,钢制底盘,外仓采用高质度玻璃钢一次性铸造完成。 传感系统采用:进口电子传感系统。 软件配置: 采用2012型驾驶模拟器软件,车型配置:有小轿车,农用车,大货车,大客车,微型客车,无级变速等14种
2012-09-05 18:05:07
`目前,市场上虽然出现了一些爬壁机器人,但至今还没有一种专门针对玻窗清洁的机器人。本文介绍了一种基于负压吸附的轮式玻窗清洁机器人,将其用于高层住宅的的玻璃清洗工作。使用该机器人可以避免玻窗清洁带来
2012-12-20 10:29:35
良好。 针对目前高层住宅清洗玻璃时面临的操作繁琐、难度较大、危险较高等问题,本文介绍了一种新型玻窗清洁机器人,给出了玻窗清洁机器人的总体设计思路,重点阐述了玻窗清洁机器人的结构设计、驱动模块以及
2011-09-08 15:51:03
设计一种成本较低,能够代替实际光伏电池阵列来进行各种光伏实验的太阳能电池模拟器。本文所设计的太阳能电池模拟器以BUCK电路为基础,采用ARM控制,并加入了电流PI控制方式来改善系统动态性能和稳态精度。此外,本文还采用四折线法来对光伏电池阵列的特性曲线进行分段拟合,并进行了仿真验证。
2019-07-16 07:17:49
及实时响应的场合,单通道CAN总线不能满足实际通信的要求。为此,介绍一种基于多通道实时CAN模拟器的设计方案。
2019-07-19 08:15:59
本文论述一种自主产生式的雷达回波模拟器中频部分的设计实现方法,该模拟器可产生脉冲单频、脉冲线性调频、步进频、步进频+线性调频等多种波形的雷达回波信号,并可产生双目标和参数可控的带限高斯白噪声,可模拟
2019-07-19 07:26:14
`尽管有很多同学想参加机器人设计大赛,但是他们却不知道该如何入手。例如,很多同学不知道应该怎样设计机器人,需要采用哪些零部件和原材料,这些材料和零件应该怎样使用,应该怎样加工零部件等等。要制作机器人
2012-01-10 15:49:15
什么是PID控制?机器人设计中PID控制的编程方法是什么?
2021-06-30 06:53:20
机器人设计方案{:7:}分享
2014-06-30 13:12:48
以软体机器人为背景和主题,深入讲解:(1) 软体机器人的关节设计方法;(2) 有限元分析技巧;(3) 力学模型的建立方法; (4) 基于MATLAB与视觉识别技术的软体手柔性抓取控制与实验等内容
2019-08-12 15:09:17
LabVIEW 与机器人设计
2009-05-30 16:35:13
从命令。《机器人设计与实现》搭积木的方法为读者提供了一整套实用、易懂、低成本的设计理念,而且为读者提供了充分的想象空间,使读者可以将自己的想法与书中的方法结合,从而设计出自己满意的高智能机器人。目录第1篇
2017-08-01 18:21:38
对误差的分析与研究最终目的都是为了通过各种方法与技术来消除或者降低这些误差带来的影响,而误差补偿技术则是用来消除或者降低位姿误差而得到广泛应用的一种技术。一般常用的机器人误差补偿方法可分为两类:一
2017-07-14 15:02:25
项目名称:基于香橙pi的机器人设计试用计划:本人拥有香橙pi one的使用经验,非常熟悉香橙派的使用技巧,希望能够使用orange pi zero完成一个轮式机器人的设计,使用开发板作为主控,加上6
2016-12-08 16:09:34
一、机器人设计理论二、机器人仿真分析基础机械臂Matlab建模仿真分析基于Matlab 与ADAMS联合的机器人系统仿真分析三、软体关节设计软体机器人关节定量设计常见软体机器人设计实例四、有限元仿真
2021-09-02 11:17:25
、功率放大器、数码摄像机。实验过程:旋转软体机器人的实验研究:在旋转软件机器人的转速测量实验中,功率放大器将信号发生器发出的激励信号进行放大,然后激励信号施加在机器人上。为了测量机器人的旋转角度,在
2021-04-09 10:02:13
、功率放大器、数码摄像机。实验过程:旋转软体机器人的实验研究:在旋转软件机器人的转速测量实验中,功率放大器将信号发生器发出的激励信号进行放大,然后激励信号施加在机器人上。为了测量机器人的旋转角度,在
2021-04-14 09:56:50
广大发展中国家的医院来说有点难以承受。为开发出一种大众化的手术机器人,美国普渡大学电子机械系的科研人员经多年研究,终于研制成一套新型便携式手术机器人,其售价仅为每台20万~25万美元,约为目前手术
2011-03-01 10:27:46
题目:基于SLAM的移动机器人设计嵌入式PPT应具有的几个部分1、有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6
2021-11-08 06:17:14
基于视觉的高速寻线机器人设计与实现
2012-09-08 10:59:29
基于视觉的高速寻线机器人设计与实现
2012-09-08 11:04:30
如何去制作一种基于arduino IDE的写字机器人呢?有哪些基本步骤?
