 研究人员开发了一种新型的磁力驱动高速软件机器人
研究人员开发了一种新型的磁力驱动高速软件机器人

《通讯-材料》最近发表了一篇关于技术研究和开发的论文,研究人员成功地开发了一种新型的磁力驱动高速软件机器人,它可以行走、游泳、漂浮和捕捉活蝇。
机器人形状像纸,可以像蝉翼一样薄。这种材料嵌入在一个小磁铁中,不需要电驱动,可以根据磁场的变化改变形状和动作。
在机器人中嵌入微型磁铁,它能快速响应磁场,达到迄今为止最高的比能量密度,这是在低磁场下高速驱动的关键。
在实验实例中,重23 mg、厚200 um的四臂机器人在3.7mt磁场作用下漂浮;在17 mm×19 mm、80μm厚的水中传播物体;六臂机器人可捕获、搬运和释放直径为20 mm、厚度为80μm的非磁性物体。
一只花机器人在触发陷阱后抓住了一只苍蝇,然后打开了由磁力驱动的八只手臂来释放它,直径为25毫米,厚度为200微米。
责任编辑:YYX
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
磁场
+关注
关注
3文章
912浏览量
25464 -
机器人
+关注
关注
214文章
31679浏览量
224597
原文标题:科学家研发出软体机器人:薄如蝉翼 会行走 悬浮
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
消防机器人电池完整设计方案
消防机器人电池完整设计方案 一、方案背景 随着现代消防技术的快速发展, 消防机器人 作为一种新型的智能消防设备,广泛应用于火灾扑救、灾后救援
探索RISC-V在机器人领域的潜力
运行ROS 2,充分证明了RISC-V架构完全有能力承载机器人操作系统这样的复杂软件栈。它不仅是学习RISC-V的绝佳工具,更是探索未来边缘计算和智能机器人的一个强大起点。
致谢:
发表于 12-03 14:40
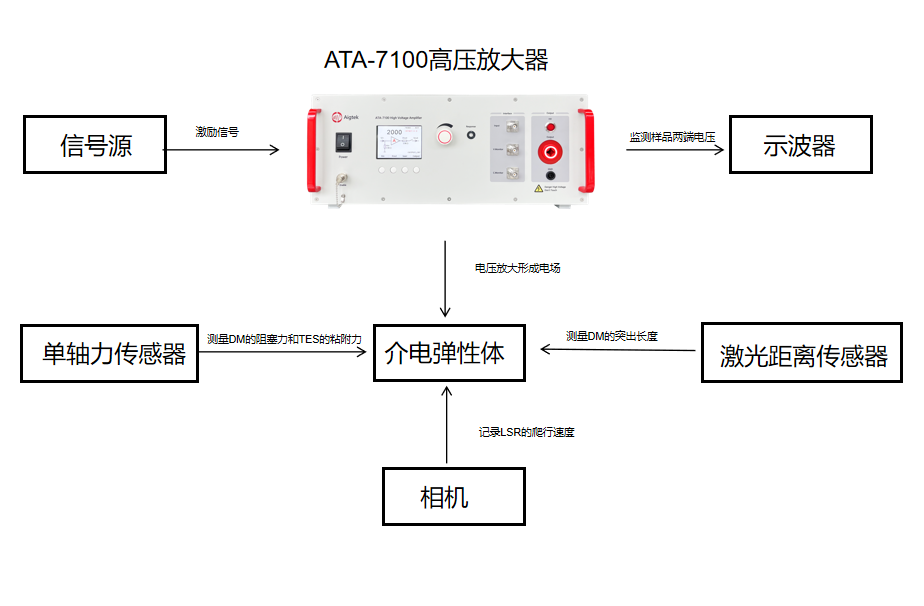
高压放大器在介电弹性体制成的软机器人研究中的应用
进行两栖运动、攀爬和负重爬行。开发了一种高性能的摩擦电仿生机器人系统,用于驱动和控制电响应软体机器人。爬行
强生医疗科技携手NVIDIA推进手术机器人开发
借助物理 AI 和模拟技术,强生医疗科技正在推进 MONARCH 平台的开发,这是一种机器人辅助支气管镜检查领域首个投放市场的创新技术,在美国也已获准用于机器人辅助泌尿科手术。
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
更多"、"互动更流畅"是开发者面临的核心挑战。传统的单一屏幕和有限的视觉输入已成为提升机器人智能化水平的瓶颈。而瑞芯微RK3576高性能处理器的出现
发表于 10-29 16:41
自制巡线解迷宫机器人(上)
为原理验证机且为了提高项目整体的开发速度,机器人的所有元器件均采用TB上的现有模块,并使用洞洞板直接焊接的方式来构建其机械结构和电气连接。
在软件层面上,该机器人内部集成有经典的PID
发表于 10-20 10:39
如何在NVIDIA Isaac Lab中使用Newton训练四足机器人
物理在机器人仿真中发挥着至关重要的作用,它为机器人在真实环境中的行为及交互提供了精准的虚拟呈现基础。借助仿真器,研究人员和工程师能够以安全、高效且经济的方式训练、开发、测试和验证

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
故障率从 15% 降至 3% 以下。随着磁隧道结 (MTJ) 等新型技术成熟,下一代磁传感器有望实现纳米级精度、皮秒级响应速度,或使机器人 “高速竞速” 最
发表于 08-26 10:02
如何基于翼辉信息SylixOS开发ROS 2应用
算法的一站式解决方案,同时辅以功能强大的开发工具,助力工程师与研究人员高效完成项目开发。ROS 2 在实时性、安全性、灵活性和跨平台支持等方面进行了显著的改进,为现代

介电弹性体软机器人研究:高压放大器的应用实践
进行两栖运动、攀爬和负重爬行。开发了一种高性能的摩擦电仿生机器人系统,用于驱动和控制电响应软体机器人。爬行

工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等一切线下连接端口。因此
发表于 07-26 11:22
高压放大器在软体机器人研究中的应用
一、引言 软体机器人因其高度的柔韧性和适应性,在医疗、救援、工业等领域展现出巨大潜力。与传统刚性机器人相比,软体机器人能够更好地适应复杂环境和执行精细任务。高压放大器在软体

微双重驱动的新型直线电机研究
摘罢:大行程、高精度,同时易于小型化的移动机构是先进制造业等领域要解决的关键问题之一,综述了现有宏/微双重驱动机构和直线超声电机的研究进展和存在问题,提出了一种宏微双重
发表于 06-24 14:17
轮式移动机器人电机驱动系统的研究与开发
系统,开发了一套二轮差速驱动转向移动机器人电机驱动系统,完成了系统各部件的整体装配和调试。试验结果表明,该设计方案可行、系统运行稳定可靠、成
发表于 06-11 14:30
明远智睿SSD2351开发板:语音机器人领域的变革力量
源的开发资料为开发者提供了深入研究和定制语音机器人功能的基础,开发者可以根据不同的应用需求,对语音识别算法、语音合成引擎等进行优化和改进。
发表于 05-28 11:36



评论