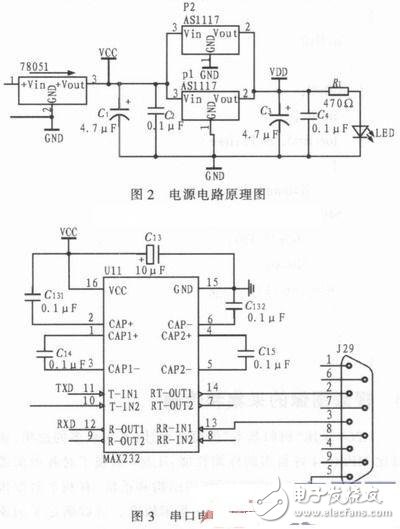
移动机器人人机界面为移动机器人的运动控制提供直观的路径图形、运动速度和角度、障碍物信息等。通过ARM2210的串口UART0接收中心处理器PC104的运动信息,利用东芝公司的液晶控制器
2011-09-23 15:41:56 1887
1887 
今年以来,由中科院沈阳自动化所自主研制的深海自主水下机器人“潜龙二号”和自主遥控混合式水下机器人“海斗”号先后成功完成试验性应用,前者取得我国大洋热液探测的重大突破,后者在我国首次万米深渊科考航次中成功应用,最大下潜深度10767米。
2016-12-22 11:06:43866 ITECH某用户为国际知名ROV公司提供供电系统,采购IT7625线性交流源测试一款工作级水下机器人的变压器、配电单元及控制器。
2020-08-07 17:47:351450 为了提高水下机器人的感知能力,基于仿生原理的触须传感器被研究人员开发并应用。侧线是鱼的一个感应器官,可以感知周围水流的变化,从而帮助鱼在黑暗条件下感知周围的环境。
2022-04-21 15:01:4811016 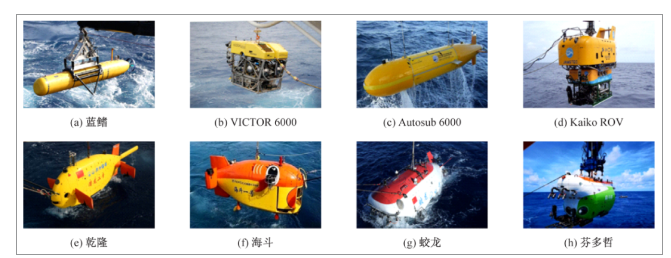
工作的前提。随着现代科学技术的发展,环境监测越来越趋于智能化,无线传感网络、微波辐射技术、ZigBee等技术都被运用到环境检测中来。本文就将为大家介绍一些基于现代技术的环境监测系统的设计。
2020-04-26 09:16:52
这是我根据C8051F120 的PDF资料写的FLASH读和写的程序,但是就是读不对,还把原来程序的内容给覆盖掉了: ////////////FLASH读写操作调试程序
2012-01-02 11:04:26
问一下各位朋友,是不是只要是C8051F120单片机,不管后面跟多少字符,功能都是C8051F120。例如我要买C8051F120DCS0SU1050
2011-05-08 00:14:27
C8051F120的AGND、DGND与电源地是什么关系?AGND与DGND用万用表测是通的,需要处理么?AGND、DGND与电源地之间需要处理么?怎么处理?
2014-02-14 09:47:13
c8051f120单片机怎么点亮第一个发光二极管啊?我引脚图看...
