基于导纳控制的机器人拖动示教是一种常用的机器人控制策略,它允许人与机器人直接互动,实现自然、直观的控制。在导纳控制中,机器人被建模为一个力控制系统,其动力学特性由一个等效的导纳(Admittance)模型描述。导纳模型类似于弹簧和阻尼器的组合,用来描述机器人对外部力和运动的响应。
2023-12-04 09:48:33 8088
8088 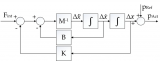
UI大小等,都可以根据用户的日常使用频率或习惯来定制,让操作更加便捷、流畅。4、创建键盘快捷键浩辰3D软件支持用户对键盘快捷键进行自定义设置。通过个性化的自定义设置,能够帮助用户将键盘操作与鼠标应用完
2020-10-29 15:38:44
3HAC031683-001 ABB机器人示教器电缆线销售可维修,汕头市罗克自动化科技有限公司欢迎您前来咨询!联系人郭经理:*** 3HAC031683-001 ABB机器人示教器电缆线
2020-03-20 16:08:15
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
,就能依靠经验,学习到很多更好的作业方法,并且熟练掌握。 机器人传感器可分为机器人内部传感器和机器人外部传感器两种。机器人内部传感器的功能是测量运动学和动力学参数,其提供信息的目的是控制机器人按规定
2018-01-03 17:09:03
首先提出几个问题:机器人是怎记住位置的?机器人是怎么到达它的目标点的?到达目标点的速度多快?什么样的姿态到达?机器人能不能识别障碍?带着这些问题我们开始学习第一条指令PTP运动指令 运动指令在示教器
2021-09-01 06:13:36
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业机器人的运动轨迹进行示教或离线编程,可节约
2015-01-23 15:02:27
;人工焊接难度大.加装传感器后的应用优势:加装激光焊缝跟踪传感器,使复杂焊接工序简单化,机器人与焊缝跟踪传感器只需标定一次,传感器将焊缝数据传输给机器人,机器人在接受数据后进行精准定位并焊接,同一种工件无需重复示教标定,大大减少了因工件异形带来的焊接难度,提高生产效率。
2020-12-02 09:36:09
于机器人控制系统当中。那么今天,我们就通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现。 机器人控制系统 机器人控制系统相当于机器人的大脑,是决定机器人功能和性能的主要部分,它一般分为机器人
2023-02-24 17:05:21
ABB机器人示教器控制器故障维修苏州吉海机电设备有限公司机器人维修中心,ABB机器人示教器控制器故障维修 苏州吉海是一家专业的自动化工控产品维修企业,公司有充足的备件和优良的维修工程师,可为客户提供
2020-10-12 15:43:12
全部按下按钮时,系统变为电机关(MOTORS OFF)模式。为了安全使用示教器,必须遵循以下原则使能设备按钮(Enabling device)不能失去功能编程或调试的时候,当机器人不需要移动时,立即松开
2020-09-18 16:56:53
一次机器人。②如果不行,在示教器查看是否有更详细的报警提示,并进行处理。③重启。④如果还不能解除则尝试B启动。⑤如果还不行,请尝试P启动。⑥如果还不行请尝试I启动(这将机器人回到出厂设置状态,小心)。4
2020-08-19 10:32:02
丰富的知识储备。它们可以涵盖各种领域的知识,并能够回答相关问题。灵活性与通用性: AI大模型机器人具有很强的灵活性和通用性,能够处理各种类型的任务和问题。持续学习和改进: 这些模型可以通过持续的训练
2024-07-05 08:52:55
应用。同时DeX-Platform也在不断的丰富机器人的运动模式,提升机器人运动的速度和性能,帮助您更好的实现应用需求。机器人拖动示教及同步复现功能DeX-Platform提供完善的机器人动力学功能支持
2018-03-02 14:42:06
KUKA库卡C4机器人驱动器故障报警维修库卡机器人维修内容包括库卡机器人示教器维修,KUKA伺服驱动模块维修,库卡机器人伺服电机维修,KUKA机械手PC工业电脑维修,库卡机器人电路板维修,库卡机器人
