我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。
2018-02-06 08:49:06 15411
15411 
基于导纳控制的机器人拖动示教是一种常用的机器人控制策略,它允许人与机器人直接互动,实现自然、直观的控制。在导纳控制中,机器人被建模为一个力控制系统,其动力学特性由一个等效的导纳(Admittance)模型描述。导纳模型类似于弹簧和阻尼器的组合,用来描述机器人对外部力和运动的响应。
2023-12-04 09:48:338088 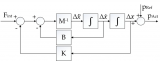
机器人编程需要什么软件
2023-11-01 07:34:30
在前一篇文章中讲了机器人与编程的区别,但总感觉讲的比较空泛,这篇文章继续讲讲那些区别。计算机编程和机器人编程最大的区别就是一个是控制虚拟的,一个是真实世界的东西。计算机编程,你控制一个角色直走100
2021-09-01 07:12:05
1、机器人的控制系统“控制”的目的是使被控对象产生控制者所期望的行为方式。 .“控制”的基本条件是了解被控对象的特性。 “实质”是对驱动器输出力矩的控制。2、机器人示教原理机器人的基本工作原理是示教
2021-09-13 08:40:55
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业机器人的运动轨迹进行示教或离线编程,可节约
2015-01-23 15:02:27
ABB机器人示教器控制器故障维修苏州吉海机电设备有限公司机器人维修中心,ABB机器人示教器控制器故障维修 苏州吉海是一家专业的自动化工控产品维修企业,公司有充足的备件和优良的维修工程师,可为客户提供
2020-10-12 15:43:12
欢迎关注Jungle的Motoman机器人离线编程专栏系列文章:Motoman机器人离线编程——Motocom32开发简介Motoman机器人离线编程——Visio Studio环境配置
2021-09-07 07:33:42
ZNH-KH01工业机器人应用编程考核设备有什么功能?ZNH-KH01工业机器人应用编程考核设备是由哪些部分组成的?
2021-08-16 07:45:01
[亚信线上教学] AxRobot机器手臂示教编程教学视频I -- 离线编程亚信电子AX58200 AxRobot支持离线与线上机器手臂示教编程功能。这个视频介绍AX58200 AxRobot
2022-03-08 10:07:30
得到了广泛的应用,在我国有大量的需求,工业机器人系统包括:机器人示教器、控制器、机器人本体三部分组成。本课题所研究的是:基于可裁剪的WinCE6.0嵌入式操作系统的一种基于WinCE的工业机器人示教器
2015-07-23 22:14:55
、离线编程仿真单元及安全防护设施等部分组成。集成多种机器人工业应用案例,实现工业机器人应用多功能教学实操。包含教学内容有机器人基本结构、基本操作、参数配置、示教编程、简单语言编程等基础实操、复杂轨迹
2021-07-01 13:43:02
软件编程界面和运行环境。重、难点重点:机器人仿真软件编程界面的操作。难点:机器人仿真软件运行环境的操作。教学过程走进机器人世界机器人的诞生机器人的发展机器人家族认识能力风暴智能机器人脚...
2021-09-01 06:17:46
机器人的主要技术功能被称为“可编程”和“示教再现”。1962年美国推出的一些工业机器人的控制方式与数控机床大致相似,但外形主要由类似人的手和臂组成。后来,出现了具有视觉传感器的、能识别与定位的工业机器人
2015-01-19 10:58:38
细小复杂部位需要人工补装、且只适合平板工件。第三种是智能机器人,它解决了复杂工件,虽在一定程度上实现了离线编程,但编程速度较慢,运动轨迹柔性且慢、需要技术人才编程、示教,以及后期保养苛刻。现有的喷涂机器人
2021-03-10 09:23:59
目录概述行走轴模型拆分行走轴模型导入仿真软件创建行走轴机械装置外部轴配置向导插件安装虚拟机器人系统创建行走轴系统配置机器人安装到行走轴行走轴运动控制文已经首发在个人微信公众号:工业机器人仿真与编程
2021-09-07 08:57:47
ZNH-KH01工业机器人应用编程考核设备一、概述工业机器人应用编程考核设备能满足工业机器人应用编程1+X相关标准及技术规范,设备使用智能连接器连接,整个车间设备互联互通,实现大数据交换。二、工业
2021-07-01 11:06:26
模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线
2018-11-23 10:40:38
手机同步微信:185 5025 5583 昆山苏州上海回收示教器ABB示教器库卡示教器发那科示教器高价回收全新发那科机器人示教器回收发那科示教器出售现货 回购回收ABB机器人示教器回收kuka机器人
2020-06-20 08:07:44
就是想问下,机器人关机的时候,是不是要等到示教器出现到“connect……”画面之后才可以断电,还是在示教器上选择了关机后,马上就可以断电?