2021-12-21 06:52:41
手术机器人系统的工作原理是什么?如何去实现一种基于传感器的机器人手术系统设计?
2021-09-28 08:46:20
气动爬行机器人设计简介项目规则简介最近在学校做一个气动的爬行机器人,算是一个二级项目,虽然名义上有分组,但是基本上是我自己在做,觉得有些东西值得记录和分享,所以把一些东西写下来,留作以后参考。项目
2022-01-13 08:09:39
一种基于CPLD的CCD相机图像信号模拟器的设计
2021-06-04 06:13:35
NI应用工程师 徐征技术市场工程师 朱君 汤敏引言机器人的研究与开发是当今学术界和工业界的热点之一,机器人的发布数量较之过去有明显增长,2010年机器人市场规模预计将达到4700亿美元。过去人们往往
2019-07-31 07:17:18
工业机器人设计工程师指南
2021-07-22 11:01:22
怎样去设计一种基于STM32的负压式玻璃清洗机器人呢?有哪些操作流程?
2021-10-14 08:47:00
汽车驾驶模拟器控制系统的原理是什么?汽车驾驶模拟器控制系统的功能有哪些?怎样去设计一种汽车驾驶模拟器控制系统?
2021-05-17 06:36:41
机器人视觉传感器详解一种新型的工业机器人已经走到行业的前沿, 他们的主要特点是能够安全地协助人类工作。在网上有很多人谈论它们,但你认真了解过它吗?
2020-08-14 07:24:17
` 本帖最后由 小巧的鱼 于 2015-4-23 00:10 编辑
智能机器人设计资料大全相关的原理图源程序请点击下载:[hide][/hide] `
2014-06-04 15:21:22
和哈佛大学开发了一个新版本,它既柔软又坚韧,能像蚯蚓那样蠕动,却能在狠狠锤打下安全无恙。 这个外号叫“Mesh-worm”的机器人是受蚯蚓启发设计的。它与我们看到的其他软体机器人截然不同的是移动不靠
2015-01-19 14:56:38
红外遥控六足爬虫机器人设计
2013-02-19 16:38:25
红外遥控六足爬行机器人设计
2013-01-28 15:12:22
(yaw-roll-roll-yaw-roll-yaw)与市面上大部分机械手机器人使用的相同。在伸展位置,Thor 高约 625 毫米,可以举起高达 750 克的负载。该项目的主要目的是设计一种可用
2022-07-25 07:04:10
怎样去设计一种基于PID算法的巡线机器人?基于PID算法的巡线机器人有哪些优势?
2021-07-27 06:54:05
怎么设计一种室外移动机器人组合导航定位系统?如何实现室外移动机器人组合导航定位系统的硬件设计?如何实现室外移动机器人组合导航定位系统的软件设计?