2021-09-17 07:09:52
得到了广泛的应用,在我国有大量的需求,工业机器人系统包括:机器人示教器、控制器、机器人本体三部分组成。本课题所研究的是:基于可裁剪的WinCE6.0嵌入式操作系统的一种基于WinCE的工业机器人示教器
2015-07-23 22:14:55
全国区地区高价回收: (*** 同步V信) 全新/拆机不限,型号不限。收购的品牌型号有:大量回收:回收ABB变频器/ABB机器人示教器,回收发那科伺服/发那科机器人示教器,回收安川伺服/安川机器人示
2021-08-18 14:31:15
。这种机器人还可以接受示教而完成各种简单的重复动作,示教过程中,机械手可依次通过工作任务的各个位置,这些位置序列全部记录在存储器内,任务的执行过程中,机器人的各个关节在伺服驱动下依次再现上述位置,故这种
2015-01-19 10:58:38
。 4、需要看造工 选择有研发和生产能力的机器人厂家的产品,需要看机器人整体制造工艺是否是精良的。 软件方面运行是否顺畅。 5、需要看是否开放接口,有能力定制应用 如果开放接口,个性化定制
2020-06-12 17:04:58
、提升操控体验之外,还能满足各种个性化的需求,推动智能机器人产业链的形成,走向产业化。通常,人工智能都会涉及一定程度的机器学习,其中算法通过使用已知的输入和输出,以某种方式“训练”,对特定输入进行快速响应
2017-08-16 10:44:45
机器人是先进的机电一体化数字化装备,集机械、电子、控制、计算机、传感器、人工智能等多学科高新技术于一体,技术附加值很高。对提高产品的质量与产量、保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率
2015-09-02 14:03:18
行初始化,冷启动后故障消除,具体的操作过程如下:断开控制器电源,打开控制器电源同时按住示教器上的F1及F5功能键→3→1→MENUS→插入MC存储卡→4,variables→72,对机器人进行命名,确保
2020-09-07 15:40:22
企业环境的智能喷涂机器人尤为重要。智能应用的升级1.效率高、易维护直接通过人工持枪示教,同时编程、效果显示。作业速度快,可适应快速流水线。可插件结构和模块化的设计,快速更换元器。部件维护可接近性好,便于
2021-03-10 09:23:59
模式,逐渐向以工业机器人为主导的生产模式转变。但是,随着科技的发展和进步,原有单纯采用通过示教和预编程来实现自动化工作的机器人产品在柔性生产能力上已经很难满足现代生产的需要,引入具备机器视觉功能的机器人
2021-04-29 09:42:45
,通过示教器调出相应工件的焊接程序,按下启动键,机器人通过接触传感器找到焊接起始点,并按照示教程序进行焊接。在焊接过程中,电弧传感器实时检测焊缝,并根据偏差量调整示教轨迹,完成焊接任务。同时,操作人员可以
2018-03-13 09:15:48
示教器怎么设计最好用?
机器人编程,看是一种程序设计,实际上更多的是建模数据设计。
所以,
示教器更接近3d建模最好,例如,一定要有sin,cos等三角形和圆形计算按钮。
我的三角形学得很烂,就不多说了。
要说编程功能的话,一定要有api表,可以一键调用。
我没有上过机,如果说错了请不要介意。
2023-05-24 15:32:41
大量回收全新发那科示教器,新旧不限。发那科示教器回收,FANUC机器人示教器回收价格表,回收发那科示教器,FANUC示教器回收,回收FANUC示教器,回收机器人示教器,回收abb示教器,回收莫特曼示
2020-05-12 13:26:06
席文姣,陈帝伊,马孝义(西北农林科技大学 水利与建筑工程学院,陕西 西安712100)0引言如何设计智能灭火机器人控制器?控制器是智能机器人处理和控制信息的主体,它直接决定了机器人的行为和性能
2019-07-31 06:23:18
(1)气动式工业机器人这类工业机器人以压缩空气来驱动操作机,其优点是空气来源方便,动作迅速,结构简单造价低,无污染,缺点是空气具有可压缩性,导致工作速度的稳定性较差,又因气源压力一般只有6kPa左右
2017-12-01 10:47:32
工业机器人的控制系统的主要任务是控制工业机器人在工作空间中的运动位置、姿态和轨迹、操作顺序及动作的时间等项目,主要功能有示教再现功能和运动控制功能。示教再现控制的主要内容主要包括示教及记忆方式和示教