2012-10-31 20:30:07
本帖最后由 eehome 于 2013-1-5 10:05 编辑
水下机器人水面控制台通常基于计算机平台,体积较为庞大,不便于移动。但在某些情况下,如水下机器人水面回收或者水面测试载体各种航行
2011-03-08 14:21:34
工程训练综合能力大赛——水下机器人管道巡检组赛后总结前言一、水下机器人管道巡检组内容简述二、功能实现1.巡检管道2.识别吸附物总结前言前段时间参加了工程训练综合能力大赛——水下机器人管道巡检组,非常
2022-01-11 06:51:45
。另一些情况下,水下机器人的应用环境潮湿并且有腐蚀性物质,对此,TDK-Lambda的电源也提供了恶劣环境应对解决方案。
2019-08-16 11:15:31
项目名称:水下智能机器人试用计划:1.对BeagleBone Black硬件资源进行测评2.通过烧写ubuntu系统 结合硬件资源进行软硬件测试3.基于ubuntu,stm32,电力猫三个硬件构建水下机器人4.项目开阵。按时间完成计划5项目调试 资源分享。预计成果:发表帖子分享项目开展过程,结果,经验。
2017-07-04 16:55:05
摘要:本文主要介绍如何根据国外开源项目(OpenROV)开始自己DIY一个水下机器人。关键词:水下机器人 DIY背景水下无人机在近两年大热,经常出现在各种众筹平台,在大学生的挑战杯等比赛上也能见到其
2017-07-25 20:23:28
项目名称:渔业卫士-基于图像识别的多自由度水下机器人试用计划:1、申请理由希望早日接触、应用国产的鸿蒙系统。2、项目名称渔业卫士-基于图像识别的多自由度水下机器人3、计划(1)约三个月时间,应用该款
2020-09-25 10:11:50
系统,满足水下机器人对水底情况的探测要求3、类似的产品的使用经验目前还只有树莓派对项目的简单应用。之前实验室老师开会的时候,就介绍过友善之臂的Nano Pi ,知道它的强大。我也有信心能用将它在我们的项目上做应用开发。
2017-06-01 09:45:11
分享一下水下机器人的电机控制(针对的是直流无刷电机+双向电调的模式)。其实一句话就说明白了,频率50hz的方波,1.5毫秒占空比是初始化;假如1~1.5毫秒正转,1.5~2毫秒反转,反之亦然。1.5
2021-09-16 08:43:15
韩国先进科技学院设计。这个机器人是仿照蟑螂制作的,它可以用于搜救或环境监测任务。它圆形的外壳允许它像真正的蟑螂那样通过障碍物。它是由加州大学伯克利分校的研究者设计的。这个长得像蜥蜴的机器人
2016-08-24 10:33:05
了一种轮式移动机器人的设计方案。该机器人系统应用超声传感器、光敏传感器、碰撞传感器采集外部环境信息,采用PTR2000实现移动机器人与计算机通信,从而实现现场信息的反馈和计算机控制命令的发送。
2020-05-11 06:39:04
智能水下机器人在海洋石油开发、矿物资源开采、打捞和军事等方面都有广泛的应用前景[1][2][3]。水下机器人已经开始取代过去由载人潜器和潜水员所承担的工作,尤其是在大深度和危险区域发挥了更大的优势。
2019-10-29 07:22:16
PC104是嵌入式工控机的一种,其外部总线接口为PC104总线。使用堆叠的方式可以将多个PC104主板结合到一起,并通过螺栓固定,保证系统的牢固可靠,应对恶劣的使用环境。由于PC104具有功耗低,体积小,扩展性高,功能强大等优点,其已经在航空航天、军用武器装备、工业控制等领域得到了广泛的使用。
2019-09-27 06:30:40
