 如何使用AVR微控制器和android设备制作机器人
如何使用AVR微控制器和android设备制作机器人

步骤1:所需零件

AVR开发板(或者自己动手制作) )
传感器(MQ-2,MQ-3等气体传感器; LM35温度传感器; IR传感器等)
燃烧器套件
直流电动机
LED的
HC-05蓝牙模块
步骤2:工作的详细说明
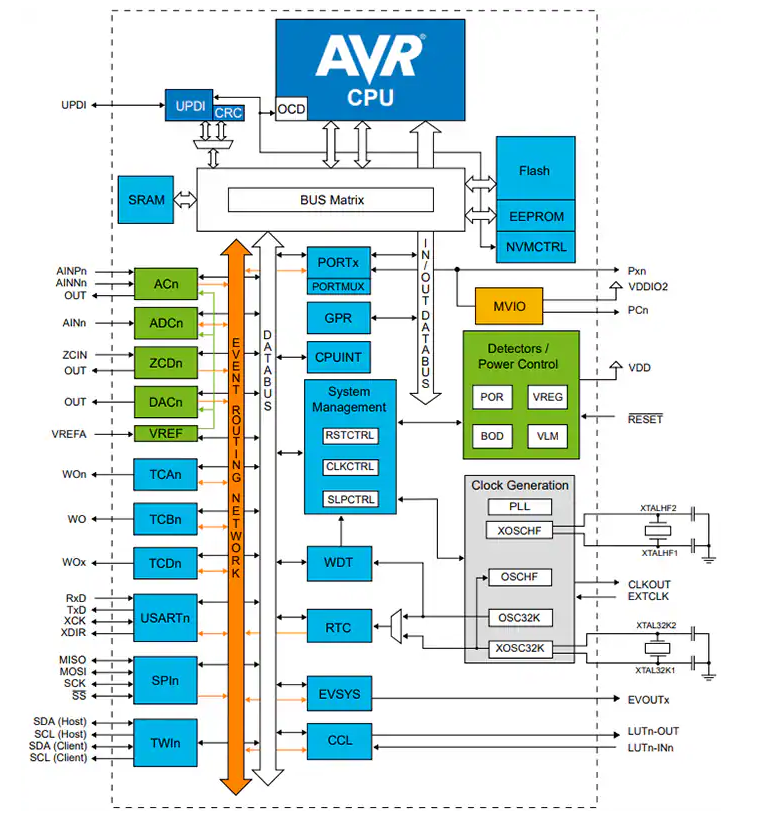
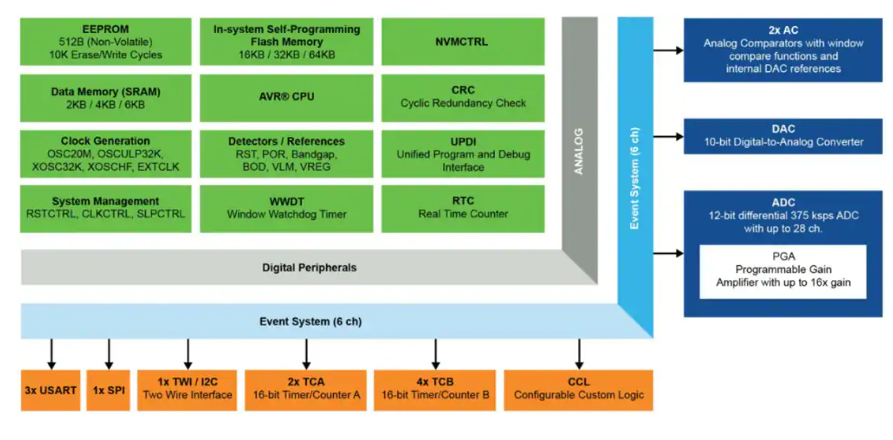
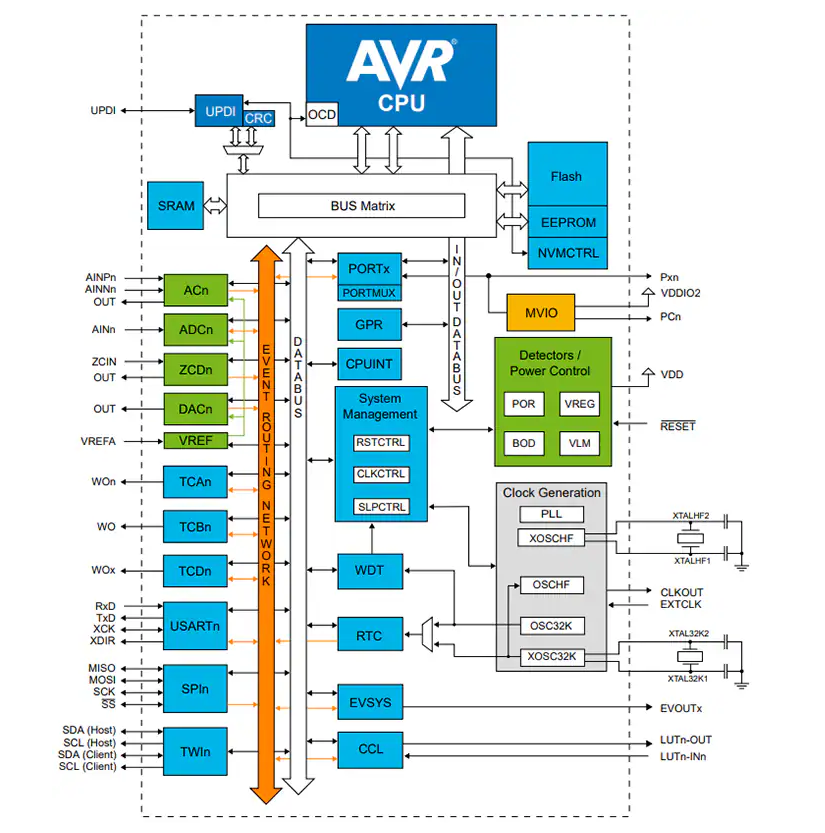
Atmega16是全世界嵌入式爱好者使用的著名微控制器,因为它具有内置的ADC和PWM等功能。
现在,如果我们将AVR的功能与android的功能结合起来,
我们可以使用AVR + ANDROID机器人的地方:
躺在床上时,房屋内的生活用品的运输
在厨房或任何可能发生气体泄漏的地方(使用MQ-2传感器)
温度检查和控制(使用lm35传感器)
L高度的亮度和强度控制(使用LDR传感器)
