 一种基于磁场驱动的软体微型机器人
一种基于磁场驱动的软体微型机器人

这是60年前,物理学诺贝尔奖得主费曼先生的幻想,现在,体内的“外科医生”已成为现实——微型机器人。具有主动转向能力的遥控微型机器人在医疗应用中具有广阔的前景。
据麦姆斯咨询报道,最近,北京理工大学研究人员研究人员开发出一种基于磁场驱动的软体微型机器人,直径只有200μm,不仅能凭借出色的控制和转向能力模拟在血管中“跑酷”,还能操作微型物体!相关研究成果发表在Cyborg and Bionic Systems期刊上。

让微型机器人动起来,这是第一步。然而这并不容易,因为在微观世界里,很多物理定律与在宏观世界里不一样,微尺度狭窄空间内的物体由于强大的粘附力作用,很难自由地运动。
为了解决这个问题,研究人员使用了磁驱动方法,其原理如下:所有带磁性的物体在匀强的磁场下,都会受到转动力,让它本身磁矩的方向与磁场方向同向。
为了给机器人上磁,研究人员将钕铁硼颗粒和柔软的有机硅PDMS材料结合,制成微型软体机器人,并在表面覆盖了一层生物相容性的水凝胶层,这样不仅克服了微型物体与机器人软尖端之间的粘附力,还可降低微型机器人与基板之间的摩擦力,另外还可减小对生物目标的伤害。
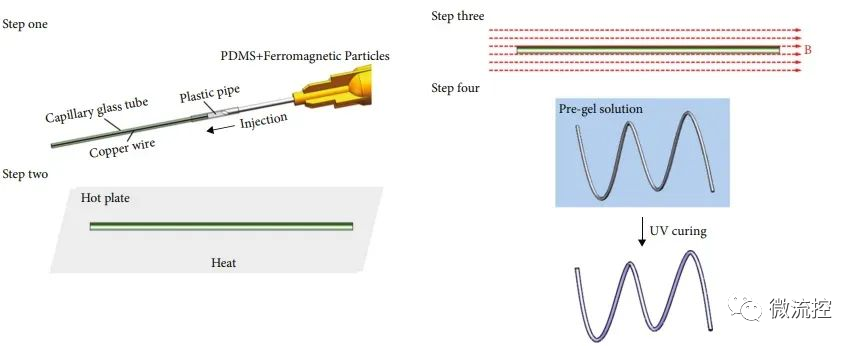
磁驱动系统由一对垂直电磁铁组成,微型机器人根据磁场进行转向和振动移动,由于机器人是软的,可以灵活弯曲身体,这使其能够在复杂的分叉环境中灵活转向。
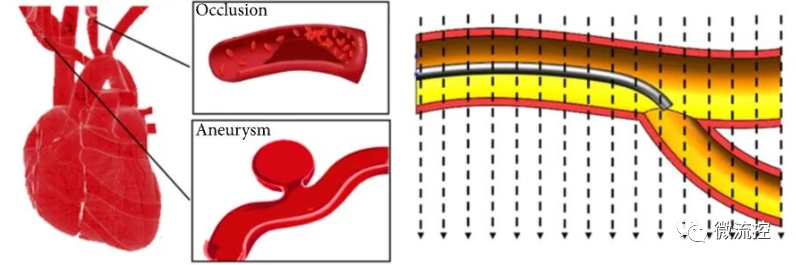
为了测试微型机器人能否在血管里“跑酷”, 研究人员采用3D打印工艺制作了一个宽度为800μm的微流控通道,测试机器人在分叉管道中的转向和运动能力。
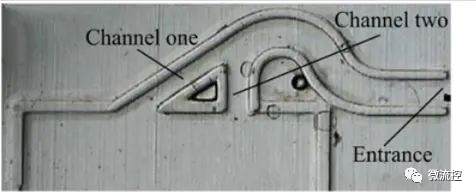
在整个过程中,利用不同方向的磁场来控制微型机器人的转向,时变磁场可以让微型机器人振动起来,从而消除与环境之间的粘附力,同时推动前端,让机器人向前运动。
当微型机器人遇到分叉时,研究人员通过控制电磁铁,产生平行于目标路径的磁场,使微型机器人的尖端指向该方向。