期,发展至今,机器人已能广泛应用于制造业、非制造业以及服务人类,产品种类包括:水下机器人、娱乐机器人、军用机器人、扫地机器人等等。目前,家庭清洁机器人是使用数量最多、应用范围最广的一类家务服务机器人
2017-05-27 13:31:20
温湿度和环境监测、无线通信、躲避障碍物以及无线遥控等功能。此智能监控机器小车与目 前已有的同类设计相比,有性价比高、操作方便、可靠性好、功耗小等优点。
2019-10-14 07:37:52
基于c8051f120的0-5v电压采集并在液晶屏320240上显示,同时采用实时时钟芯片pcf8563t显示时间
2013-05-27 18:42:48
求c8051f120的资料,非常感谢
2011-04-21 21:02:11
用keil进行51单片机编程如何添加C8051F120芯片
2019-07-03 20:32:52
聊天机器人+微信平台检测环境,方案分享回馈论坛的帮助,也顺便给自己拉拉票,第一季创客作品征集大赛,求点赞!!这是链接,有项目介绍:https://www.elecfans.com/project
2017-02-22 19:46:45
请问下c8051f120可以用keil编译吗
2011-04-21 21:06:05
C8051F120/C8051F121/C8051F123/C8051F124/C8051F125/C8051F126/C8051F127和C8051F13x 系列器件是完全集成的混合信号片上系统型MCU 芯片,具有64 个数字I/O 引脚(100 脚TQFP 封装)或32 个数字I/O 引脚(64
2008-07-20 21:15:03 426
426 C8051F120/1/2/3/4/5/6/7C8051F130/1/2/3 系列混合信号ISP FLASH 微控制器数 据 手 册
C8051F13x 系列器件是完全集成的混合信号片上系统型MCU 芯片,具有64 个数字I/O 引脚(100
2008-07-20 21:18:0022 针对自治水下机器人(AUV)所处的真实海洋环境,通过分析长距离航行时AUV局部规划必须考虑的各种因素和可能产生的影响,设计一种局部规划器的结构,提出基于模糊逻辑的解决方案
2009-04-18 09:50:4232 描述了Paradigm C++ IDE 嵌入式系统开发工具的功能和应用范围,并介绍了PC104嵌入式计算机系统的性能和特点,重点说明了在Paradigm 环境下开发基于PC104 的应用系统的存储空间
2009-05-30 08:58:4215 描述了Paradigm C++ IDE 嵌入式系统开发工具的功能和应用范围,并介绍了PC104嵌入式计算机系统的性能和特点,重点说明了在Paradigm 环境下开发基于PC104 的应用系统的存储空间
2009-05-30 10:44:5029 根据近红外光谱仪(NIRS)的特点,利用C8051F120 单片机提出一种数据采集系统的设计方案,实现了对数据的精确采集。本文扼要介绍了C8051F 系列单片机的接口结构及工作原理,重点阐述
2009-09-24 16:34:4055 针对北极冰下海洋参数监测的使命要求,对水下机器人控制系统进行了相关研究,将PC104 总线与CAN 总线应用到自主/遥控水下机器人中,实现了一种分布式与集中式相结合的水下
2009-12-19 15:21:1019 提出一种分层路径规划算法来解决大范围海洋环境下的智能水下机器人(AUV)的全局路径规划问题。该算法将
2010-03-03 14:52:0118 根据移动机器人重构和多执行器的特点, 研制出基于高可靠性的PC104和独特直流电机驱动控制网的开放型控制器. 控制指令和数据的广播或点对点的通讯以及电机运动模式的在线转换