还有很多,每个人都趋向于找到这种易于使用的移动小工具的新用途,该小工具可以根据需要进行定制
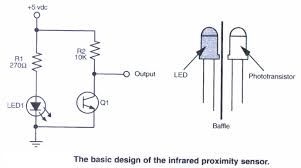
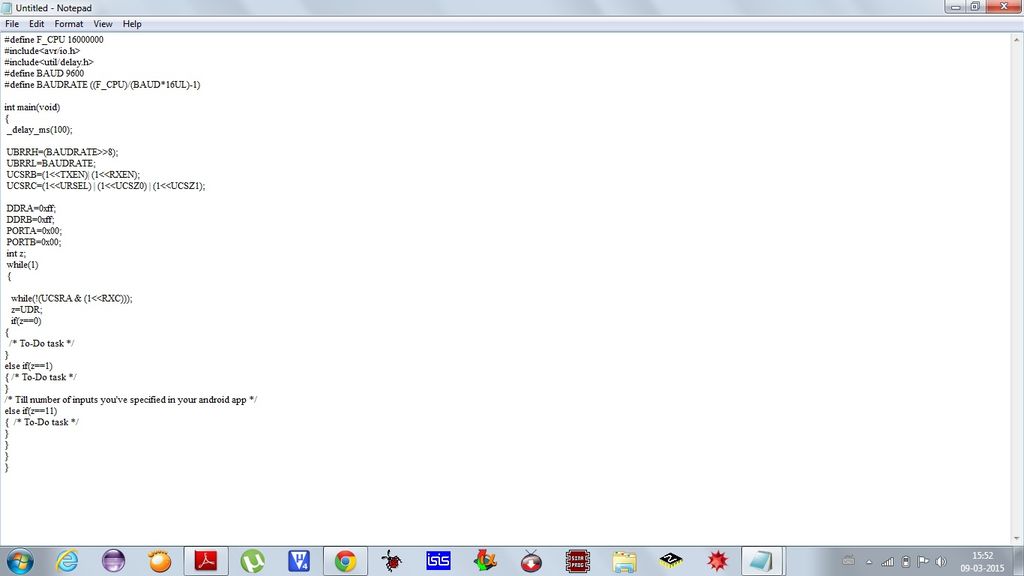
第3步:编程AVR
在此步骤中,我将告诉您如何连接传感器并使用内置ADC并执行所需的操作
首先,确定要使用的传感器,然后为其供电并连接到微型计算机的不同ADC通道-controller(有关引脚配置,请参见数据表)。
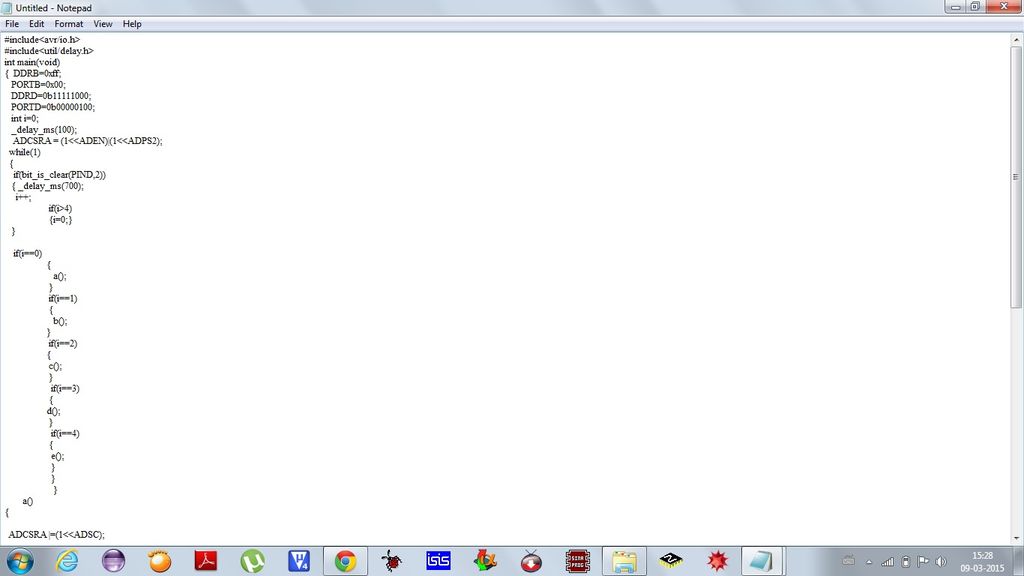
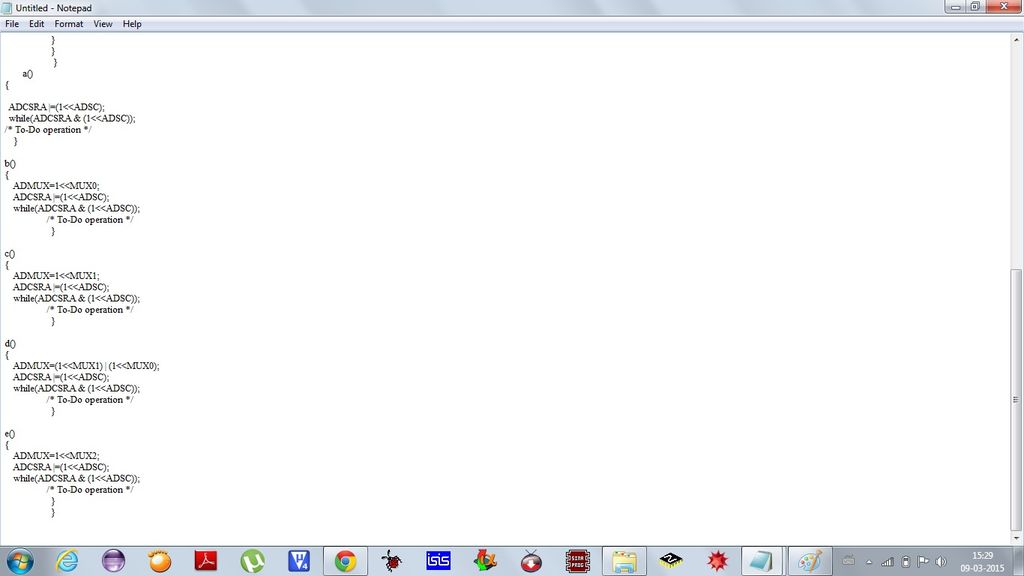
我已经附上了可用于对控制器进行编程的程序的屏幕截图。
保险丝位:
LFUSE = 0Xef;
HFUSE = 0Xc9;
EFUSE = 0Xff;
提供的代码用于手动运行,直到现在为止我还没有讨论android部分,因此您可以尝试在代码中提到的引脚处连接开关或进行相应的更改。
