 dfrobotDFLG6DOF 6自由度机械臂简介
dfrobotDFLG6DOF 6自由度机械臂简介

一款小型、性价比较高的6自由度机械臂


简介
机械臂、机械手相信大家都不陌生了如医院里的手术机械手、工厂里的工业机械手,但其庞大的身躯和高额的售价,使我们爱好者望而却步,如今DFRobot开发了一款小型廉价的6自由度机械臂,希望能圆大家一个玩机械手的梦!
DFLG6DOF机械手由6个微型伺服电机(舵机)组成,分别对应于臂、肘、腕(2个自由度)、张合5个关节和1个旋转底座,每个关节可在一定范围内运动,底座可以实现左右90度旋转。通过上位机控制软件给舵机控制器发送控制指令,从而实现机械臂在空间中的精确作业。在机械臂上安装摄像头同时将机械臂安装到移动平台上,即可实现远程无线可视作业。总而言之这是一套非常不错的机器人演示教学平台和DIY套件。
舵机可以直接接插在arduino IO扩展板或者Romeo 机器人主控器上,直接使用arduino的servo库,即可轻松驱动舵机,实现机械臂的控制。还可以搭配我们的舵机驱动板,配合专门的上位机软件,可以快速入门自动化控制。Arduino的神奇之处在于多样化的扩展设备和示例代码,在该平台上运作的设备都非常容易上手。
注意事项:
1. 本套件以散件的形式提供,需要自行组装。有完整的组装视频,您不必担心装不上的问题。
2. 控制器推荐:威龙24路舵机控制器。它是DFRobot出品的高性能、专业舵机控制设备。
技术规格
工作电压:4.8~7.2 V
最大负载:500 g
工作电流:3A@5V (max)
接口类型:XH2.54-3P 接口
机械臂长度:280 mm
机械臂高度:340 mm
重量:1096 g
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
嵌入式主板
+关注
关注
7文章
6107浏览量
37220 -
DFRobot
+关注
关注
4文章
1166浏览量
12936
发布评论请先 登录
相关推荐
热点推荐
ADIS16407十自由度惯性传感器的全面解析
ADIS16407十自由度惯性传感器的全面解析 在电子设计领域,惯性传感器是许多应用的核心组件。今天,我们要深入探讨Analog Devices公司的ADIS16407十自由度惯性传感器,它集成了三
ADIS16448:紧凑精密10自由度惯性传感器的技术剖析与应用指南
ADIS16448:紧凑精密10自由度惯性传感器的技术剖析与应用指南 在电子工程领域,惯性传感器是众多应用中不可或缺的关键组件。今天我们要深入探讨的是一款紧凑且精密的10自由度惯性传感器
ADIS16445:高精度六自由度惯性传感器的卓越之选
ADIS16445:高精度六自由度惯性传感器的卓越之选 在当今的工业系统中,精确的多轴惯性传感对于平台稳定、导航和机器人等应用至关重要。ADIS16445作为一款紧凑、精密的六自由度惯性传感器,为
ADIS16334:六自由度惯性传感器的卓越之选
ADIS16334:六自由度惯性传感器的卓越之选 在电子工程领域,惯性传感器是实现精确运动测量和控制的关键组件。ADIS16334作为一款低剖面、六自由度的惯性传感器,凭借其出色的性能和丰富的功能
KMX62:6自由度惯性传感器系统的全面解析
KMX62:6自由度惯性传感器系统的全面解析 在电子设备不断发展的今天,惯性传感器的应用越来越广泛。Kionix的KMX62作为一款6自由度惯性传感器系统,以其独特的性能和丰富的功能,

高压功率放大器在超声电机性能测试与闭环实验中的应用
实验名称:两自由度超声电机性能测试与闭环控制实验 研究方向:压电驱动技术,两自由度超声电机的设计、机电耦合建模、性能测试及闭环控制研究 实验目的:本实验为验证基于纵振和弯弯复合振动的两自由度超声电机

复合机器人机械结构设计与创新:智能制造的前沿技术与发展趋势
:复合机器人机械结构设计的核心技术 1.1 多自由度设计与灵活性提升 多自由度(DOF)设计是复合机器人机械结构中最为关键的技术之一。通过增

SCH16T-K01:高性能6自由度传感器的技术剖析与应用指南
的SCH16T-K01传感器便是这样一款值得关注的产品,它集成了6自由度(6-DOF)的XYZ轴陀螺仪和XYZ轴加速度计,为各类应用提供了精确的运动和姿态测量解决方案。 文件下载: Murata
人形机器人市场火爆!雷赛智能重磅推出“20自由度”灵巧手方案
63.39亿元;到2035年中国机器人市场规模将突破3000亿元,复合增长率高达62.6%。 灵巧手是人形机器人中成本最高的核心部件之一,比如特斯拉 Optimus 的 22 自由度灵巧手,宇树科技发布的 Unitree Dex5 灵巧手,单手具备 20 自由度。 雷赛智
如何理解6 DOF ?
6DOF是6DegreesofFreedom的缩写,中文翻译为六自由度。这是一个在机器人、航空航天、虚拟现实(VR)、增强现实(AR)和3D建模等领域非常核心的概念。它描述的是一个刚体在三

多自由度云台控制系统赋能安防监控的智能巡检与目标锁定
的关键技术支撑。通过将先进的机械结构与智能算法相结合,多自由度云台为现代安防监控带来了革命性的巡检效率和目标追踪能力。
不到万元!智元机器人高自由度灵巧手做到了
16 个自由度,拥有 400 + 触点力控与防夹设计;专业款共 19 个自由度,重量为 750g,单指最大 20N 力及 0.1N 级多模态感知能力。 图源:智元机器人 OmniHand 灵动款

十字形多自由度超声电机接触分析模型研究
摘 要:十字形多自由度超声电机其动子绕X、Y轴旋转与绕Z轴旋转的驱动机理是不同的,根据弹性接触理论,对其进行了分别考虑,并建立了电机摩擦接触分析模型。利用建立的模型,对多自由度电机机械特性进行了估算
发表于 06-17 09:04
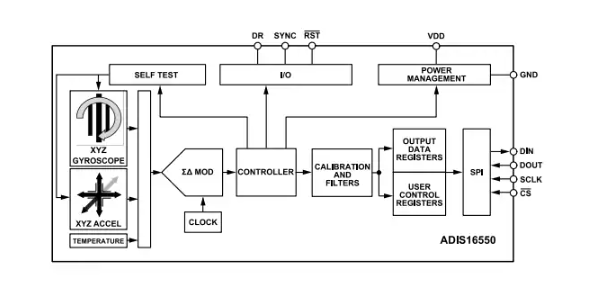
Analog Devices Inc. ADIS16550六自由度惯性传感器数据手册
Analog Devices ADIS16550六自由度惯性传感器是一款完整的惯性系统,内置一个三轴陀螺仪和一个三轴加速度计。ADIS16550中的每个惯性传感器都将业界领先的仅MEMS技术与信号调理相结合,具有经过优化的动态性能。



评论