2010-08-19 16:27:1229 为了实现同一套环境监测系统能应用于不同的污染源,使环境监测更方便、快捷,提出一种远程环境监测系统设计方案,该方案采用嵌入式系统和无线远程通信技术相结合的设计思
2010-11-24 18:36:2532 C8051F120与RS422息线的时钟同步技术
引 言 由于指令的速度不断加快,单片机在各个方面的性能大为提高,比如多个单片机之间的时钟同步。Silicon Labs公
2009-12-15 17:02:192422 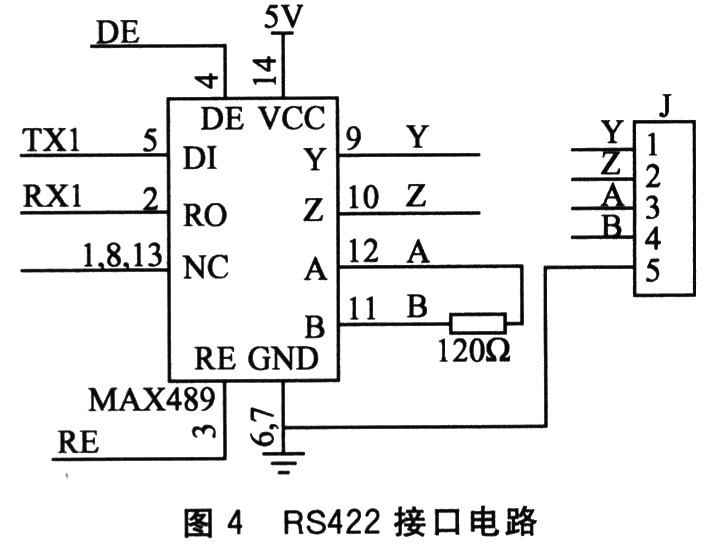
本文设计利用工控机上的PC104总线,通过共享双端口RAM的方式,实现工控机与DSP之间的高速数据交换。本文详细介绍了系统设计的基本思路,PC104与双口RAM的硬件连接方式及其设计要点。
2011-04-15 15:02:2291 深度模拟器根据设定指令产生期望的压力输出,用来模拟水下航行器在不同深度所承受的水压。利用PC104 总线产品体积小、嵌入式的特点,研制基于PC104 总线的小型化车载型深度模拟器
2011-06-17 17:30:4330 嵌入式设备凭借其与使用者之间的亲和力、自然的人机交互界面,得到了迅速的发展,渗透到生活中的各个角落。本文介绍的设计方法是以高性能的8位单片机C8051F120作为核心处理器,
2012-06-04 11:18:511814 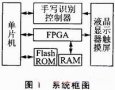
摘 要 针对传统洗井方法效果不理想的缺点,设计了一种基于C8051F120单片机的洗井自动控制系统。该洗井自动控制系统能够连续有效地采集洗井过程中的液体流量和浊度,通过分析出液
2013-03-06 15:36:4051 水下机器人是建设海洋强国、捍卫国家安全和实现可持续发展必需的利器。我国水下机器人研制经过多年追赶,部分技术已与国外看齐,亟待进一步整合产业链条资源,积极推动水下机器人成果转化,应对新一代全海深、全海域、组合化水下机器人研发。
2016-12-22 09:40:121506 自治水下机器人自适应滑膜控制_吴宝举
2017-01-30 23:17:316 依靠NI myRIO控制的4块鳍,敏捷的水下机器人Sepios能够向6个方向移动 这个方案将向您演示一个采用NI MyRIO控制的4鳍水下机器人方案,这个由学生制造的Sepios水下机器人依靠4块
2017-02-08 20:24:38903 无人机来源于航模,航模有很多开源的项目,而水下机器人开源的项目非常少,如果要从事水下机器人的创业,很多设计都需要从零开始。
2017-09-22 07:29:2614900 随着人工智能大潮的逐渐渗透,近年来各个国家对海洋资源越来越看重,纷纷加大了水下机器人的研发投入。美国、日本、法国作为最早一批研制水下机器人的国家,如今早已掌握了先进的水下机器人技术。
2017-09-27 15:10:421182 执行任务的关键之一。本课题针对AUV的体系结构和实际应用,为其设计实现一套高可靠性,通信灵活,简单易用,具有模块化特点的监控系统软件。水下机器人实现实际应用的前提条件是具备自主导航能力,自主导航主要研究移动机器人在已知的环境当中,如何从指定起始位姿运动到指定目
2017-10-25 11:46:351 在惯性坐标下的6 自由度空间动力学方程,并给出水下机器人期望状态的约束条件,获取水下机器人滤波跟踪误差及水下机器人系统的误差动力学方程,以此实现控制器的抗干扰设计,实验结果表明,所提方法下水下机器人控制器的控制