2017-10-20 10:03:57
故障;2.ZN-IRW01工业机器人故障诊断实训平台可满足现场工业机器人技术应用所需要的功能,教师可以在控制系统中去设置故障,学生可通过人机交互界面查看机器人故障提示信息,并对故障点进行检测维修;3.可实现工业机器人的示教编程,机器人编程指令的学习。二、基本功能:本工业机器人故障诊断实训系统以工业机器
2021-07-01 12:32:12
)机器人的系统结构一台通用的工业机器人,按其功能划分,一般由3个相互关连的部分组成:机械手总成、控制器、示教系统,如图所示。机械手总成是机器人的执行机构,它由驱动器、传动机构、机器人臂、关节、末端操作器
2017-12-15 10:25:19
模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线
2018-11-23 10:40:38
成正比的模拟信号。如果没有这样的速度传感器,可以通过对检测到的位置相对于时间的差分得到速度反馈信号。㈥、机器人力检测力传感器通常安装在操作臂下述三个位置:1、安装在关节驱动器上。可测量驱动器/减速器自身
2018-10-12 10:16:22
为本科、职 业技术学院、培训机构机器人系统教学培训的操作平台。系统采用真实焊接机器人的设计理念, 学生可通过学习实践,深入了解变位机和送丝机的工作原理,并掌握机器人基础知识、基本操 作、示教编程、自动焊接
2021-07-01 13:39:38
模式下机器人运行速度设定看情况进行设定,一般为10%——50%之间都可以; D:给库卡机器人手动上电,按下库卡示教器kukasmartpad使能上电按钮不松开,如下图: 上电后示教器上状态栏状态: E
2020-09-04 15:45:41
“珍珠”存放区拿取“珍珠”,并放置到位于下龙区的“岛”上。2、手动机器人可将“珍珠”放在对方已放在“岛”上的“珍珠”上要求:1、手动机器人必须通过电缆连接的遥控器或使用红外、可见光、声波摇控器操作。2
2012-06-20 17:31:51
手机同步微信:185 5025 5583 昆山苏州上海回收示教器ABB示教器库卡示教器发那科示教器高价回收全新发那科机器人示教器回收发那科示教器出售现货 回购回收ABB机器人示教器回收kuka机器人
2020-06-20 08:07:44
就是想问下,机器人关机的时候,是不是要等到示教器出现到“connect……”画面之后才可以断电,还是在示教器上选择了关机后,马上就可以断电?
2015-01-16 10:30:00
求助,,,当安川机器人运行过程中突然按下示教器上停止按钮时然程序指针调到程序第一步(NOP步)执行程序应该怎么编写?
2017-12-02 01:32:49
求教 想做一个能够自己按电梯按钮的机器人先给机器人输入数字 怎样才能让机器人自己扫描到输入的数字 并做出动作初中毕业 文化太低 有没有现成的软件和程序
2016-07-05 22:08:11
教点使得吸盘左边平行于电芯左边并且有一个固定距离。 让机器人把电池吸起,示教一个点放置电芯到载盘上,电芯的边按载盘所在工位的要求进行对齐。 (图2) 不用模板实现ROI跟随 思路是取得初始电芯
2021-04-07 12:06:47
以及效率,严重时可能导致焊接失败,工件报废。为了解决上述的这种问题,目前一般是通过提高工装夹具的精度,增加机器人示教的轨迹数量和频率等方案,成本提升很高,可重复利用性也不高,传统的机器视觉在工业上已经
2020-03-16 14:57:05
焊接机器人的原理:焊接机器人是一种高度自动化的设备,焊接机器人的基本工作原理是示教再现,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数
2020-11-16 16:18:45
到达饮水机。机器人上部安装有一个舵机,可以按下饮水机按钮让饮水机出水,下面的杯子接水。接水完毕之后机器人可以转身沿黑线回来将水送到主人手里。它还安装有红外传感器,如果有人走过它前面,它会停下来等人走过之后
2016-03-25 14:28:28
好程序,全自动焊锡机机器人会精准地完成每个动作,替代重体力重复操作工作。 全自动焊锡机机器人内含BASIC 解译器,简单的编程方式,直接手柄示教,可以直接输入焊点坐标,也可示教焊点位置,可再现焊点位置