2015-01-16 10:30:00
焊接机器人的原理:焊接机器人是一种高度自动化的设备,焊接机器人的基本工作原理是示教再现,即由用户导引机器人,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数
2020-11-16 16:18:45
自己开发的机器人图形化编程软件从2005年起就开始搞机器人教学了,至今每年夏天都举行机器人夏令营。10年来一直尝试做一款简单稳定好用的机器人编程软件,上次做的类似于app inventor 的积木
2016-07-02 20:15:27
萌新求助,求机器人编程的案列
2021-10-21 07:27:29
(机器编程系列文章二)嵌入君上一篇《机器人程序员正朝我们走来,大家准备好了吗?》文章中,谈到了我个人的观点,在一个编程平台中,是否算是机器编程,需要看机器完成的代码占总编码的量和对编程人员的技术要求
2021-09-09 06:45:54
变得更加普遍,同时,它们所具有的功能也会越来越多。机器人示教器是机器人控制系统中的重要组成部分,主要实现用户与机器人控制器,用户与机器人本体之间的通信。机器人控制器接收到示教器的运动指令后经过译码、逻辑
2017-03-16 14:42:26
雅马哈机器人编程手册
2021-02-04 12:27:32
和YAMAHA的SCARA机器人示教、手动操纵、工具及用户坐标系的定义及建立、I/O及配置、指令与编程等实用内容。基于具体案例,讲解了机器人系统的编程、调试、自动生产的过程。通过学习本书,使读者对工业
2018-10-29 17:03:22
TA6-R5协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
2023-04-17 17:49:50
深圳泰科智能TA6系列协作机器人是泰科智能自主研发的6自由度的协作机器人,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
2023-04-19 11:14:26
泰克机器人示教仿真软件视频(孙斌,段晋军)
2013-09-17 10:02:02 74
74 EPSON机器人编程更请看SPEL 语言。
2016-05-09 09:41:4122 随着机器人应用领域越来越广,传统的示教编程这种编程手段有些场合变得效率非常低下,于是离线编程应运而生,并且应用越来越普及。但初用离线编程的朋友,总会被最后生成轨迹的误差所困惑,而导致这些误差的原因
2016-07-28 15:06:473420 机器人编程文档,感兴趣的可以看看。
2016-12-14 15:07:031 LogenStudio机器人离线仿真编程软件8-5
2016-12-25 21:34:570 来自北京华航唯实的技术团队研发了国内首款机器人离线编程软件RobotArt,RobotArt利用成熟的CAD/CAM技术,结合工业机器人离线编程技术,形成了机器人离线编程系统,提高机器人编程效率
2017-01-06 11:16:1110502 
码垛机器人示教器的设计与实现_朱琳
2017-01-18 20:24:573 系统中。 这就对现阶段的机器人技术提出了要求,其中,示教技术就是重要的一项。机器人示教技术指的是通过编程指挥机器人去完成某一具体任务。编程的过程即为示教过程。 ABB机器人示教器(FlexPendant)由硬件和软件组成,其本
2017-09-29 16:59:088 满足日益增长的复杂性要求,机器人不仅要能长期稳定地完成重复工作,还要具备智能化、网络化、开放性、人机友好性的特点。作为工业机器人继续发展与创新的一个重要方面,示教技术正在向利于快速示教编程和增强人机协作能力的方向发展。 工
2017-10-09 16:03:051 机器人研究经历了3 个阶段,即示教再现编程阶段、离线编程阶段和自主编程阶段。因技术尚不成熟,目前,在国内外生产中应用的机器人系统大多处于示教再现编程阶段。本实验室采用首钢莫托曼公司生产的弧焊机器人
