世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的关系

相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标系之间的装换关系。
2023-07-03 10:30:11
基于dq坐标系下的永磁同步电动机的数学模型
进行仿真分析。 本文首先对永磁同步发电机绕组故障理论进行了研究,重点对永磁同步发电机的匝间短路故障进行讨论与分析。然后介绍了基于dq坐标系下的永磁同步电动机的数学模型。通过不同坐标系下的数学变换,可以
![]() jfsky
2021-08-27 06:15:52
jfsky
2021-08-27 06:15:52
基于双dq坐标系的自解耦三相锁相环算法
0引言锁相环广泛应用于如电能质量分析、电力系统保护、并网变换器以及无功补偿等现代工业控制领域。已有研究人员对单dq坐标系三相锁相环算法进行了分析,通过对电压矢量的坐标变换及PI控制,实现理想电压工况
![]() ht_liu
2021-09-06 09:24:01
ht_liu
2021-09-06 09:24:01
深度剖析机器人的四大坐标系

大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合。
2023-11-13 11:24:46
三坐标如何建立坐标系?

我们在检测工件时,需要正确的装夹检测工件,使工件有足够的检验空间和恒温时间,坐标系的建立就是为后续的测量奠定基础,建立错误的坐标系直接导致测量尺寸的误差建立正确的参考方向即坐标系是十分重要的。
2023-02-17 10:24:17

同步旋转坐标系下的数学模型
1.同步旋转坐标系下的数学模型1.1 dq坐标系下的定子电压方程1.2 dq坐标系下的定子磁链方程1.3 定子电压方程变换式及等效电路由上述两个方程,可以得到定子电压方程的新等式:电压等效电路如下
![]() 723662364d
2021-09-03 07:20:48
723662364d
2021-09-03 07:20:48
带你来剖析机器人的坐标系吧!
大地坐标系:大地坐标系是以大地作为参考的直角坐标系。在多个机器人联动的和带有外轴的机器人会用到,90%的大地坐标系与基坐标系是重合的。但是在以下两种情况大地坐标系与基坐标系不重合:
2020-05-09 15:49:43
解决电压方程在静止坐标系与运动坐标系转换问题
本文将解决电压方程在静止坐标系与运动坐标系转换问题。本文将呈现的转换关系是电压方程由静止坐标系转换至运动坐标系,反之同理可证。
![]() pipompipom
2021-08-27 07:17:03
pipompipom
2021-08-27 07:17:03
如何计算才能把坐标系转换成水平的坐标系?
当mpu6050初始放置的时候是倾斜的,如何计算才能把坐标系转换成水平的坐标系?转换后的效果是保证倾角不变,水平转动mpu,出来的数据是水平转动的。我用当前四元数与初始的四元数做差,得到的四元数坐标系还是与mpu坐标系相同,不知道怎么计算才能把坐标系转换成水平的?
![]() cmh27
2019-07-31 22:19:38
cmh27
2019-07-31 22:19:38
CAD制图软件新手攻略:坐标系及标注坐标
浩辰CAD制图软件为绘图空间提供了一个绝对的坐标系,并称之为世界坐标系,这个坐标系存在于任何一个图形之中,而且不可更改。相对于世界坐标系,用户可根据需要创建无限多的CAD坐标系,这些坐标系称为用户
![]() dilino
2020-09-23 10:28:54
dilino
2020-09-23 10:28:54
机器人中都有哪些坐标系

坐标系是我们非常熟悉的一个概念,也是机器人学中的重要基础,在一个完整的机器人系统中,会存在很多坐标系,这些坐标系之间的位置关系该如何管理? ROS给我们提供了一个坐标系的管理神器——TF。 机器人
2023-11-22 17:20:23
介绍坐标系和机器人之间的纽带即连杆坐标系
目录1. 引言2. 连杆坐标系3 DH参数3.1 DH参数的介绍3.2 DH参数定义3.2.1 连杆长度和扭角3.2.2 连杆转角和连杆偏距4. 解决问题5. 总结1. 引言 前面的文章我们一直在
![]() riverdj
2021-09-01 06:17:14
riverdj
2021-09-01 06:17:14
Pmsm在旋转坐标系的数学模型坐标变换
Pmsm在旋转坐标系的数学模型坐标变换dq轴电压方程整体模型电压计算模块dq轴磁链计算d,q轴电流转距计算转速计算仿真结果因为转动惯量较小,转速迅速跟随同步转速顺利启动。A相电流与电压波形...
![]() 香奈儿苦苦奶茶
2021-08-27 07:56:09
香奈儿苦苦奶茶
2021-08-27 07:56:09
三坐标测量机的机器坐标系和原点介绍

