派4、摄像头、电机以及激光雷达套件。你是否了解过

激光雷达(LiDAR)技术方案与工作原理全解析
在自动驾驶、智慧城市、机器人导航等众多前沿科技领域,激光雷达(LiDAR,Light Detection and Ranging)正扮演着愈发关键的角色。它凭借高精度、高分辨率的探测能力,为各类智能

自动驾驶激光雷达:原理、类型与应用梳理
1.什么是激光雷达 激光雷达LiDAR的全称为Light Detection and Ranging 激光探测和测距。 激光雷达的工作原理:对红外光束Light Pluses发射、




评论