2021-04-19 10:50:33
感、安全感。而“智蚁”即智倚或智椅,给人以安全的可依靠工具,并结合其外观,给人一种很强的安全感、亲和感、科技感。搀扶机器人设计在功能上抓住老年人因脚部缺乏锻炼而导致无法脱离轮椅”的痛点,充分利用全球领先的行者
2020-10-12 17:42:40
方式通过非常狭窄的通道。由于身体的柔软性,软体机器人接触尖锐的物体后还不会受到伤害,这一特性使得它们能够进入人体进行药物运输,或者作为医疗手术中的操作员进行临床手术。实际上,柔性驱动器已经作为操纵器被
2024-02-27 17:15:22
本文提出了一种基于CPCI母板和PMC背板的通用雷达回波模拟器的设计与实现,重点介绍了基于单片FPGA设计PMC背板,实现雷达回波信号模拟器数据合成(噪声/杂澎目标回波)的设计方
2009-05-08 17:17:45 37
37 本文介绍了一种成功应用于某自主外测系统的多普勒模拟器的设计与实现。该模拟器易于使用,控制灵活。在系统联调期间,该模拟器可进行极小步进、快速扫频,取得了满意
2009-05-25 15:14:4833 在分析机器人比赛对机器人寻线行走功能的基础上,提出了一种寻线行走机器人的设计方法,采用高性能的DSP完成核心处理功能,为满足光电检测1/O端u数目和其它辅助数字电路的需
2009-07-10 15:40:4732 3000W机器人设备配件激光焊接系统整体介绍该系统并非单一设备,而是一套集成了高功率激光器、工业机器人、专业焊接头、工作台、控制系统及安全防护于一体的自动化智能制造单元。其核心价值在于为机器人设
2025-12-18 09:45:21
一种新型智能清洁机器人测控系统的设计
0 引 言
移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。传感器系统一般采用
2009-11-09 17:02:51 1342
1342 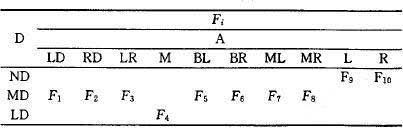
一种新型的基于LabView设计的脉压模拟器
摘 要: 提出了一种新型的基于LabView设计的脉压模拟器,介绍了其设计思想、系统的软硬件构成及应用。
&n
2009-12-01 10:25:251122 
一种嵌入式智能寻迹机器人设计
1 引言
在信息技术的飞速发展,计算机,通讯、消费电子三种技术合一的后PC的时代,虽然计算机和网络已经全面渗透到日
2009-12-25 17:49:50824 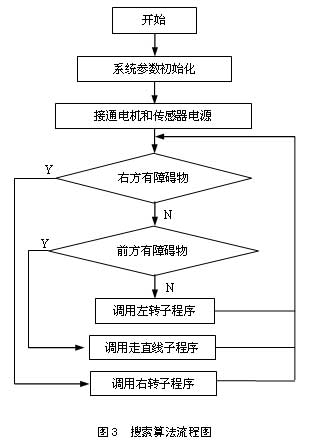
摘要:本文介绍了一种简易的驾驶模拟器视景的三屏幕实现方法, 它利用一台主机配专用显卡来实现。在实际效果中三投影 的沉浸感比单投影有显著提高。 关键词:驾驶模拟器; 三屏幕;
2011-05-04 09:54:3342 一种新型智能机器人触觉传感服装的研究!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:48:1015 一种新型模糊PID控制器在伺服系统的应用-2009。
2016-04-06 14:07:279 智能搬运机器人设计
2017-01-22 21:11:0244 提出了一种基于FPGA的雷达回波实时模拟器的实现方法。该模拟器采用cPCI 标准总线,以FPGA 为核心计算单元,配有高速数模、模数转换模块,可实现雷达回波信号实时在线注入模拟。该模拟器可实现多种
2017-11-18 13:00:013419 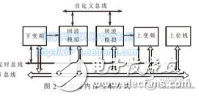
进行交互作业的能力,而且这类软体机器人一般具有充分的柔顺性、适应性、超冗余或无限自由度,甚至可以任意改变自身形状和尺寸以适应环境和目标。 针对软体机器人结构化分析困难的问题,对软体机器人气腔耦合结构、嵌入式加