2017-03-08 16:33:16
。使用i.MX6+Android硬件、软件平台,结合各类丰富的传感器、控制器、视频输入,以及图像识别、人工智能等算法,使得机器人示教器上升到智能化的层次成为可能。`
2017-03-16 14:42:26
研发了基于CAN 总线的新型机器人示教盒系统,采用ARM 芯片为核心,并在其上运行了实时操作系统μC/OS-II。设计了一套CAN 网络通讯协议,实现了
2009-09-09 09:35:13 23
23 通过介绍目前喷涂机器人的研究现状,引出在工业级计算机IPC 与运动控制卡的平台上研制六自由度喷涂机器人的可行性。在参考其它工业机器人的示教检查的基础上,本文提出符
2009-12-19 15:27:5118 深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:25:07
深圳泰科智能TB6系列协作机器人是泰科智能自主研发的6轴轻型协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。采用自主设计研发RJSII系列关节模组,既轻便灵活、运行平滑柔顺,同时
2023-04-17 15:31:15
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-17 17:49:50
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-19 10:58:47
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
2023-04-19 11:14:26
迈步机器人H系列 是全球首款采用柔性驱动器作为动力输出的外骨骼机器人。首创柔性驱动器作为动力输出,实现主动式康复训练专利生物力学模型分析步态,为用户提供精准、智能、个性化的康复训练方案前瞻性、多中心、随机对照注册临床试验,超百例样本量,充分验证有效性和安全性
2023-09-20 17:25:48
泰克机器人示教仿真软件视频(孙斌,段晋军)
2013-09-17 10:02:0274 人机协作机器人全球领导企业丹麦优傲机器人公司(Universal Robots)提出,消费者对于产品独特性、个性化的需求,将促使制造商在产品制造中找回人性化元素,进一步推动“人机协作产业“的发展。
2016-10-25 16:29:20859 码垛机器人示教器的设计与实现_朱琳
2017-01-18 20:24:573 系统中。 这就对现阶段的机器人技术提出了要求,其中,示教技术就是重要的一项。机器人示教技术指的是通过编程指挥机器人去完成某一具体任务。编程的过程即为示教过程。 ABB机器人示教器(FlexPendant)由硬件和软件组成,其本
2017-09-29 16:59:088 满足日益增长的复杂性要求,机器人不仅要能长期稳定地完成重复工作,还要具备智能化、网络化、开放性、人机友好性的特点。作为工业机器人继续发展与创新的一个重要方面,示教技术正在向利于快速示教编程和增强人机协作能力的方向发展。 工
2017-10-09 16:03:051 现场使用的安川MOTOMAN-ES165N 机器人负载能力为165 公斤(有效工具负载,实际各关节力量更大),操作不慎会引起严重安全事故,可能导致人员受伤或死亡。现场示教时,严格控制速度示教机器人,观察清楚机器人各关节位置,零件位置再动作,示教前对机器人区域清场,不许无关人员进入。
2017-10-17 17:01:4422 方法包括示教、编辑和轨迹再现,可以通过示教盒示教和导引式示教两种途径实现。由于示教方式实用性强,操作简便,因此大部分机器人都采用这种方式。离线编程方法是利用计算机图形学成果,借助图形处理工具建立几何模型,通过一些规划算法来获取作
2017-11-17 15:59:4315 ABB IRB4600机器人的运动学特性,进行了其正逆运动学的求解。参照真实示教器,进行了虚拟示教器的开发:利用正则表达式设计了RAPID语言解释器,对机器人的运动轨迹进行了规划,用于运动指令的解析。以真实机器人车间为例,进行了虚拟示教场景的搭
2018-02-26 10:19:372 工业机器人示教编程和离线编程,有何区别?