2017-10-13 16:03:1010 机器人编程【robot programming】为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编制方法有两种,示教编程方法和离线编程方法。其中示教编程
2017-11-17 15:59:4315 机器人编程为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编制方法有两种,示教编程方法和离线编程方法。
2017-11-24 15:32:277492 对工业机器人来说,主要有三类编程方法:在线编程、离线编程以及自主编程三类。在当前机器人的应用中,手工示教仍然主宰着整个机器人焊接领域,离线编程适合于结构化焊接环境,但对于轨迹复杂的三维焊缝,手工示教
2018-01-31 13:34:089435 针对当前工业机器人示教中,虚拟示教方式存在场景真实度低、灵活性差等问题,对T业机器人的虚拟示教进行了研究,应用虚拟现实技术,提出了一种面向ABB IRB4600系列机器人的虚拟示教设计方法。分析了
2018-02-26 10:19:372 本文开始详细介绍了焊接机器人的编程技巧,其次介绍了安川焊接机器人编程教程,最后阐述了焊接机器人的示教编程与离线编程区别及焊接机器人应用中存在的问题和解决的措施。
2018-02-28 13:43:4190268 
工业机器人示教编程和离线编程,有何区别?
2018-03-05 15:59:5221207 我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。
2018-04-02 10:59:4411267 
机器人的主要特点之一是其通用性,是机器人具有可编程能力是实现这一特点的重要手段。机器人编程必然涉及机器人语言。机器人语言是使用符号来描述机器人动作的方法,它通过对机器人的描述,使机器人按照编程者的意图进行各种操作。
2018-05-01 17:32:0036323 多传感器融合技术的建模与仿真。随着机器人智能化的提高,传感器技术在机器人系统中的应用越来越重要。因而需要在离线编程系统中对多传感器进行建模,实现多传感器的通讯,执行基于多传感器的操作。
2018-05-10 15:02:256915 一般来说,操作FANUC机器人时,需要使用FANUC示教器iPendant来对机器人进行示教、做信号配置等。对于熟练使用示教器的用户来说,示教器就是他们控制机器人的工具。没有示教器,还能控制机器人吗?答案是肯定的。
2018-05-30 16:09:2512115 
离线编程,我的理解就是在离线编程系统的软件中通过鼠标和键盘操作机器人的三维图形做事情(对比在线示教通过示教器控制机器人)。 典型的离线编程系统软件架构包括建模模块、布局模块、编程模块和仿真模块。
2018-07-28 10:01:5410373 示教器是进行机器人的手动操纵、程序编写、参数配置以及监控用的手持装置。
2018-08-10 09:42:2969379 目前工业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对工业机器人的运动轨迹进行示教或离线编程,可节约大量的编程时间,提高生产效率和加工质量。
2018-10-08 14:18:005180 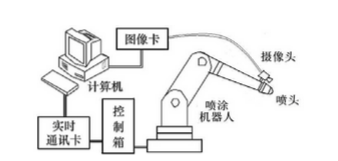
通常来讲,机器人编程可分为示教在线编程和离线编程。我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。
2018-09-25 17:48:0014925 机器人的开发语言一般为C、C++、C++ Builder、VB、VC等语言,主要取决于执行机构(伺服系统)的开发语言;而机器人编程分为示教、动作级机器人编程语言、任务级编程语言三个级别。
2018-10-19 10:36:408596 通常来讲,机器人编程可分为示教在线编程和离线编程。我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。