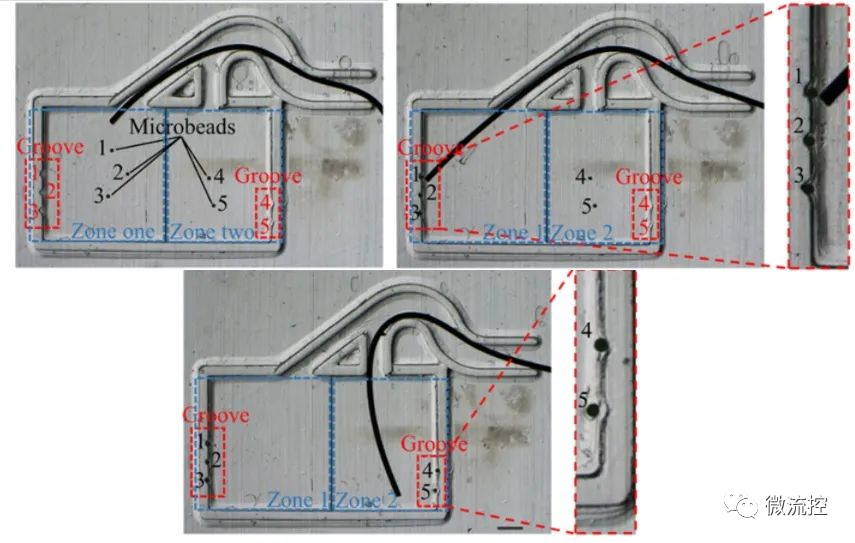
此外,微型机器人还可以操纵微型物体,研究人员设计了一个“搬珠子”游戏,在通道中随机放置了5个微珠,通道还包含几个凹槽,微型机器人可以通过磁场控制,穿过层层迷宫将目标珠子“搬”入目标凹槽中,该任务仅需数分钟就可完成。
在医学应用里,微型机器人可以作为药物的载体,在人体内把药物送到它需要的地方,即“靶向治疗”,也可以成为一把“手术刀”,直接进入血管把血栓溶碎,然后带出来,解决血栓的问题。然而,想让微型机器人真正应用到体内,还有较长的路要走。
北京理工大学研究人员开发的这款软体微型机器人能够在复杂“迷宫”里自如运动和转弯,并且操纵微型物体,这证明了该微型机器人具有巨大的血管内操作潜力,未来,研究人员计划进一步减小微型机器人的尺寸,并提高其控制精度。
论文链接
https://doi.org/10.34133/2022/9850832
审核编辑 :李倩
-
磁场
+关注
关注
3文章
909浏览量
25412 -
微型机器人
+关注
关注
0文章
112浏览量
20229
原文标题:基于磁场驱动的软体微型机器人,用于体内靶向给药和治疗
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
机器人新型电驱动技术:GaN技术引爆“动力革命”,单台用量将破千颗

机器人灵巧手新型电驱动技术:谐波磁场电机与新材料的融合革命

ATA-7030高压放大器在压电软体机器人设计中的应用

智能机器人的“神经网络”:线圈在驱动与感知中的核心作用
高压放大器在介电弹性体软体机器人中的应用

软智赋能,功放大有可为!Aigtek安泰电子亮相软体机器人大会!

中国科学院研发3D手型微纳机器人
Aigtek安泰电子诚邀您莅临第十届软体机器人大会!

驱动服务机器人创新的核心技术

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
介电弹性体软机器人研究:高压放大器的应用实践

工业机器人的特点
高压放大器在软体机器人研究中的应用




评论