2018-03-05 15:59:5221207 一般来说,操作FANUC机器人时,需要使用FANUC示教器iPendant来对机器人进行示教、做信号配置等。对于熟练使用示教器的用户来说,示教器就是他们控制机器人的工具。没有示教器,还能控制机器人吗?答案是肯定的。
2018-05-30 16:09:2512115 
示教器是进行机器人的手动操纵、程序编写、参数配置以及监控用的手持装置。
2018-08-10 09:42:2969379 作为并联机器人继续发展与创新的一个重要方面,拖动示教的应用将为并联机器人调试技术趋向快速、简便的方向发展。秉承不断创新突破自我的勃肯特,在11月正式通过拖动示教在并联机器人上的内部测试,实现该项技术在并联机器人应用的零突破。
2018-12-07 17:14:081705 本文档的主要内容详细介绍的是机器人Rt800示教器的操作用户手册资料免费下载。
2018-12-17 08:00:004 机器人编程为使机器人完成某种任务而设置的动作顺序描述。示教是机器人编程的一种重要方式,通过预先设置好机器人要达到的位置,以指令描述出来。本手册旨在帮助读者学习和掌握汇川的机器人示教软件 InoTeachPad 的编程方法。
2019-03-12 08:00:002 本文档的主要内容详细介绍的是发那科机器人示教手册DeviceNet配置流程详细说明。
2020-05-26 08:00:0019 机器人编程为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编制方法有两种,示教编程方法和离线编程方法。其中示教编程方法包括示教、编辑和轨迹再现,可以通过
2020-07-23 11:42:4845501 随着科技的进步,越来越多企业都转型往智能制造行业方向发展了,这也是工业机器人为什么会快速普及的原因了,就拿拖动示教喷涂机器人来说,它具有免编程喷涂、喷涂质量高、效率高以及回报率高等优势特点,帮助企业
2020-08-11 09:52:032050 的编程方法主要有三种: 1)示教编程,是一项成熟的技术,它是目前大多数工业机器人的编程方式,采用这种方法,程序编制是在机器人现场进行的。 2)离线编程,是在专门的软件环境下,用专用或通用程序在离线情况下进行机器
2020-09-25 11:42:337314 加入 Spotify 之前,我曾在 Netflix 从事个性化算法和主页面内容的工作。我以前的经验与现在我在 Spotify 担任工程副总裁兼机器学习负责人的工作非常相似。但是,个性化 Spotify 的主页面会带来一系列新的挑战,我将稍后分享。
2020-11-18 17:26:453318 基于深度学习的机器人示教系统设计与实现
2021-06-30 15:53:3780 机器人刷入模块化的视觉软件包后,即在机器人示教器上即可完成相机设置及校准、视觉程序设定等一系列流程,在机器人TP程序内使用指令调用视觉程序(图4)即可实现视觉定位并引导机器人准确抓取工件
2022-07-23 10:01:422739 焊接机器人示教器的作用有哪些?主要用于设置焊接参数、焊接路径、远程监测示教减少伤害事故。
2023-02-12 09:27:444668 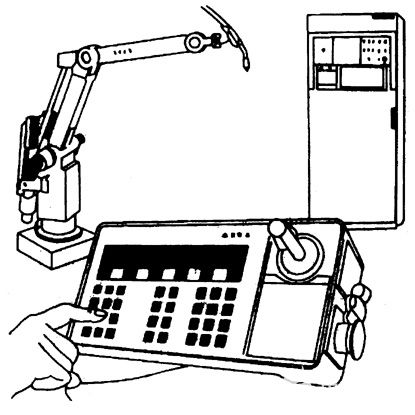
工业机器人系统主要由机器人(机械手)本体、机器人控制器、示教器等组成。那么,示教器是什么?示教器简称TP,它是用户与机器人之间相互交流的重要装置。用户可以通过操作示教器来查看机器人当前位置、寄存器
2022-09-08 17:21:172362 
”是什么?示教器全称叫做“示教编程器”,是一种应用于机器人控制的手持式装置。在机器人的运动控制系统中,示教器通过通讯电缆连接控制柜或者运动控制器,通过设置运动参数与编写
2023-03-06 13:52:136881 
器”是什么? 示教器全称叫做“示教编程器”,是一种应用于机器人控制的手持式装置。在机器人的运动控制系统中,示教器通过通讯电缆连接控制柜或者运动控制器,通过设置运动参数与编写机器人的运动路径,即可让机器人按照编写
2023-07-14 11:45:054791 