2018-03-07 15:21:050 处理器体系结构模拟器可以对处理器的结构采用软件方式进行模拟,辅助处理器的研究工作。通过对多种结构和微结构参数进行配置,可以对处理器设计方案进行评估分析。通过将处理器设计结果与模拟器模拟结果进行对比
2018-03-12 16:13:220 近日,哈佛大学的研究人员以日本古老的剪纸艺术kirigami为设计灵感,利用具有感应结构的可变形材料来模拟蛇鳞,从而研发出一种新型软体机器人。该机器人能够像蛇一样,通过反复的充气、放气来爬行,可用于搜索和救援等任务。
2018-03-15 16:04:038921 美国麻省理工学院(MIT)的研究人员开发出一种3D打印小型软体机器人,该机器人可被磁场操纵,有望应用于生物医药领域。据介绍,该机器人是一种形似雪花片的3D打印结构,完全伸展开最大直径约4cm。
2018-06-27 15:01:233642 据消息称,美国麻省理工学院研究人员开发出一种3D打印的小型软体“机器人”,可被磁场操纵,有望应用于生物医药领域。
2018-07-25 17:21:224036 MIT 研究人员利用 3D 打印技术,研发出一种可控性超高的机器人,宛如无须丝线的木偶般,依靠磁力即可控制其移动、翻滚、跳跃,灵活地令人难以置信。
2018-07-31 11:36:001775 据外媒New Atlas报道,早在2010年,康奈尔大学的研究人员使用充满咖啡渣的气球创建了一种机器人抓手。现在,康奈尔大学的一个团队制造了由爆米花填充和驱动的软体机器人设备。
2018-08-07 10:16:483876 本文档的主要内容详细介绍的是机器人设计教程之基于“创意之星”的机器人设计资料说明主要内容包括了:一、机器人构型设计和运动规划实验
2018-12-25 11:40:1311 东京工业大学的研究人员开发出一种液压执行器,可以使坚固的机器人在灾难现场和其他恶劣环境中运行。东京技术创业公司H-MUSCLE公司的成立是为了追求执行器的应用,产品样品的运输将于2019年2月开始
2018-12-29 09:34:123735 据报道,瑞士洛桑联邦理工学院(EPFL)和苏黎世联邦理工学院的科学家,携手开发出一种微型柔性机器人,可根据周围环境而改变形状。未来,这款机器人或可被我们吞服,将药物直接递送到病灶组织。
2019-01-22 09:48:032073 麻省理工大学(MIT)的专家研究出小E机器人,它与植物有一种共生关系。生物体使用电信号来控制机器人的运动。
2019-01-28 13:49:221382 机器人抓取一直是业界的一大难题,最近,澳大利亚昆士兰科技大学的机器人学家们开发出了一种新的方法,让机器人可以更快、更准确地抓取物体,包括混乱和多变的环境中,这可能会提高其在工业和家庭环境中的实用性。
2019-01-30 11:27:021067 布朗大学(Brown University)的研究人员使用一种能够动态响应环境的新型双聚合物材料开发出一套模块化水凝胶组件,可用于各种“软体机器人”和生物医学应用。
2019-03-31 10:00:584152 据报道,未来太空中的机器人可能看起来不像R2-D2,Wall-E和Robby。它们可能看起来更像是巨大的湿软蠕虫。 美国宇航局(NASA)兰利研究中心实习生 Chuck Sullivan 和Jack Fitzpatrick 正在开发软体机器人设计,有朝一日可以在太空、月球甚至火星上处理“危险、肮脏或无聊”的任务。
2019-05-09 17:02:451002 MIT的研究人员开发出一种新型 “光子” 芯片,它使用光而不是电,并且在此过程中消耗相对较少的功率。
2019-06-12 09:23:464519 MIT科学家团队设计了一种基于3D打印的磁性软体机器人,通过一个游戏手柄,就能控制该机器人“跳”“滚”“爬”,各种功能可以通过编程来实现。
