 在机器人控制系统中定义了下列坐标系
在机器人控制系统中定义了下列坐标系

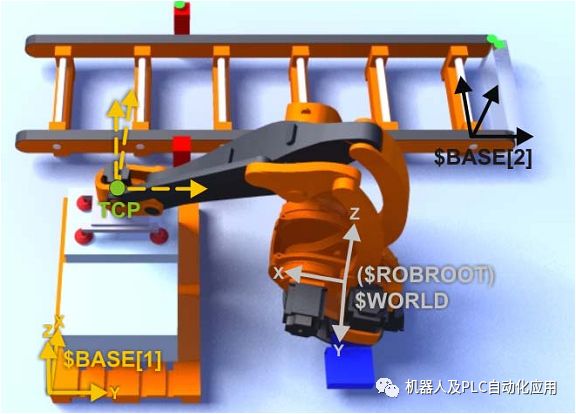
在工业机器人的操作、编程和调试时坐标系具有重要的意义。在机器人控制系统中定义了下列坐标系:
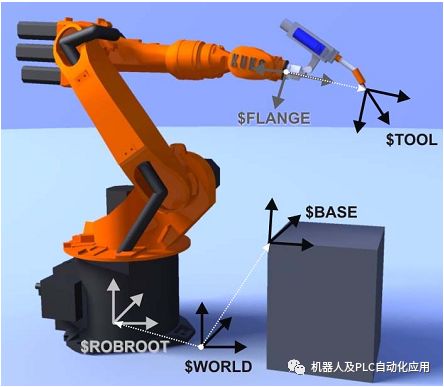
ROBROOT
机器人足部坐标系
固定位于机器人足部。
是机器人的原点。
是世界坐标系的参照点。
WORLD
世界坐标系
在供货状态下与ROBROOT坐标系中一致。
可以从机器人足部 “ 向外移出 ”。
说明世界坐标系在ROBROOT坐标系中的位置。
此外,机器人系统为壁装与吊顶安装时使用。
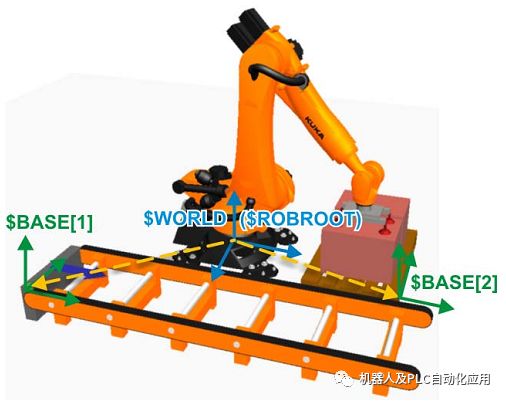
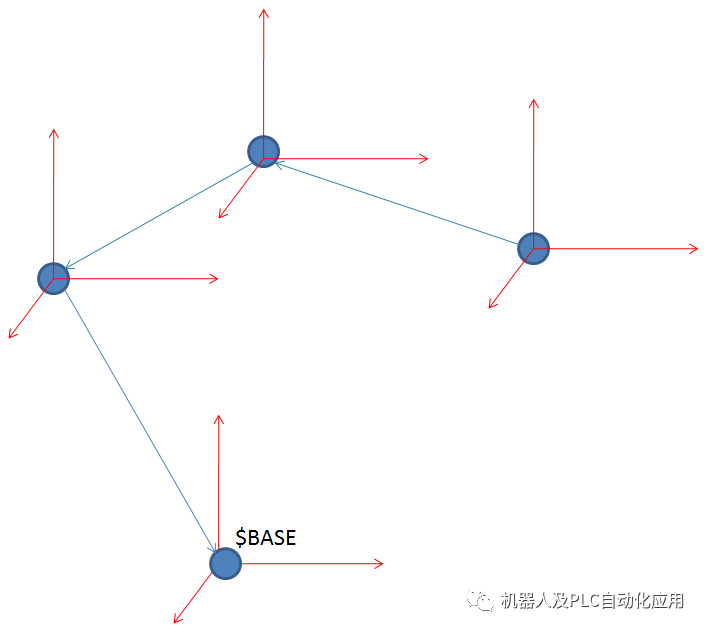
BASE
基坐标系
是一个可自由定义、用户定制的坐标系说明基坐标在世界坐标系中的位置。用于测量工件和装置。位置在congfig.dat
例如:DECL FRAMEBASE_DATA[32]
BASE_DATA[1]={X 2497.67993,Y -82.7900009,Z 1138.84998,A90.0410004,B -0.0939999968,C -0.0610000007}
说明BASE1是相对world坐标计算出来。
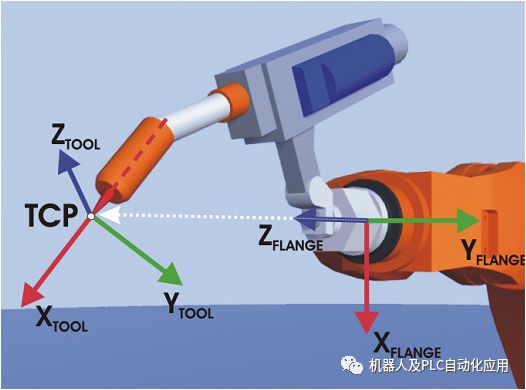
FLANGE
法兰坐标系
法兰坐标系固定位于机器人法兰上。
原点为机器人法兰中心。
是工具坐标系的参照点。

