 三坐标如何建立坐标系?
三坐标如何建立坐标系?

我们首先要弄明白为什么要创建三坐标系,所创建的坐标系的目的是什么,我们在检测工件时,需要正确的装夹检测工件,使工件有足够的检验空间和恒温时间,坐标系的建立就是为后续的测量奠定基础,建立错误的坐标系直接导致测量尺寸的误差建立正确的参考方向即坐标系是十分重要的。
实际上建立一个三坐标系只需要以下三个步骤:
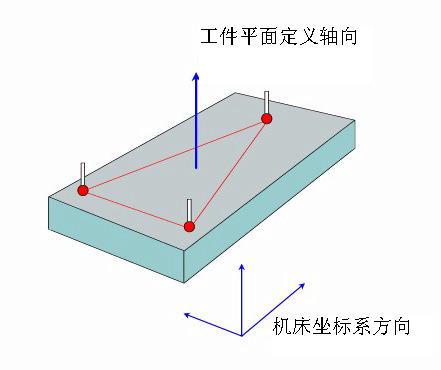
步骤一:测量平面,找正零件,即先确定工件的轴面,选择垂直于工件轴线的平面,而不要垂直于机床坐标轴。若此平面上有灰尘或零件放置不水平位置,将导致基准面测量不准确。(因此,在取到工件并确定其坐标系后,确定其表面清洁)技术图告诉您,哪个面是基准面。若无指示,则在整个平面上尽量均匀地分布着,这样可以得到较好的表面。在计算平面时,至少需要三个点,一般情况能测量更多点参与平面的计算。
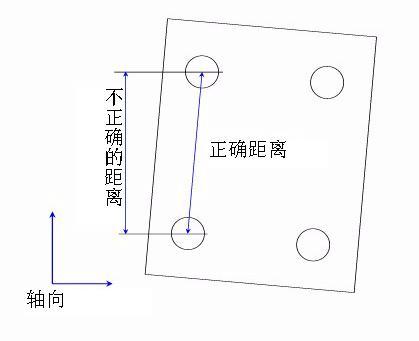
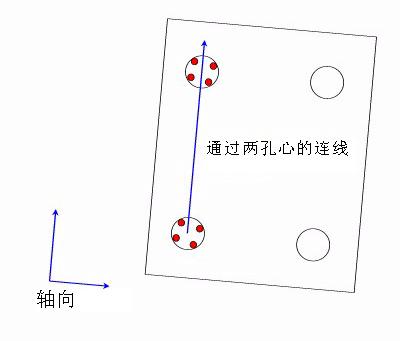
步骤二:转轴即确定第二轴,我们要把机器的轴向和零件的一个轴向连接起来,这就是我们要做的,但我们要告诉软件是如何连接起来的。可选择精加工的一面或两孔构成一条直线。选一条光洁的精加工平面非常重要,不能用一条粗边来建立坐标系,否则会影响坐标系的精度。在右边的图表中,除非我们确定机器的轴向和零件的轴向完全一致,否则不建立零件坐标系测量就是错误的。本例中,用两个孔的中心连线来确定零件的第二轴向,软件利用这条直线进行旋转,这样测量机的坐标轴就会旋转,这样就可以与零件坐标系的方向一致了。由于 XYZ三个轴线相互垂直,所以一旦两个轴线被确定后,第三轴就是唯一不变的。因此,不需要对第三轴再进行测定。
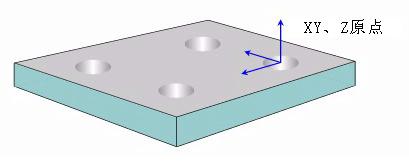
步骤三:原点位于蓝色标签的位置,其坐标值是 X=0, Y=0和Z=0。有时候必须从已知特性出发,软件可以很方便地实现,设定好零件的轴向与原点后的一种坐标系。
上面是创建三坐标系统的方法,三坐标检测工件的不同其制作方法也不同,所以日常我们在对设备进行检测时,要先确认好图纸再进行操作。
 Mars系列移动桥式三坐标测量机
Mars系列移动桥式三坐标测量机 -
检测
+关注
关注
5文章
4785浏览量
93781 -
测量
+关注
关注
10文章
5512浏览量
116128
发布评论请先 登录
三坐标如何实现测量效率的提升?

三坐标测量机结构材料对性能的影响
三坐标测量机结构材料对性能的影响
三坐标和激光跟踪仪的不同之处

三坐标测量机精度保障,尽在蔡司三坐标代测服务套餐

LSM6DSV16X内置的传感器融合算法SFLP,输出的四元数是自身坐标系下的还是全局坐标系下的?

电机矢量控制分析方法介绍

Chart FX——坐标轴简介

三坐标厂家教你提高三坐标测量机的检测效率






 工商网监
工商网监
评论