 怎样为DSLR相机制作PanandTilt系统
怎样为DSLR相机制作PanandTilt系统

步骤1:3D打印


首先,您将需要使用16mm bearing.stl 文件3D打印 Pand倾斜马达安装座3。完成打印后,您可以取出2个轴承并将它们放入板底部的孔中,如上图所示。然后取一个黄铜支架,从板的另一侧将其锤入轴承约3mm。现在取一个M3螺栓并将其从底部拧入支架,如上图所示。拿起大齿轮,轻轻敲击顶部支架。使用板另一端的4个小孔连接步进电机。将小齿轮安装到电机轴上,然后将传动皮带放在两个齿轮上。
步骤2:底部轭部分

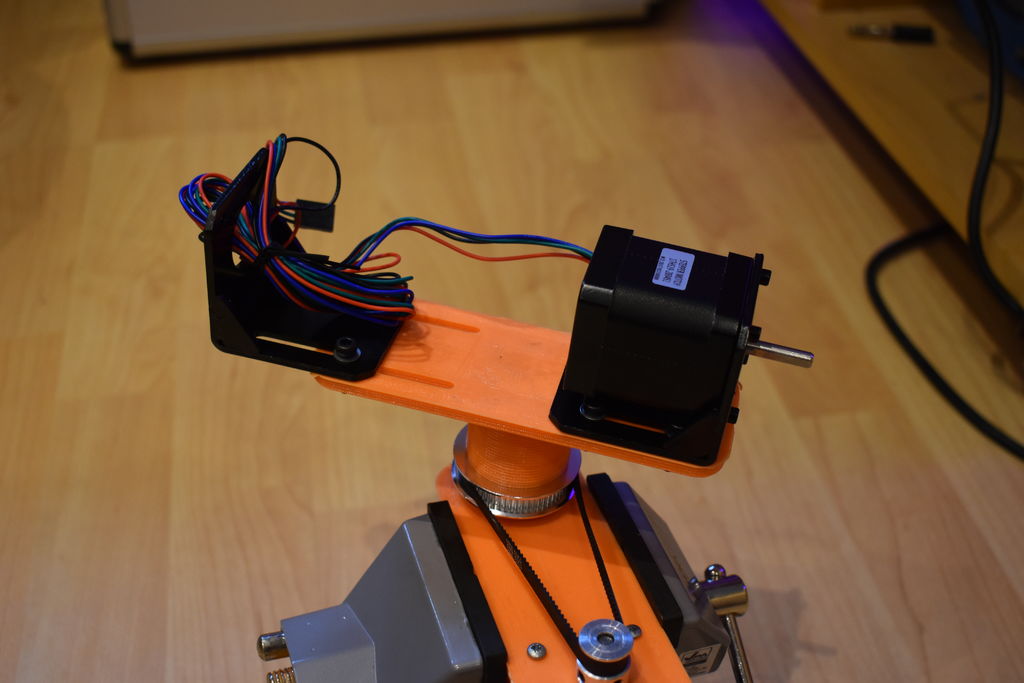
现在3D打印 Bottom Yolk Section.stl。打印完成后,使用某种形式的加热来加热底部的管道部分。然后将轭放在管道上的孔中的大齿轮上,齿轮上有一个平头螺钉孔。将M4螺栓拧入将底部支架部分固定到大齿轮上的孔中。现在使用L型支架,4个M3螺钉和4个M4螺母和螺栓将第二个电机固定到支架部分。仅使用两个M4螺母和螺栓将另一个L型支架固定到另一侧。修正它,使其比轭部分的主体延伸得更远,如上图所示。
第3步:倾斜机制