三坐标测量机的机器坐标系和原点是其测量系统中的重要概念,以下是详细介绍:一、机器坐标系(1)定义:机器坐标系是三坐标测量机固有的坐标系,是测量机进行测量和数据处理的基础。它是基于测量机的机械结构
2025-03-10 10:34:46
如何更改mpu6050的DMP使坐标系跟原坐标系一致?
如果我的坐标系跟原坐标系不一致,(例如我现在的X轴是原来Y轴的反方向,现在的Y轴是原来的X轴,Z轴不变)更改姿态程序的什么地方,我用的是战舰板的MPU6050软件
![]() cnmz
2019-07-22 03:05:16
cnmz
2019-07-22 03:05:16
Frenet坐标系,自动驾驶“混乱”的源头
Frenet坐标系的建立基于一个参考线,这个参考线可以是任意曲线,但在自动驾驶运动规划中一般定义为道路的中心线,这条中心线是地图模块输入过来的一系列离散点。同时使用参考线的切线向量和法线向量建立一个直角坐标系,如图1所示,这个坐标系就是Frenet坐标系。
2023-04-03 10:16:42
机器人坐标系用法和算法原理

一般都会定义机器人第一轴的旋转轴为基坐标系Z轴,旋转中心即是坐标系原点,X和Y的方向是的电机零点确定,所以只要你不更换电机的零点和机械结构,单个机器人里这个基坐标系是永远不会变的!
2023-05-11 15:57:44
工业现场相机坐标系和机械手坐标系的标定
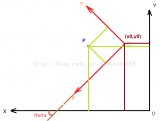
其中r是毫米像素比、(mm/pixel)就是一个毫米有几个像素,theta为两个坐标系之间的夹角,(x0,y0)为图像坐标原点到机械坐标原点的距离。
2023-11-12 09:42:18
arcmap如何设置地理坐标系
ArcMap是一个功能强大的地图制作和分析软件,可以用来设置地理坐标系。地理坐标系是一种将地球表面上的位置表示出来的方法,它使用经度和纬度来确定地点。 要设置地理坐标系,可以按照以下步骤进行操作
2024-02-25 13:41:24
机器人坐标系Launch文件解析
Launch文件解析 先来看下刚才运行的launch文件,里边启动了四个节点,分别是: 小海龟仿真器 海龟1的坐标系广播 海龟2的坐标系广播 海龟跟随控制 其中,两个坐标系的广播复用
2023-11-22 17:44:42
如何处理四轴东北天坐标系和北东地坐标系不同时传感器输出的数据方向?
问题如下:我在阅读发烧友的四轴代码时,发现四轴是用的北东地坐标系,我现在有两个疑问:1)使用东北天坐标系和北东地坐标系,重力向量都是[0 0 1]吗?还是分别是+/-1? 2)当使用北东地坐标系时,我看到四轴代码将传感器z轴方向反了一下,这是因为传感器的正方向与北东地坐标系不一致所导致的吗?
![]() 分会看见我呢看
2019-07-16 04:35:48
分会看见我呢看
2019-07-16 04:35:48
焊接机器人坐标系有哪几种

焊接机器人是一种自动化设备,用于进行焊接操作。为了确保焊接过程的准确性和效率,焊接机器人需要在三维空间中进行定位和控制。这涉及到使用不同的坐标系,以便机器人能够精确地执行任务。本文将重点讨论
2023-10-18 15:17:21
MEMS惯性传感器的坐标系定义
地惯性坐标系圆心一般取地心,X轴在地球赤道平面指向春分点,Z轴与地球极轴重合指向北极,Y轴与XZ两轴构成右手直角坐标系。惯性元件陀螺仪和加速度计输出的角运动和线运动就是相对于惯性系而言的。
2022-10-31 17:04:23
机器人坐标系选择指令和操作步骤

在编程操作过程中,为了确定机器人的空间位置以及姿态的变化,需要建立合适的工具和用户坐标系。工具坐标系用于确定每个工具中心点(TCP)的位置和工具姿势。
2023-05-12 14:43:42

 工商网监
工商网监