2018-10-24 11:43:3711465 通常来讲,机器人编程可分为示教在线编程和离线编程。我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析
2019-01-01 11:21:004452 
作为并联机器人继续发展与创新的一个重要方面,拖动示教的应用将为并联机器人调试技术趋向快速、简便的方向发展。秉承不断创新突破自我的勃肯特,在11月正式通过拖动示教在并联机器人上的内部测试,实现该项技术在并联机器人应用的零突破。
2018-12-07 17:14:081705 我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。
2019-01-21 17:27:004679 
机器人来说,主要有三类编程方法:在线编程、离线编程以及自主编程三类。在当前机器人的应用中,手工示教仍然主宰着整个机器人焊接领域,离线编程适合于结构化焊接环境,但对于轨迹复杂的三维焊缝,手工示教不但费时
2019-03-05 17:39:072157 机器人编程为使机器人完成某种任务而设置的动作顺序描述。示教是机器人编程的一种重要方式,通过预先设置好机器人要达到的位置,以指令描述出来。本手册旨在帮助读者学习和掌握汇川的机器人示教软件 InoTeachPad 的编程方法。
2019-03-12 08:00:002 通常来讲,机器人编程可分为示教在线编程和离线编程。我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。
2019-05-13 16:15:139573 我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。
2019-05-14 16:53:044329 机器人编程【robotprogramming】为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编制方法有两种,示教编程方法和离线编程方法。
2019-08-15 17:41:3218536 工业机器人编程怎么入门呢?这是一个值得探讨的问题,随着工业机器人使用量的不断增加,人们对工业机器人系统也有了初步的了解。众所周知,针对不同的工件需及时更改机器人编程,才能保质保量的完成生产任务。下面就为大家带来工业机器人编程的相关知识。
2019-10-15 14:41:4510769 本文档的主要内容详细介绍的是工业机器人的详细资料和应用编程等培训资料概述包括了:1.掌握机器人的特征和分类;,2.了解机器人的历史、现状和发展;,3.熟悉工业机器人的结构和原理;,4.了解工业机器人工作过程,能进行示教基本操作;,5.了解工业机器人编程方式和语言特征。
2019-10-31 11:15:3639 当前的机器人被广泛用于焊接、装配、搬运及打磨等领域,所完成的工作越来越复杂,在这种形式下机器人的编程方式、编程效率和质量就显得越来越重要了。本文就给大家介绍下工业机器人编程语言,以及工业机器人的编程方式。
2020-05-13 16:11:457413 对于机器人的学习者和技术员来说,学习一款机器人后对自学其他机器人应能触类旁通,在各大机器人品牌中 FANUC机器人的编程、示教、使用规范是最细致的,学习 FANUC机器人编程后自学其他品牌的机器人会变得轻松。
2020-06-10 14:37:563497 机器人编程为使机器人完成某种任务而设置的动作顺序描述。机器人运动和作业的指令都是由程序进行控制,常见的编制方法有两种,示教编程方法和离线编程方法。其中示教编程方法包括示教、编辑和轨迹再现,可以通过
2020-07-23 11:42:4845501 随着科技的进步,越来越多企业都转型往智能制造行业方向发展了,这也是工业机器人为什么会快速普及的原因了,就拿拖动示教喷涂机器人来说,它具有免编程喷涂、喷涂质量高、效率高以及回报率高等优势特点,帮助企业
2020-08-11 09:52:032050 的编程方法主要有三种: 1)示教编程,是一项成熟的技术,它是目前大多数工业机器人的编程方式,采用这种方法,程序编制是在机器人现场进行的。 2)离线编程,是在专门的软件环境下,用专用或通用程序在离线情况下进行机器