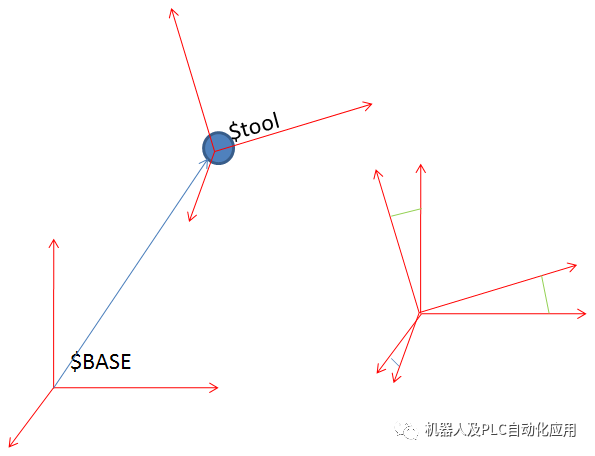
TOOL
工具坐标系
是一个可自由定义、用户定制的坐标系。
TOOL 坐标系的原点被称为 TCP - Tool Center Point,即工具中心点。
用于测量工具。
例如: 位置在congfig.dat :DECL FRAME TOOL_DATA[32]
TOOL_DATA[1]={X 33.7000008,Y -311.0,Z 304.0,A -90.0,B0.0,C -90.0}
说明tool1是相对法兰坐标计算出来。
例如机器人在执行轨迹程序时,使用两个坐标,1个tool ,1个BASE坐标。
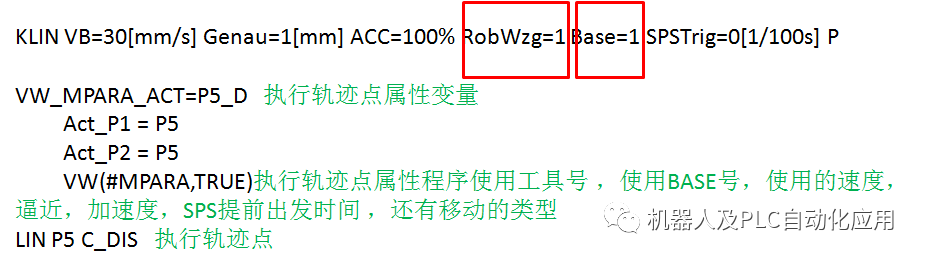
从Dat文件上看每个轨迹点分两部分(在此以大众标准为例)
1.使用工具号,使用BASE号,使用的速度,逼近,加速度,SPS提前出发时间 ,还有移动的类型 :KLIN#GLUE_MOTION
DECL VW_MPARA_TYP P5_D = {TOOL_NO 1,BASE_NO 1,VB 30,VE 1,ACC 100,TRG_TIME0,MOVE_TYPE #GLUE_MOTION}
2.P5点的坐标值
DECL E6POS P5 = {X 952.3254, Y 597.7797, Z 1142.121, A-18.13582, B 23.29328, C -30.74332, S 6, T 59 , E1 -0.001224949, E2 0.0, E30.0, E4 0.0, E5 0.0, E6 0.0}
在机器人移动过程中每个轨迹点的空间坐标都是以机器人的BASE坐标确定的,而它的姿态是通过TOOL坐标换算`出来的 。
空间上机器人的XYZ坐标是以BASE坐标为零点计算出来的。
如果机器人移动到设定的BASE点时那么它该点的坐标X,Y,Z,值都应该是0。
那么为什么我们改变工具坐标的XYZ后,轨迹点不能按照我们的意愿去偏移呢?
这是因为机器人算法的关系!C 4机器人的轨迹算法决定了偏移的坐标.