焊接机器人是现代制造业中广泛使用的自动化设备,它可以高效、精确地进行焊接工作,提高生产效率和焊接质量。然而,为了让机器人能够执行任务,需要进行示教操作,将所需的动作和路径录入机器人的控制系统。本文将
2023-08-02 17:56:532240 
很多发展和新的应用。其中一个重要组成部分,被称为“机器人示教器”。示教器是什么?是一种应用于机器人控制的手持式装置。在机器人的运动控制系统中,示教器通过通讯电缆连
2023-08-04 08:40:051546 
朗宇芯HT机器人示教器系列,是专用于工业机器人、注塑、桁架机床、数控系统等行业的移动式人机交互终端,它集显示、触摸、功能按键于一体,满足不同工艺应用场景下的人机交互需求。产品定位:帮助机器人企业提升
2023-08-24 15:08:29991 
目前机器人示教器通过摇杆;按键;旋钮等方式对机器人的运动做出控制,结合示教器内部的系统软件,将数据发送至机器人控制系统,以此达到示教器的输入目的,当机器人运动时,其运动状态等信息需要展示给用户,则机器人系统将数据传输到示教器,示教器对机器人运动状态进行相关的显示,以此达到人际交互的目的。
2021-10-28 10:04:522105 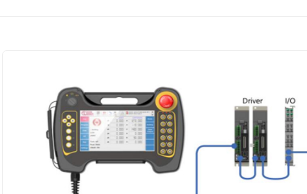
难的问题,且自带的监控功能可提供安全的使用保障。“示教器”是一种手持装置,广泛应用于机器人控制系统中。它通过通讯电缆连接控制柜或运动控制器,可以设置运动参数和编写机
2024-01-19 08:00:23969 
示教器通常也叫示教编程器或示教盒,是进行机器人的手动操纵、程序编写、参数配置以及监控用的手持装置;是机器人控制系统的核心部件,是一个用来注册和存储机械运动或处理记忆的设备,该设备是由
2024-03-23 08:42:231996 工业机器人示教器是一个关键的人机交互设备,通过它操作者可以操作工业机器人运动、完成示教编程、实现对系统的设定、故障诊断等。以下是工业机器人示教器上常见按钮的功能介绍: 一、紧急停止与安全相关按钮
2024-09-04 09:44:449992 在现代制造业中,焊接机器人广泛应用于提高生产效率和焊接质量。而焊接机器人示教模式的正确设置,是确保自动化焊接过程精确执行的重要环节。今天创想智控焊缝跟踪系统小编带大家了解焊接机器人示教模式怎么设置
2024-09-09 17:55:351451 
随着拖动示教在协作机器人、并联机器人上的应用,将调试技术趋向快速、简便的方向发展,满足生产企业应用机器人进行及时、高效的生产需求,以及在工业4.0和“中国制造 2025”的背景下,适应现代工业快速
2024-10-23 15:52:162676 
。DMC600M拖动示教控制系统 拖动示教通常使用以下步骤: 示教模式切换:将机器人切换到示教模式,使其能够记录操作员的动作。 手动示教:操作员通过手动移动机器人的末端执行器,来
2024-10-23 15:52:161472 。其目标是在交互扳手和机器人运动之间实现所需的导纳特性。 拖动示教通过直接在机器人末端或者连杆上施加一定方向的力,控制器力检测系统估算外部拖动力矩,引导机器人做相应的跟随运动,然后记录拖动
2024-10-23 15:52:161923 的移动速度。 拖动示教技术简介 拖动示教技术,是一种创新的机器人编程方法,它允许操作人员直接通过拖动喷涂机器人的末端执行器(如喷枪),来指导机器人完成特定的喷涂任务。这一技术极大
2024-11-20 15:20:581212 的机器人运动轨迹示教主要依赖于有线示教器,这些示教器需要通过控制线与控制柜相连。由于电缆线一对一连接的特性,通常一个示教器只能控制与之相连的一个机器人本体。这意味着:成
2024-11-12 11:44:251314 智能拖动示教喷涂机器人是近年来工业自动化领域的一项重要创新,它的出现不仅极大地提升了喷涂作业的效率和质量,还为传统制造业的转型升级提供了有力支持。本文将从智能拖动示教喷涂机器人的技术特点
2024-12-12 10:27:201149 
松下机器人示教编程教学课件(新)
2025-06-11 17:23:330
 电子发烧友App
电子发烧友App











 工商网监
工商网监
评论