2019-06-20 09:29:263772 据外媒报道,来自哈佛大学约翰·保尔森工程与应用科学学院 (SEAS)和加州理工学院工程与应用科学学院的科学家们开发出了一种新的软体机器人。 这种软体机器人可以响应外部刺激而移动和改变形状,为未来的无系绳软体机器人铺平了道路。
2019-08-27 17:10:413576 据外媒报道,超级电容器是一种能够存储和释放能量的电子设备,拥有一层电解质 - 一种可以是固体、液体或介于固体与液体之间的导电材料。现在,美国麻省理工学院(MIT)与几家机构合作,研发出一种新型液体,可能可以提高此类设备的效率和稳定性,同时降低易燃性。
2019-09-19 14:49:01984 麻省理工学院(MIT)的研究人员开发了一种配备了人工智能的机器人,该机器人可以在棘手的在线多人游戏中击败人类玩家,而其中的玩家角色和动机却被保密。
2019-11-21 10:03:021392 为了训练机器随机应变、适应真实环境的能力,南加州大学研究团队开发了一个模拟器,能训练机器人拼装宜家家具。如果你觉得亲手组装家具不太难的话,就试试去调教这些机器人吧!
2019-12-04 09:52:335266 清洁机器人是服务机器人的一种,可以代替人进行清扫房间、车间、墙壁等。提出一种应用于室内的移动清洁机器人的设计方案。其具有实用价值。室内清洁机器人的主要任务是能够代替人进行清扫工作,因此需要有一定的智能。
2020-03-14 16:51:003725 
据外媒报道,电池已经为我们服务了几十年,但随着电子设备的不断缩小,它们变得过于笨重和低效。对此,宾夕法尼亚大学的研究人员近日开发出一种新型机器人,它可以通过“吃掉”周围环境中的金属来为自己提供能量。
2020-04-15 16:35:272914 软体机器人有很多可取之处,比如说能够挤过缝隙,或者被人踩在脚下时得以“存活”。而到目前为止,它们通常都是一次性手工组装的。
2020-05-28 09:14:46860 据悉,LEAP机器人长约7cm,重约45g,能以3Hz的低驱动频率达到每秒2.7倍体长的速度移动,速度比当前市场上最快的软体机器人快3倍左右。LEAP不仅能在陡峭的斜坡上前进、水中游动,还可以协同工作,轻松地抓取物体,甚至能举起重达10kg以上的物体。
2020-06-11 14:48:232769 6月30日消息,MIT科学家研发出一种新型短波紫外线(UVC)机器人,能够让共享空间保持冠状病毒或是其他病原体零污染状态。
2020-06-30 14:09:142089 据国内媒体报道,《通讯-材料》最新发表了一篇技术研发成果论文,研究人员已成功研发出一种新型的磁驱动高速软体机器人,这种机器人可以行走、游泳、漂浮和捕捉活体苍蝇。
2020-09-27 10:38:152502 科技日报北京9月24日电 (记者张梦然)据英国《通讯材料》杂志24日发表的一项机器人最新研究,欧洲科学家团队报告研发一种磁驱动的新型高速软体机器人。这种机器人可以超快速地完成行走、游泳、漂浮和捕捉
2020-09-29 17:27:362726 据英国《通讯材料》杂志9月24日发表的一项最新研究显示,欧洲科学家团队宣布研发一种磁驱动的新型高速软体机器人。据悉,这种机器人可以非常快速地完成行走、游泳、漂浮和捕捉活体苍蝇的动作。团队声称,这种
2020-09-29 17:32:162437 《通讯-材料》最近发表了一篇关于技术研究和开发的论文,研究人员成功地开发了一种新型的磁力驱动高速软件机器人,它可以行走、游泳、漂浮和捕捉活蝇。
2020-10-10 10:57:163373 他们找到了一种更聪明的方法来制造比以前更轻更结实的鞋面。这个Futurecraft.Strung (sorry, STRUNG), 是一款概念运动鞋,鞋面由单独的伤口线制成。 阿迪达斯表示,他们已经开发出一种定制机器人。事实上,鞋子是由机器人组装的阿迪达斯对此非常感兴趣这意