但是在最终确定之前要进行许多测试,以避免烧毁IC和传感器,请参考数据表以获取更多信息。您使用的传感器和控制器的IO值。
还要避免使用USB刻录机套件的电源,并希望通过您希望用于机器人的电池或适配器来提供电源,因为两种情况下的IO值往往不同。
步骤4:Android应用程序
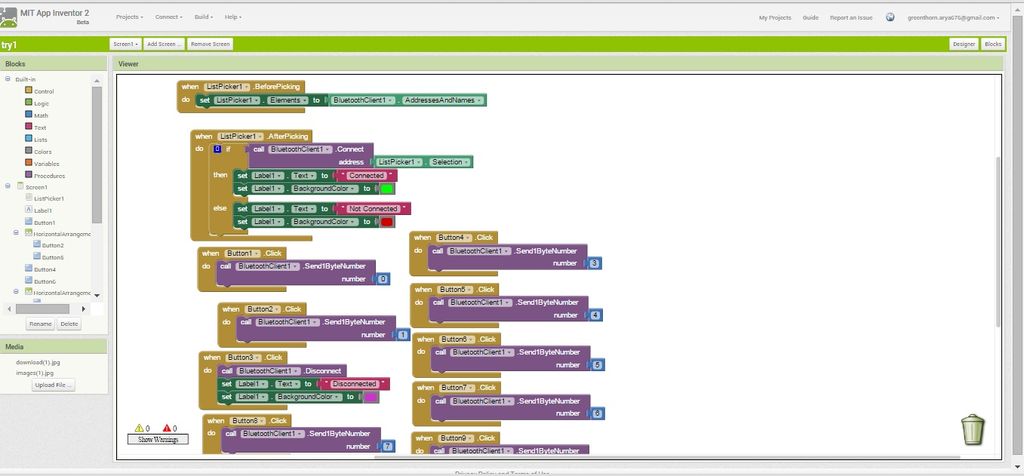
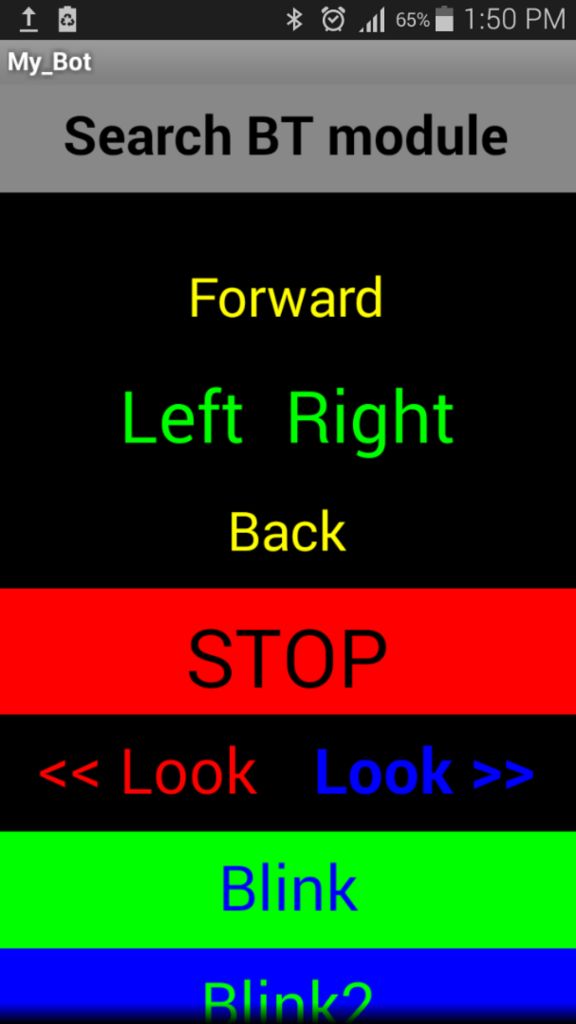
这是最简单的部分,或者是由MIT简化的。
我已经使用MIT应用程序发明者来制作应用程序(请参阅屏幕截图),因为这是创建有用的应用程序的最佳和最简单的方法,而无需对每个段进行单独编码。知识是使蓝牙应用程序通过HC-05模块与您的控制器进行通信的最有效,最简单的方法。
如果您要通过android设备控制机器人,请参考图片查看要进行的更改。
责任编辑:wv
-
机器人
+关注
关注
213文章
31435浏览量
223617 -
Android
+关注
关注
12文章
4035浏览量
134478 -
AVR微控制器
+关注
关注
0文章
20浏览量
6965
发布评论请先 登录
深入解析Atmel AVR XMEGA A3微控制器:特性、应用与设计考量
Atmel AVR XMEGA D微控制器深度解析
深入解析Atmel ATtiny24/44/84 8位AVR微控制器
深入解析Atmel AVR XMEGA B1微控制器:特性、应用与设计要点
深入解析Atmel ATtiny102/ATtiny104 8位AVR微控制器
深入剖析UC3D:高性能32位AVR®微控制器的技术魅力
AT90S4414/8515:8位AVR微控制器的技术解析
Atmel ATmega644P/V 8位AVR微控制器深度剖析
MCU微控制器,N32H47x高性能MCU机器人关节控制方案
Microchip AVR64DD14/20 微控制器:高集成度与低功耗的完美结合
Microchip AVR64EA28/32/48微控制器:高性能与低功耗的完美融合
Microchip Technology AVR32/16DD14/20微控制器 (MCU)数据手册
突破人形机器人控制器性能瓶颈:高效稳定的电容器解决方案





评论