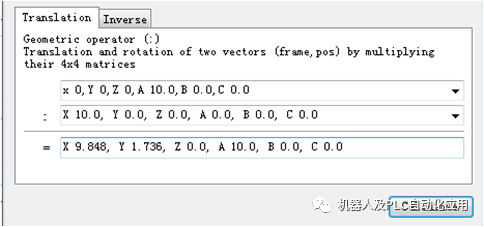
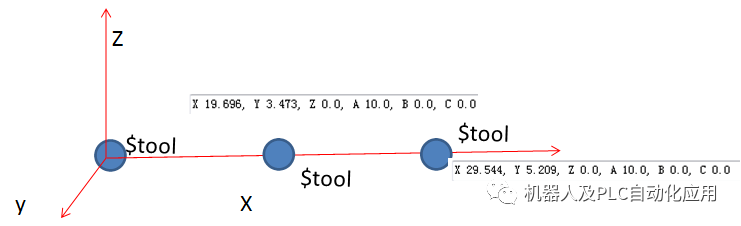
例如:如果你的工具在tooL坐标的X方向上偏了10mm
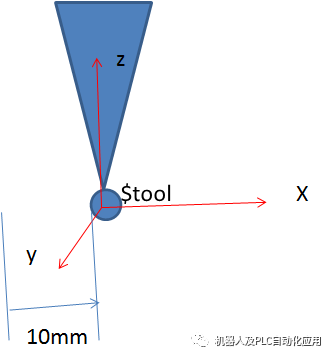
我们通过KUKA计算器或着运算程序可以得出:这个X向的偏差可以使工具坐标的X偏移9.848,Y方向偏移1.736A旋转10.0这就偏差的换算。表面上是工具的X方向 偏差,但是如果你想消除这个偏差你需要改变TOOL坐标的X,Y,和A来实现。
在这里我是真的要感谢OrangeEdit.Fee这个软件,它总是在我遇到难题时给与我无私的帮助!和灵感!
审核编辑 :李倩
-
控制系统
+关注
关注
41文章
6989浏览量
114378 -
机器人
+关注
关注
213文章
31435浏览量
223616
原文标题:KUKA C4机器人轨迹BASE与TOOL坐标浅谈
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
泰克示波器在机器人运动控制信号测试中的应用

磐时助力坐标系纯机电线控制动系统通过TÜV北德ISO 26262 ASIL-D功能安全认证

一次讲清TOA 测距与卫星定位基础:原理 + 坐标系

探索RISC-V在机器人领域的潜力
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
ADI安全产品如何简化不同机器人控制系统中安全机制的实现

ADI解读机器人控制系统中的安全风险和有效安全措施 为机器人技术的未来发展筑牢安全防线

轮式移动机器人电机驱动系统的研究与开发
改进GPC算法在永磁同步电机控制系统中的应用
详细介绍机场智能指路机器人的工作原理
基于先进MCU的机器人运动控制系统设计:理论、实践与前沿技术
EtherCAT科普系列(7): EtherCAT技术在工业机器人控制系统领域的应用




评论