 海默机器人全新机器人编程系统EngSign 5.0重磅发布
海默机器人全新机器人编程系统EngSign 5.0重磅发布

导语 HARMO EngSig5.0是一款将示教器功能集成为一体的APP,是海默机器人的上位机控制软件(示教器)。Engsign取代了传统的笨重手持式机器人示教器,将示教器功能集成到一款轻巧的APP当中,只需在移动/PC端安装该APP,并与机器人处于同一局域网下,即可连接并控制机器人。
海默机器人全新的编程系统EngSig5.0,为用户提供了一种全新的无代码编程方式,让普通人也能轻松地学习和操作机器人。无需具备专业的编程知识和技能,用户只需通过简单的滑动示教,轻松实现机器人的编程控制和部署。该系统的特点在于高效和零编程基础,操作简洁、部署简易、支持跨平台,可在不同的操作系统上进行编程和控制;将用户的创意和想象变成现实。
同时,EngSig5.0支持多种第三方生态软硬件包括:焊缝跟踪、3D视觉、AGV、三维仿真、外部轴、夹爪等,让用户更有效地操作机器人,提高生产效率。
1
行业首创最简单、易用编程方式
HARMOEngSig5.0是海默机器人目前行业首创最简单、易用的编程方式,真正实现“零代码”编程。EngSign5.0采用了傻瓜式的操作方式,在使用前只需要安装好APP并设置好网络即可使用。 相对于传统手持式机器人示教器来说, EngSig5.0示教系统具有更便捷、更低成本、更稳定、更高效等优势特点。
EngSig5.0优势
EngSig5.0 advantage
1
跨平台
支持多平台
部署
2
无门槛
无需编程经验
轻松上手
3
零编程
无需具备专业的机器人编程知识
2
零学习成本、低投入高产出
EngSig5.0为用户提供了零学习成本的示教器,用户只需在PC端或移动端下载软件并安装即可使用。EngSig5.0与PC端采用Wi-Fi进行通讯,可实现多平台数据实时交互,也可通过PC端进行查看、编辑和下载,使用简单方便。
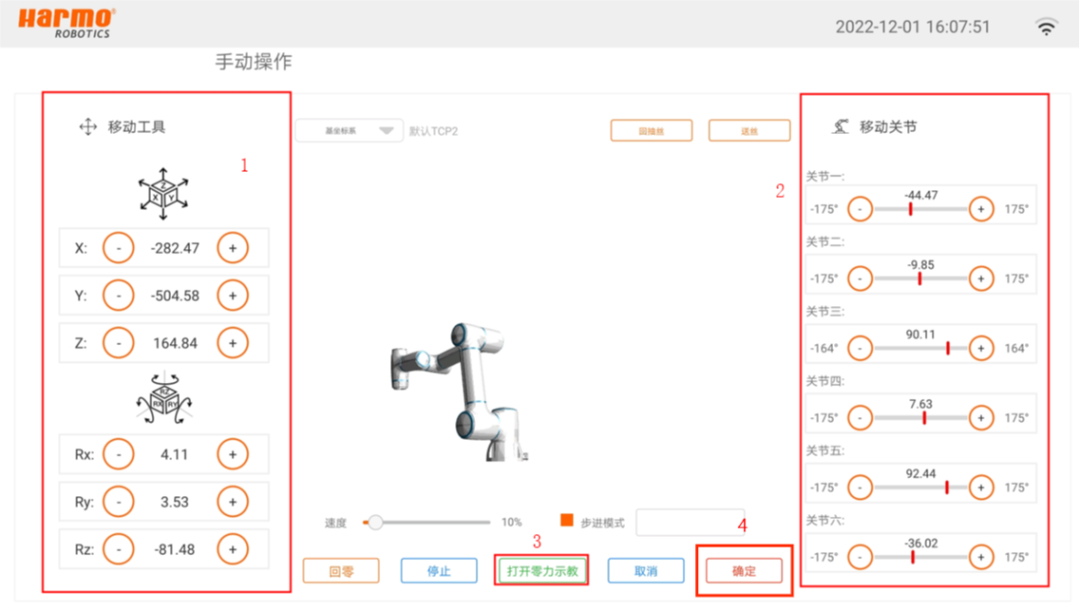
(EngSign5.0操作设置)
EngSig5.0采用模块化编程,通过对机器人程序模块的拆分,将复杂的程序变得简单易懂。
3
无代码,滑动、拖拽示教编程
轻松上手、让你的编程更简单
针对传统示教器需要用户在手持设备上进行代码化编程。EngSign5.0提供了一个强大的图形化编程环境,采用了图元化的设计思路,将机器人的动作和示教内容更直观、生动、可视化,无需编写任何代码或使用任何编程工具即可进行机器人参数配置与编程。
(图元滑动编程)
4
跨平台部署部署简易,跨平台支持
EngSign5.0支持Windows、Android、IOS、HarmonyOS等常用操作系统部署。
5
全新的图形可视化操作界面
界面更简洁、操作更随心
EngSign5.0版本最大的改变在于界面更加简洁可视化,没有复杂的窗口结构,界面更加清晰;用户可通过图形化界面来设计机器人执行任务的工作流程和编写工程。
APP内包含焊接、喷涂、搬运码垛等工艺包。