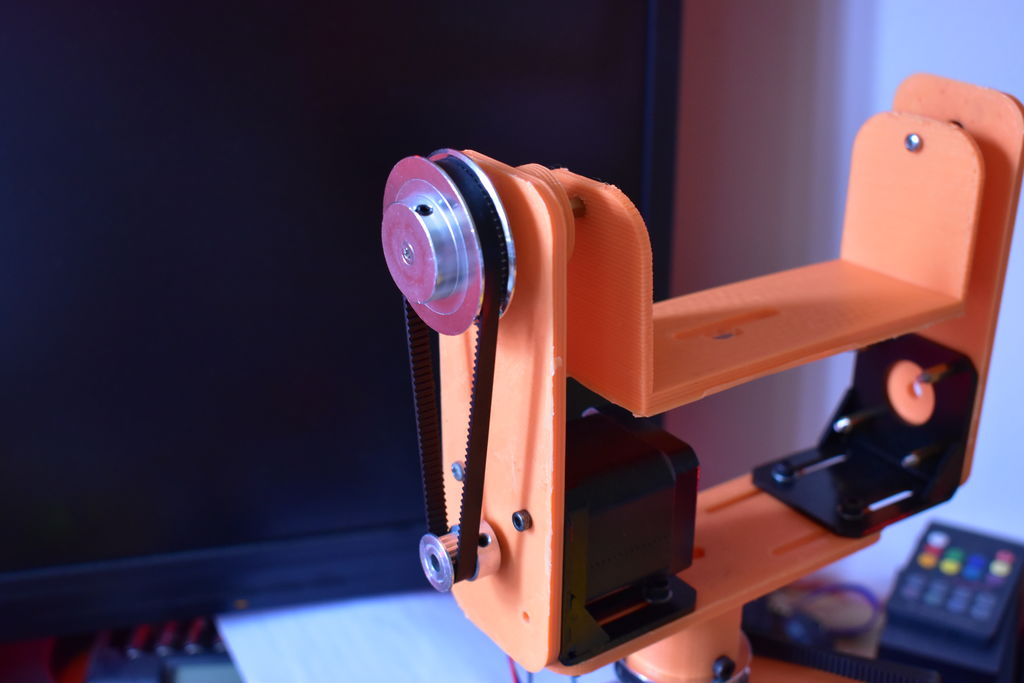
重复第一步,安装2个轴承和黄铜支座,以创建齿轮系统,如何在另一侧添加额外的黄铜支座。用于连接倾斜板的轴承。然后,您需要将此板连接到已安装在底部轭板上的步进电机,确保大齿轮朝外。然后,这将允许您将小齿轮连接到步进轴,同时还可以放在皮带轮上。
步骤4:倾斜机构:第2部分
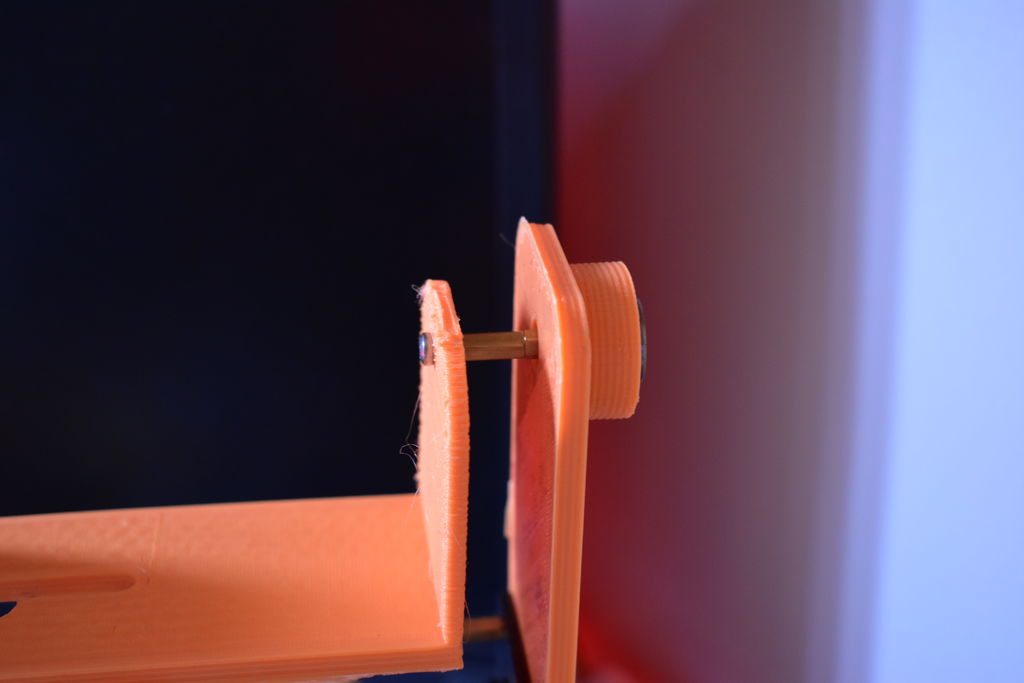
然后,您将使用16mm bearing.stl 取下最后一个 Pand倾斜马达支架,并使用L型支架将其连接到底部支架部分的另一侧, 4个M3螺钉和螺母。然后,您将以与步骤1和步骤3中相同的方式添加两个轴承。您将在一个黄铜支座上锤入面向支架的一侧的轴承。然后拧上一个M3螺丝,在另一个的末端添加另一个支架,如上图所示。
步骤5:添加倾斜板
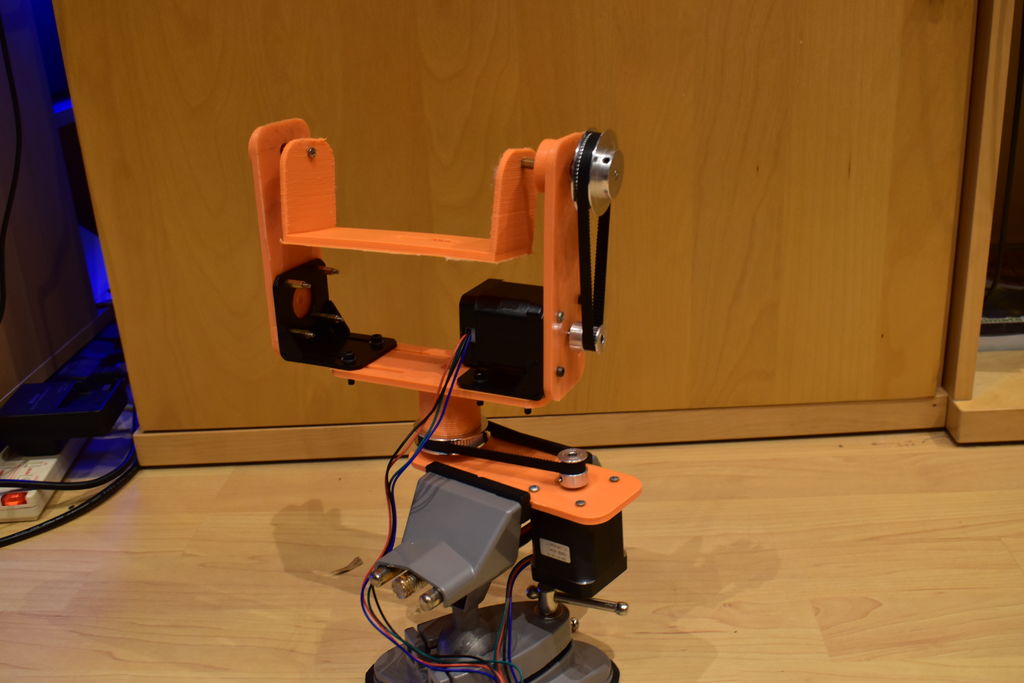
现在需要打印出 Camera mount.stl 文件。打印完成后,需要使用M3螺钉将任一端的两端连接到黄铜支架上。一旦你完成了这项工作,你就完成了建筑方面的工作。