2017-10-28 13:04:499 以主推加舵控制的小型自治水下机器人为研究对象,建立了水下机器人的数学模型并进行了分析。根据机器人结构的特点,对模型进行了必要的简化。设计了机器人的运动控制系统。以成功研制的无缆自治水下机器人(AUV
2017-11-12 09:43:1710 类比已经趋于成熟的空中无人机市场,水中机器人未来消费级市场规模可达百亿级。在2015年,商业嗅觉敏锐的黄俊平看中了水下机器人这片蓝海,组建了一个研发能力强、能根据市场反馈快速迭代的技术驱动型团队,在
2017-11-30 15:57:207042 ,提出了一种基于LahVIEW的ROV水下机器人的水面平台控制系统,利用实验水池对水下机器人的人机交互界面和摄像头拍摄图像进行了测试。研究结果表明,该系统能实时监测水下机器人的各项性能数据,能够实现通讯连接、机体状态显
2018-03-14 15:36:246 随着海洋资源的不断开发,水下机器人作为一种先进的探索被不断应用到该领域,得到了快速的发展以及高度的重视。
2018-07-25 17:11:008899 开架式通用水下机器人开源搭建手册
2018-05-04 17:20:3314 从“上天”到“下海”,水下机器人作为机器人新形态的出现也为人工智能的发展拓宽了领域,而作为发展的新方向,其也应“大有可为”。
2018-05-26 10:35:0022277 水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人成为开发海洋的重要工具。水下机器人都有哪些鲜为人知的“十八般武艺”?一起来看看吧。
2018-07-07 09:28:3016536 美国科研人员正在利用人工智能帮助水下机器人适应各种极端环境,以完成勘察水中建筑安全状况的任务。
2018-07-28 09:46:444054 水下环境复杂多变,性能优良、操作灵活的水下机器人是当今进行深海作业必需的设备。此次代表中国参赛的哈尔滨工程大学E唯协会的成员,带着水下机器人第八次参赛。他们从2011年开始参加比赛,2012年获得第四名,2013年第五名,2016年第六名,2017年第四名。
2018-08-08 15:12:535109 市场规模为241.5亿元,市场占比为41.59%;安全监测类水下机器人市场规模分为194.3亿元,市场占比为33.45%;搜索救援类机器人市场规模将达到68.3亿元,市场份额为11.75%;
2018-08-16 14:34:5211828 水下机器人的工作环境是不同的水域,水下状况多变,对机器人的技术要求提出了更高的挑战。水下机器人制造技术密集性高,主要包括仿真、智能控制、水下目标探测与识别、水下定位、通信、能源系统六大技术。与发达国家相比,我国水下机器人制造的一些关键材料与技术研究领域仍有一定的差距,还需不断发展突破。
2018-09-08 09:44:132055 据报道,当涉及到水下机器人时,基本上有两种类型 - 在自行巡航时收集数据的自主水下航行器(AUV)以及可以在实时被控制并同时执行任务的遥控水下机器人 (ROV)。总部位于德克萨斯州的Houston Mechatronics公司的Aquanaut将上述两种产品相结合。
2018-09-17 15:02:223698 嵌入式设备凭借其与使用者之间的亲和力、自然的人机交互界面,得到了迅速的发展,渗透到生活中的各个角落。本文介绍的设计方法是以高性能的8位单片机C8051F120作为核心处理器,SRAM作为系统的显存
2019-08-09 08:07:003176 
日前,由我国自主研制的“海星6000”有缆遥控水下机器人完成首次科考应用任务,并在多个海域获取了环境样品和数据资料。期间,“海星6000”最大下潜深度突破6000米,再创我国有缆遥控水下机器人(ROV)的最大下潜深度纪录。