(可视化界面)
6
无编程,全功能使用场景更广泛
基于海默自主研发的焊接工艺包和码垛工艺包是 EngSign5.0的核心模块,为用户提供了丰富的机器人编程资源和功能。
基于海默自主研发的焊接工艺,包含了对焊缝跟踪仪的支持、焊接路径规划、焊接参数设定等功能。
焊接工艺设置
左右滑动查看更多
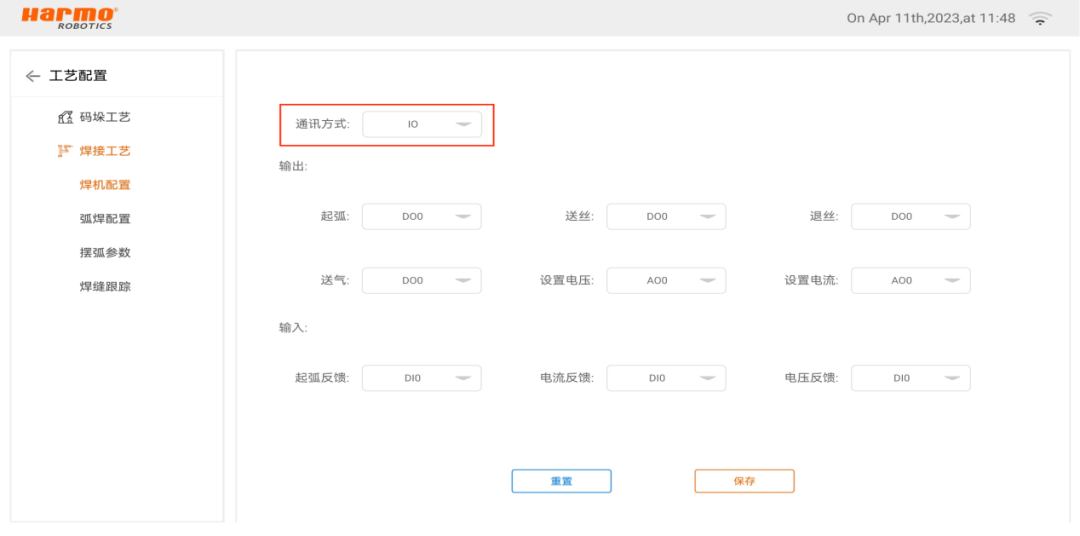