第6步:焊接和接线
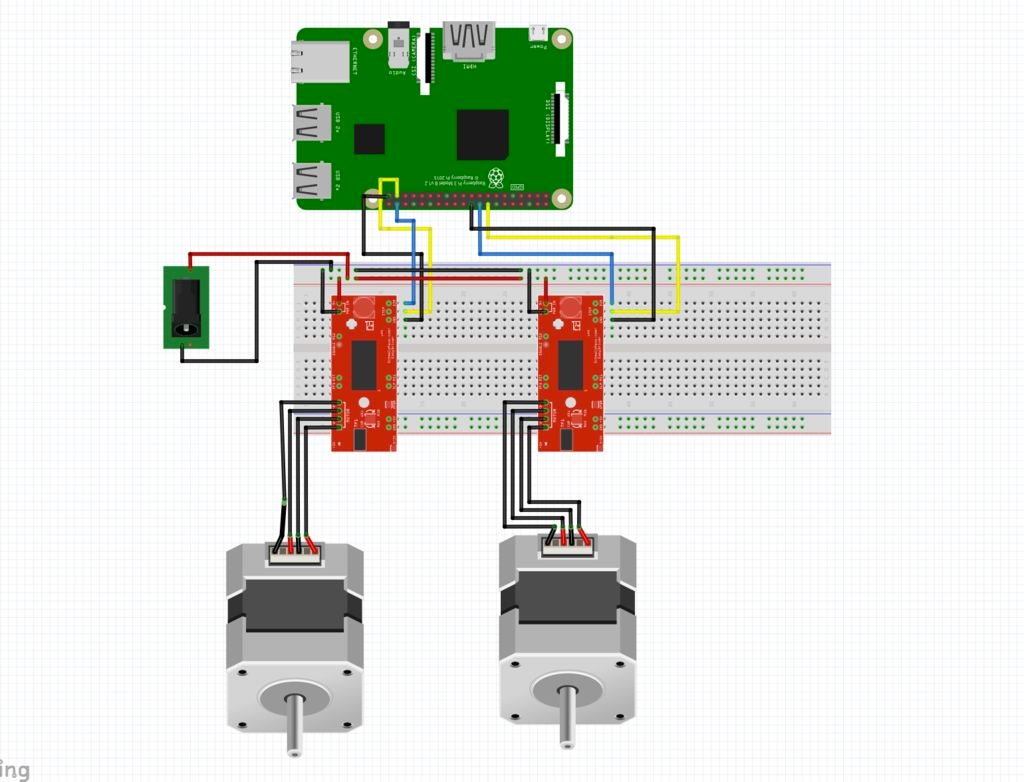
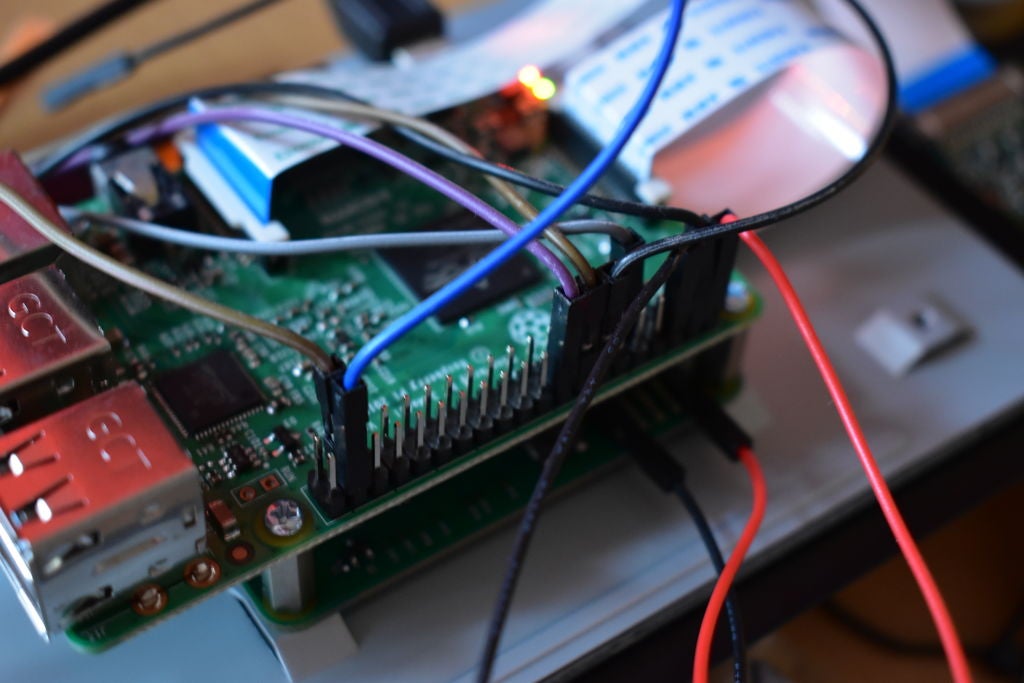
您现在需要将引脚焊接到2个简单的驱动板上,因为这是我们将要用来驱动平移倾斜机构上有2个步进电机。以上是显示Raspberry Pi 3的接线图,因为这是我在制作时使用的。如果您使用不同版本的Raspberry Pi,请确保查看正在使用的Pi的GPIO标题图,然后将信号和方向引脚更改为合适的引脚,确保您记住哪个是哪个。您还必须稍后更改代码中的引脚编号。要为简单的驱动器供电,您需要一个9V 2A电源。我使用了Arduino的DC桶式插孔,然后使用Arduino的电源引脚为两个简单的驱动器供电,但是你可能想要使用不同的东西。
第7步:设置Raspberry Pi和安装Python程序
您需要下载 pantilt.py 和 2motors.py 并将其放在同一目录中的Raspberry Pi上。然后要开始游戏中时光倒流,你必须运行2motors.py。应该出现一个GUI,这是您输入延时设置的地方。目前GUI尚未完全完成,但我将很快添加更多内容。如果要添加GUI中未包含的任何其他功能,请随意编写自己的程序。
-
相机
+关注
关注
5文章
1636浏览量
56083 -
3D打印
+关注
关注
28文章
3658浏览量
119006
发布评论请先 登录
深度探索:Intel® RealSense™ D400系列深度相机系统解析
英特尔RealSense D400系列深度相机系统:技术解析与设计指南



弱光强辨 | 深视智能sCMOS相机亮相细胞学大会,为细胞荧光观测提供新选择


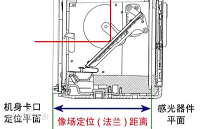
法兰距离:相机镜头系统的关键参数
操作系统运行机制
工业视觉相机的应用有哪些

清洗机制是怎样的?如何区分正常流量和攻击流量?
工业相机与智能相机的区别

Spinnaker 4 SDK助力扩展多相机成像系统

MICRO OLED 金属阳极像素制作工艺对晶圆 TTV 厚度的影响机制及测量优化



评论