2018-11-01 09:43:582652 本文结合水下机器人(ROV)在阳江核电厂取水口海生物监测中的应用实例,介绍了ROV的原理、系统组成、主要功能、作业流程,总结出国产水下机器人( ROV)用于核电厂冷源取水口海生物监测的优势,同时展望水下机器人在我国核电行业应用的广阔前景。
2019-05-08 09:38:427070 随着人工智能的快速发展,在恶劣的工作环境下,用机器人替代人工的做法越来越广泛,在2019数博会人工智能全球大赛武汉分赛区比赛中脱颖而出的大智若鱼——子母型多功能水下机器人便是其中之一。
2019-05-16 10:32:111397 利用人工智能帮助水下机器人适应各种极端环境,以完成勘察水中建筑安全状况的任务。
2019-07-11 15:52:181351 水下机器人是高技术的集成,虽然水下机器人本体的各种材料及相关技术已基本成熟,但随着水下机器人向大范围、大深度、长续航、多功能的发展,一些关键技术还需研究解决
2019-07-17 16:15:2514032 由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。20世纪后半叶诞生的水下机器人,在机器人学领域属于服务机器人中的特种机器人类别。
2019-12-26 10:36:553250 水下机器人是一种技术密集性高、系统性强的工程,随着应用领域的不断扩大,水下机器人会向着体积更小、兼容性更强、智能化程度更高的方向发展。
2020-01-24 16:59:001134 水下机器人在海洋开发、勘探水下环境以及未来水下战争中发挥着重要的作用,但是它的续航能力有限,因此在海底建设供电系统是十分有必要的。
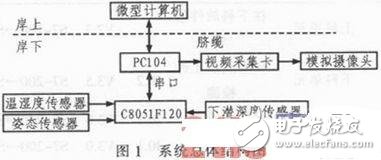
2020-02-04 16:08:053017 系统结构框图如图1所示。C8051F120是整个系统的主控制芯片,负责对数据的处理和交换,包括通过RTL8019与以态网的通信,通过UART口与PPI总线通信,通过RS232口与LonWorks总线
2020-04-04 17:59:001991 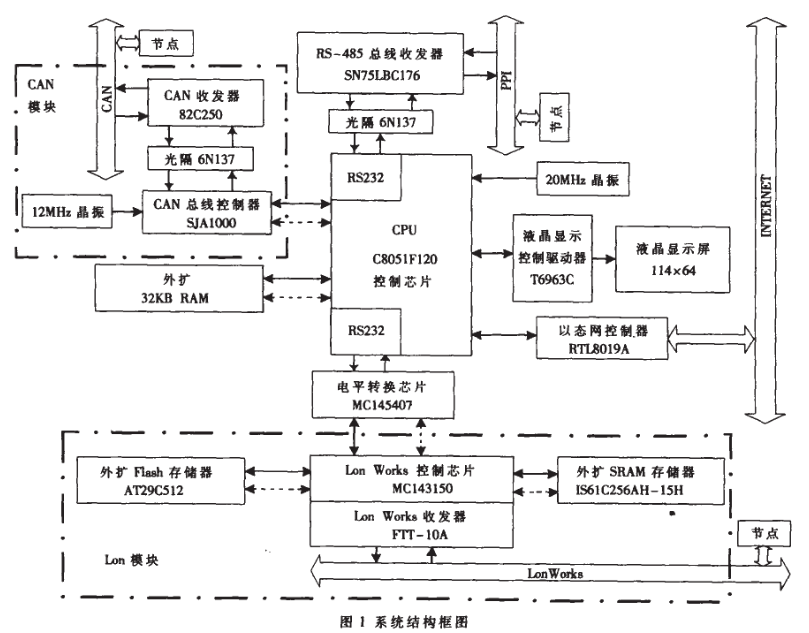
相对于陆地,人类在水下环境工作的困难程度和危险程度都要更高。特别是海洋环境更为复杂,也更容易遇到意外风险,所以一些水下作业用水下机器人取得人类来进行是必要的。
2020-05-10 15:14:55942 此次现场赛主要针对海洋环境监测、海上防险救生等需求,在真实开放的海洋环境条件下对水下机器人作业性能进行评测:针对水下机器人巡航与智能能力(感知、控制、驱动、通讯)进行考察
2020-06-10 16:20:132691 地球约有71%的面积覆盖着水,在水下蕴藏着丰富的资源。但全球海洋的平均深度超过3000米,人类难以在此环境下长期生存,使用机器人来探索、开发这些水下资源成为一个更好的选择。遥控水下机器人ROV是一种
2020-07-09 18:04:371115 除此以外在水下作业方面,水下机器人的出现与应用也能对水利工程监测、水环境监测、水下设施清洁维护、水下抗洪抢险等发挥出重大价值。有了水下机器人的助力,人们不仅能从水下近距离开展水利建设,更能将水利范围从河湖拓至海洋。
2020-07-20 10:38:521332 随着国内海洋石油工程、海洋科考、海洋打捞等领域对水下机器人使用需求的不断扩大,相关政府部门在项目立项与实施方面水下机器人的产业化发展给予政策倾斜,未来我国水下机器人产业化、规模化进程将会进一步加快。