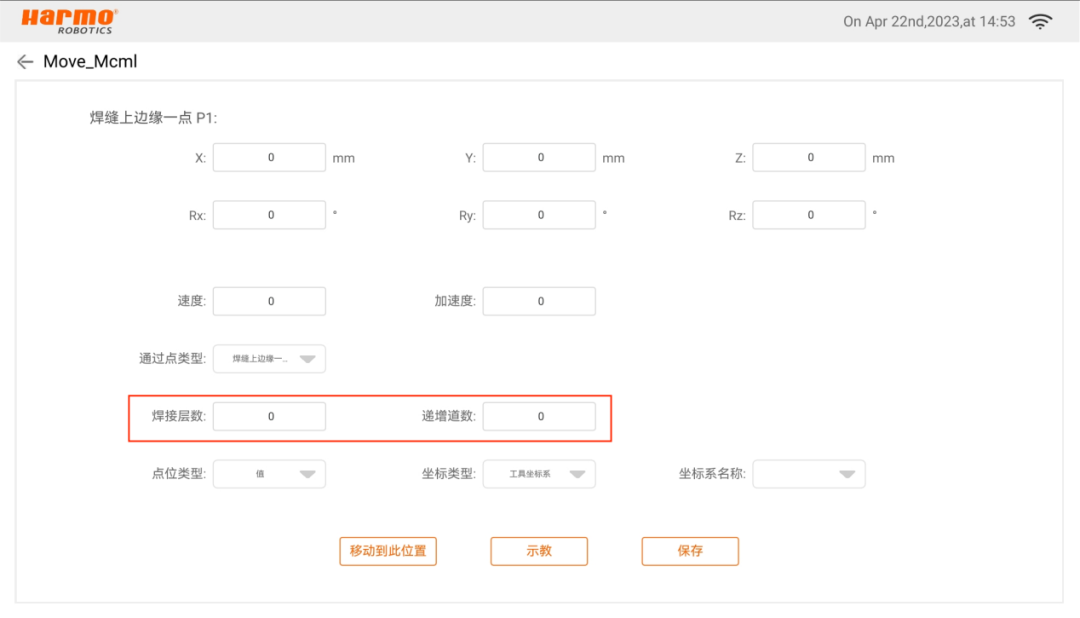
(焊接工艺设置)
(海默智能焊接机器人-焊接演示)
EngSign5.0中支持各种垛形码垛工艺应用;包括垛形快速建立与修改、垛形任意部署、动态垛形实时呈现等。使用机器人进行码垛时,可根据不同的码垛任务设定不同的机器人运动路径及运动参数。
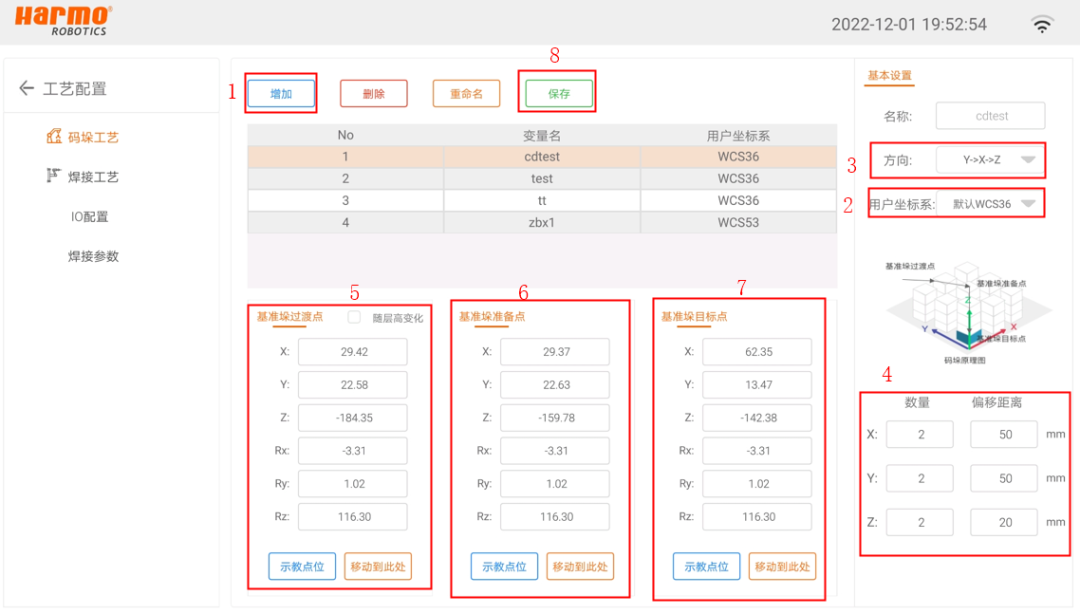
(码垛工艺设置)
海默将持续深耕自动化装备领域,秉持打造“您身边的机器人同事!”的企业理念,以协作机器人本体为核心,目前已完成HM06、HM06L、HM12、HM16 全系列协作机器人产品线部署,最高负载可达16kg,最大臂长1508mm;凭借安全稳定、简易编程等特点,广泛应用于电力、军工、3C、汽车、五金家电、厨卫洁具、医疗健康、科研教育、餐饮、新零售、物流等行业领域,为用户提供协作机器人一站式整体解决方案。
-
机器人
+关注
关注
213文章
31470浏览量
223698 -
编程系统
+关注
关注
0文章
7浏览量
6359
发布评论请先 登录
Neway电机方案在机器人技术方面的优势
探索RISC-V在机器人领域的潜力
具身智能大算力开发平台S600重磅亮相,地瓜机器人引领端云一体机器人进化新范式

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
最新发布!泰科机器人发布首款自研双足人形机器人

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
海默智能喷涂机器人——为工业喷涂解锁新技能




评论