2020-09-25 11:42:337314 极简单,快速部署便捷示教。基于节卡机器人首创无线示教和图形化编程技术,用户可在PAD、手机等移动终端对机器人进行实时远程操控和作业编辑。
2020-10-10 16:19:072626 对工业机器人来说,主要有三类编程方法:在线编程、离线编程以及自主编程三类。
2020-11-10 17:47:2521887 通常来讲,机器人编程可分为示教在线编程和离线编程。我们今天讲解的重点是离线编程,通过示教在线编程在实际应用中主要存在的问题,来说说机器人离线编程软件的优势和主流编程软件的功能、优缺点进行深度解析。示教在线编程在实际应用中主要存在以下问题1、示教在线编程过程繁琐、效率低
2020-12-26 09:10:551793 机器人编程是以调用编程模块指令让机器动起来为目的。通常需要编程的模块是已经写好存储在模块里的,格物斯坦表示:小朋友做的只是将模块以不同的方式拼接起来。儿童编程学习是探究编程语言的本质,一层一层把模块
2021-03-12 16:44:051396 焊接机器人的编程人员的工作内容是什么?焊接机器人作为用于焊接作业的自动化焊接设备,在各领域中深受欢迎,焊接机器人可以实现焊接过程自动化,焊接机器人的出现也提供了很多工作岗位,编程工作是焊接操作的重要一步,需要技术人员进行离线编程工作,带您了解焊接编程的内容。
2021-07-02 17:49:112622 基于深度学习的机器人示教系统设计与实现
2021-06-30 15:53:3780 机器人编程涉及的学科很多,集成应用(机器人编程和生产工艺)、机器人研发、电子电气、软件、机械、减速机、传感器等等。
2021-10-07 07:21:00114958 亚信电子AX58200 AxRobot支持离线与线上机器手臂示教编程功能。这个视频介绍AX58200 AxRobot EtherCAT从站七轴助力控制机器手臂解决方案的线上示教编程功能
2022-12-05 11:12:002069 焊接机器人编程方法有什么?所谓焊接机器人是从事焊接的工业机器人,广泛应用于汽车制造、造船、航空等领域。使用机器人时,首先要做好编程,使机器人能够按照既定的程序完成各种操作。焊接机器人主要有示教编程法、离线编程法、自主编程法三种。
2023-01-13 10:47:0115444 
机器人离线编程,是指操作者在编程软件里构建整个机器人工作应用场景的三维虚拟环境,然后根据加工工艺等相关需求,进行一系列操作,自动生成机器人的运动轨迹,即控制指令,然后在软件中仿真与调整轨迹,最后生成机器人执行程序传输给机器人
2023-02-08 09:53:203428 
焊接机器人示教器的作用有哪些?主要用于设置焊接参数、焊接路径、远程监测示教减少伤害事故。
2023-02-12 09:27:444668 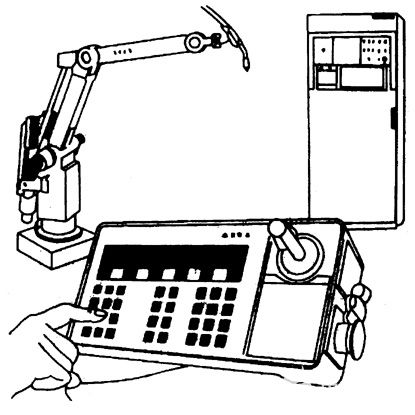
导语 HARMO EngSig5.0是一款将示教器功能集成为一体的APP,是海默机器人的上位机控制软件(示教器)。Engsign取代了传统的笨重手持式机器人示教器,将示教器功能集成到一款轻巧的APP
2023-05-30 16:40:141468 数据、IO分配情况、点动机器人、创建程序、编写机器人、对程序进行调试以及让机器人投入生产。示教器的优势特点一、对非协作型工业机器人进行编程,需要使用失能开关。这是一
2022-09-08 17:21:172362 
”是什么?示教器全称叫做“示教编程器”,是一种应用于机器人控制的手持式装置。在机器人的运动控制系统中,示教器通过通讯电缆连接控制柜或者运动控制器,通过设置运动参数与编写
2023-03-06 13:52:136881 
导语HARMOEngSig5.0是一款将示教器功能集成为一体的APP,是海默机器人的上位机控制软件(示教器)。Engsign取代了传统的笨重手持式机器人示教器,将示教器功能集成到一款轻巧的APP当中
2023-06-05 10:15:351788 