2020-10-15 09:28:482754 据外媒SlashGear报道,有几种方法可以确定哪种机器人设计可被用于最有效地穿越各种地形。最耗时的方法是简单地制造每一个机器人的变体,并在现实世界中进行测试 。麻省理工学院(MIT)开发了一个名为RoboGrammar的系统,可以虚拟测试各种机器人设计,并确定哪种机器人最适合穿越特定类型的地形。
2020-12-05 17:18:002652 美国西北大学的研究人员开发了一种新型软体机器人,它可以在光和磁场的激活下,以与人类大致相同的速度行走。该机器人可以挤进狭小的空间,并根据需求拿起、搬动和释放物体。
2020-12-11 15:40:431979 麻省理工学院(MIT)的研究人员已经开发出一种方法,使得计算机根据可用部件和当地地形设计出自己的机器人本体。这个系统被称为RoboGrammar,它知道它需要覆盖哪些障碍物,哪些设备可用,并从
2020-12-24 11:19:422278 为创造一个不受外界帮助的软体机器人,MIT CSAIL 将目光聚焦于深度学习。 ” 说起软体机器人,或许很多人都不觉得陌生了。 软体机器人的发展离不开包括材料学、机器人学、生物力学、传感与控制在
2021-03-31 10:38:122748 
近日,巴塞罗那科技大学的研究人员开发了一种基于骨骼肌的生物混合型软体机器人。在爆发模式下,该机器人一秒钟就能游出自己 3 倍身长的距离。 该研究团队在发表于 Science 子刊 Science
2021-05-11 10:47:212446 据美国《每日科学(Science Daily)》报道,极端环境下的机器人研究又有新进展。近期《科学·机器人》杂志封面刊登,加利福尼亚大学圣塔芭芭拉分校和佐治亚理工学院研究人员最新成果:一种可以挖洞
2021-06-26 16:28:532631 一种新型的全自动除雪机器人装置设计
2021-06-29 16:35:3510 新型手术制孔机器人设计方案
2021-07-05 14:45:3511 为了给机器人上磁,研究人员将钕铁硼颗粒和柔软的有机硅PDMS材料结合,制成微型软体机器人,并在表面覆盖了一层生物相容性的水凝胶层,这样不仅克服了微型物体与机器人软尖端之间的粘附力,还可降低微型机器人与基板之间的摩擦力,另外还可减小对生物目标的伤害。
2022-06-09 09:32:153173 XEMU 是一款轻量级的 RISC-V 解释型模拟器,基于 C 语言实现,支持 RV32IM 指令集,支持简单外设模拟
2023-07-22 14:25:123334 
基于此,研究人员提出一种新型微创方法,可以使用无线微型软体机器人对生物组织进行生理特性检测,让微型软体机器人的医疗功能得以拓展。
2023-09-16 10:14:001313 
北京航空航天大学陈华伟教授课题组报道了一种全新磁控机器人设计制造技术,针对磁控机器人的原位运动编程和位姿感知需求,通过4D喷涂打印制备一种新的碳-磁薄膜多层材料,实现电热磁化和电阻应变传感的功能耦合,达到多模态驱动和位姿感知一体化。
2023-09-26 12:37:381130 
软体机器人是一种新型机器人技术,与传统的硬体机器人有着很大的不同。软体机器人通常由柔软的材料制成,具有高度的柔韧性和灵活性,并且可以实现多种形状和动作。但是,软体机器人的发展面临很多技术挑战
2023-10-13 11:07:01990 
关键角色,为软体机器人的驱动和控制提供了强大的支持。 图:高压放大器在介电弹性体制成的软机器人研究中的应用 二、高压放大器在软体机器人中的作用 (一)驱动柔性致动器 软体机器人的核心组件之一是柔性致动器,这些致
2025-07-08 17:46:19483 
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论