2020-08-18 10:04:344000 音圈模组水下机器人为生命护航。大家都知道海洋底有很多奇妙的神武等着我们去探索和发现,而且一些水底救援工作要开展,人们潜入到水底是很危险的事情,因此水下机器人就横空出世了。是能代替人类作业的水下救援及巡检机器人。
2021-03-24 14:49:001130 近期,武汉长江航道救助打捞局使用深之蓝水下机器人完成一次2200米高海拔水下检查项目。 该水电站位于黄河流域。主要任务是对水电站某机组进水口拦污栅、检修闸门门槽及相关流道水下检查,进口水快速闸门门槽
2021-04-09 17:06:302765 基于ARIMA模型的环境监测系统设计方案
2021-06-30 11:23:3411 混合信号ISP-Flash系列单片机C8051F120
2021-09-01 14:15:5633 水下机器人行业主要集中在北美、欧洲、中国、日本等国家和地区。目前,中国是最大的生产地区。从消费端来看,2018年中国水下机器人行业占全球销量的25.07%,中国巨大的市场需求和增长潜力,吸引了几乎所有国际巨头在中国开展相关业务。
2022-06-08 11:35:228476 海洋包含着一片似乎无边无际的有待探索的领土,在全球范围内绘制这些未知水域的地图是一项艰巨的任务。自主水下机器人舰队可能是帮助绘制地图的宝贵工具,但这些机器人需要能够在保持高效和准确的同时导航这一杂乱的区域。
2022-08-23 10:15:421999 的水质监测解决方案。 在安全方面,河流、海洋、湖泊水底是否有危险物物以及水质好坏情况的检测也是水下机器人的一个工作,虽然这些任务*在水下完成,但对于一些水下的机器人来说,这并不是什么难题。任何作业都要保证安全*,
2023-04-11 16:26:38733 
下面分享某水下机器人供电干扰改善案例,从外围电路中关键的接地部分出发,简单分析故障干扰成因,简化干扰传播路径模型并提出相应的改善方案。
2023-06-08 09:22:451579 
电子发烧友网站提供《水下机器人开源构建.zip》资料免费下载
2023-07-11 10:45:522 这个“长着三个触角”的水下机器人看上去是不是很萌?它使用的是一种新型的由三个球形磁耦合矢量推进器组成的推进系统。与传统的水下机器人使用多个固定推进器来实现多自由度(DOF)推进相比,矢量推进器具有多自由度、寄生推力小,以及效率高等优势。
2023-08-24 11:21:412830 
电子发烧友网站提供《基于PC104的实时信号采集处理系统设计.pdf》资料免费下载
2023-10-10 09:37:541 电子发烧友网站提供《基于μC/OS-Ⅱ的远程环境监测系统设计方案.pdf》资料免费下载
2023-10-18 10:36:510 电子发烧友网站提供《基于PC104的放线车检测系统硬件设计.pdf》资料免费下载
2023-10-24 10:54:260 功率放大器模块在水下机器人中的应用。 在水下机器人中,功率放大器模块主要用于电力传输和驱动。由于水下环境复杂、恶劣,需要保证机器人具有足够的电力输入和输出,以保持其运行稳定和可靠。功率放大器模块可以将电力信号转化
2023-12-18 16:25:26893 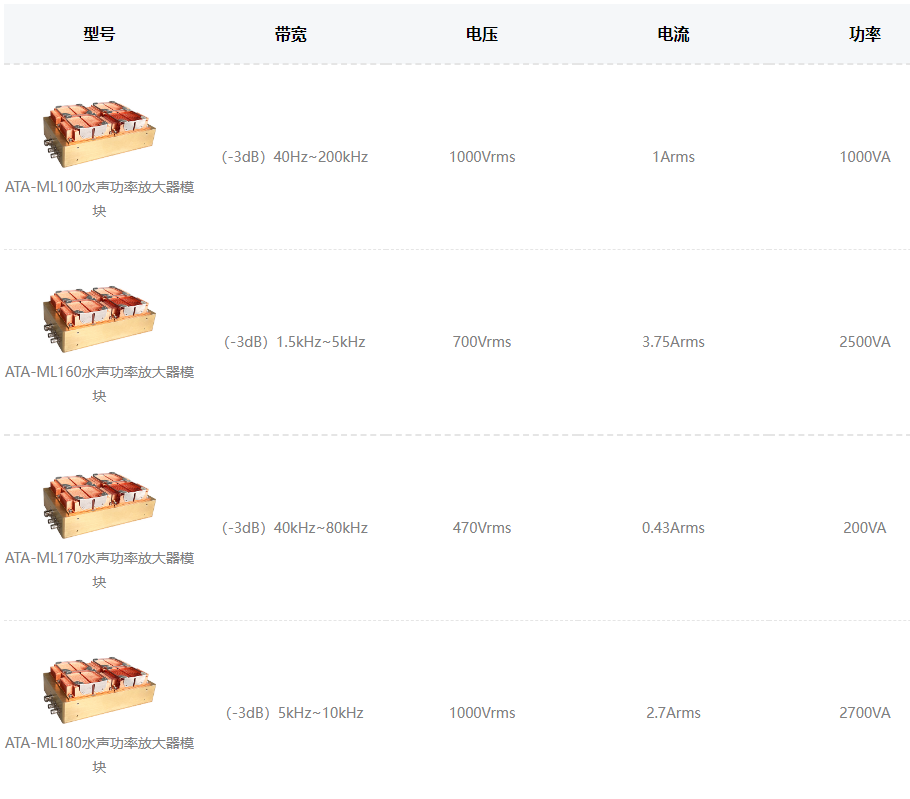
在此背景下,肇观电子推出全球首创W系列水下机器人视觉模组,以光学视觉革命突破水下感知瓶颈!
2025-06-17 14:58:191264 
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论