





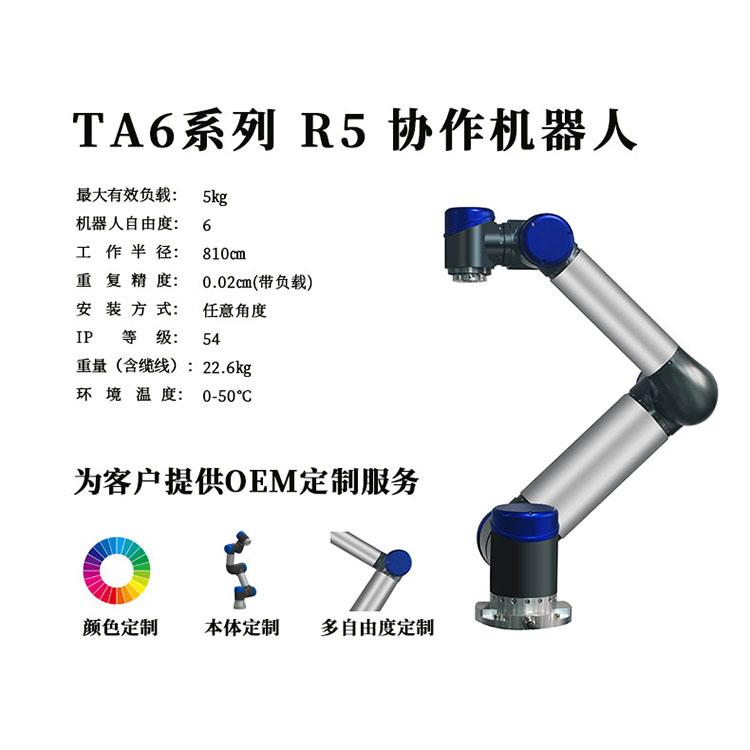
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求。既有强大的通用性、 协作性与开放性,适用于物流装配、流水线生产、上下料、AGV、3C电子、科研、医疗等行业。TA6系列协作机器人安装简单(安装方式任意角度)及用途多样化,不管您是什么行业或者产品,都可以很好的融入到各个生产流程,提升您工厂的生产效率,并更好的节约人工成本。
| 型号Type | TA6-R5 | |
| 性能 | ||
| 功耗 | 使用一般程序约250w | |
| 环境温度 | 0-50°C | |
| 湿度 | 90%相对湿度(非冷凝) | |
| 协作 | 可调防碰撞安全功能 | |
| 规格 | ||
| 有效载荷 | 5kg | |
| 高度 | 1067mm | |
| 工作半径 | 810mm | |
| 自由度 | 6个旋转关节(自由度) | |
| 编程 | 7英寸触屏示教器编程 | |
| 移动 | ||
| 重复精度 | ±0.02mm,带有效载荷 | |
| 轴 | 工作范围 | 最大速度 |
| 基座(1轴) | ±360° | ±150°/s |
| 肩部(2轴) | ±180° | ±150°/s |
| 肘部(3轴) | ±180° | ±150°/s |
| 腕部1(4轴) | ±180° | ±180°/s |
| 腕部2(5轴) | ±180° | ±180°/s |
| 腕部3(6轴) | ±360° | ±180°/s |
| 典型末端执行器 | 1.5m/s | |
| 特点 | ||
| IP等级 | IP54 | |
| ISO洁净室等级 | 6 | |
| 噪声 | <60dB | |
| 机器人安装 | 任意角度 | |
| 物理 | ||
| 占地面积 | Ø172mm | |
| 材料 | 铝,钢 | |
| 执行器连接类型 | EtherCAT | |
| 电缆长度 | 6m | |
| 重量(含缆线) | 22.6kg | |



