焊接是一项需要高度精准和稳定性的工作,而传统手工焊接存在劳动强度大、质量不稳定等问题。随着焊接机器人的引入,制造业得以实现自动化、高效率和一致的焊接过程。而这背后的关键是焊接机器人的编程。 一、离线
2023-06-25 16:11:451974 工业机器人编程 工业机器人一般使用的编程语言主要有:基于图形化编程界面的编程语言,如ABB的RobotStudio;基于高级编程语言的编程,如C++、Java等;特定领域的编程语言,如KRL
2023-06-26 14:03:151564 焊接机器人编程方法有什么?所谓焊接机器人是从事焊接的工业机器人,广泛应用于汽车制造、造船、航空等领域。使用机器人时,首先要做好编程,使机器人能够按照既定的程序完成各种操作。焊接机器人主要有示教编程法、离线编程法、自主编程法三种,下面焊接机器人厂家无锡金红鹰带大家了解一下焊接机器人编程的三种方法。
2023-07-13 16:46:143928 
器”是什么? 示教器全称叫做“示教编程器”,是一种应用于机器人控制的手持式装置。在机器人的运动控制系统中,示教器通过通讯电缆连接控制柜或者运动控制器,通过设置运动参数与编写机器人的运动路径,即可让机器人按照编写
2023-07-14 11:45:054791 
焊接机器人是现代制造业中广泛使用的自动化设备,它可以高效、精确地进行焊接工作,提高生产效率和焊接质量。然而,为了让机器人能够执行任务,需要进行示教操作,将所需的动作和路径录入机器人的控制系统。本文将
2023-08-02 17:56:532240 
示教器通常也叫示教编程器或示教盒,是进行机器人的手动操纵、程序编写、参数配置以及监控用的手持装置;是机器人控制系统的核心部件,是一个用来注册和存储机械运动或处理记忆的设备,该设备是由
2024-03-23 08:42:231996 ABB工业机器人的编程语言主要是RAPID(Robot Application Programming Interface for Development),它是一种高级编程语言,专门为工业机器人
2024-06-16 16:49:496866 当前机器人广泛应用于焊接、装配、搬运、喷漆及打磨等领域,任务的复杂程度不断增加,而用户对产品的质量、效率的追求越来越高。在这种形式下,机器人的编程方式、编程效率和质量显得越来越重要。降低编程的难度
2024-08-30 12:14:0111704 
机器人完成特定的任务。编程可以手动完成,也可以通过计算机辅助设计(CAD)软件自动生成。编程方式的选择取决于任务的复杂性、机器人的类型、以及所需的灵活性和效率。 1. 手动编程 1.1 示教编程 直接示教 :操作员直接控制机器人的
2024-09-04 09:26:173770 工业机器人示教器是一个关键的人机交互设备,通过它操作者可以操作工业机器人运动、完成示教编程、实现对系统的设定、故障诊断等。以下是工业机器人示教器上常见按钮的功能介绍: 一、紧急停止与安全相关按钮
2024-09-04 09:44:449992 。 一、什么是示教模式 焊接机器人示教模式是指通过手动操作机器人,使其按照预定的焊接路径进行移动,并记录该路径。该模式下,操作人员可以对焊接机器人进行编程,使其能够在自动模式下重复执行同样的焊接任务。示教模式
2024-09-09 17:55:351451 
随着拖动示教在协作机器人、并联机器人上的应用,将调试技术趋向快速、简便的方向发展,满足生产企业应用机器人进行及时、高效的生产需求,以及在工业4.0和“中国制造 2025”的背景下,适应现代工业快速
2024-10-23 15:52:162676 
协作机器人的拖动示教是一种简化机器人编程的方法,通过人类操作员直接引导机器人进行任务执行,而无需进行复杂的编程。下面是关于协作机器人拖动示教的详细解释。 拖动示教是一种直观且
2024-10-23 15:52:161472 松下机器人示教编程教学课件(新)
2025-06-11 17:23:330
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论