 哈佛研究人员研发气动软机器人助力太空探索
哈佛研究人员研发气动软机器人助力太空探索

软机器人保证其更自然,更温和的自动化方法,但它们经常受到复杂性,成本和电线需求的影响。
值得庆幸的是,哈佛大学的研究人员找到了一种简化问题的方法。他们开发了一种由加压空气驱动的softrobot,不需要经常引导这些机器的多个控制系统。单独的输入通过不同尺寸的管子将空气泵送到机器人的腿部,这决定了这些腿的行为方式。如果您希望机器人向前爬行,您只需通过正确的管道发送空气。
测试机器人只是一个简单的十字形四足动物,它目前需要一个外部空气源。
你可能不会马上就可以在户外看见这种机器人。然而,精简的部件可以使其适用于软机器人各种复杂任务,例如太空探索或搜索和救援。他们可以在没有像更脆弱的传统机器人那样谨慎的情况下跨越崎岖地形,并且可以更加实惠 , 如果出现任何问题,可以便宜更换零件和修理,这一点非常重要。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
30637浏览量
219800 -
哈佛大学
+关注
关注
0文章
10浏览量
5235
原文标题:科学家发明出更简单的气动软机器人可助人类进行太空探索
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
探索RISC-V在机器人领域的潜力
探索RISC-V在机器人领域的潜力
测评人:洄溯
测评时间: 2025年11月
测评对象: MUSE Pi Pro开发板(基于进迭时空K1系列高性能RISC-V CPU)
一、 开篇引言
发表于 12-03 14:40
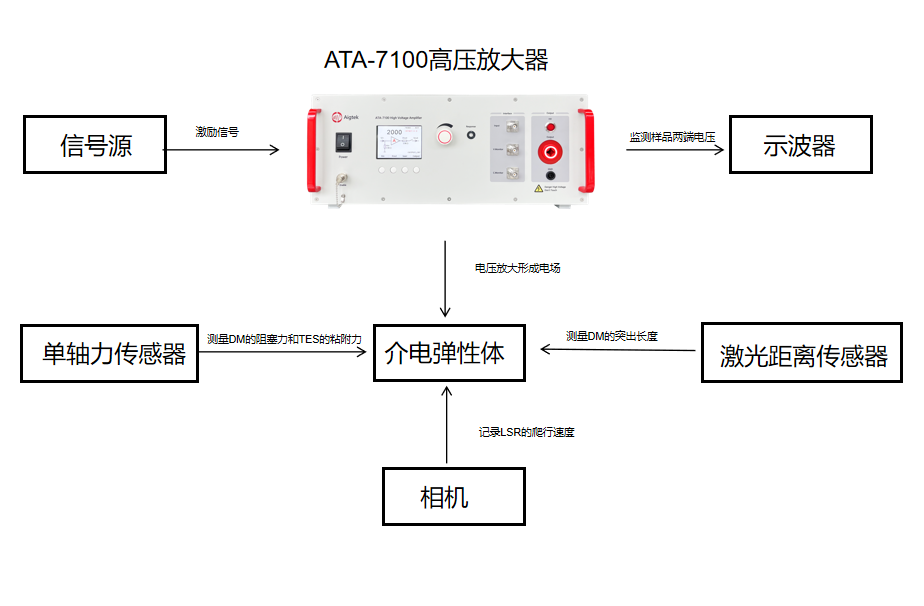
高压放大器在介电弹性体制成的软机器人研究中的应用
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳定性。在此,首次提出了一种受水蛭启发的摩擦电
如何在NVIDIA Isaac Lab中使用Newton训练四足机器人
物理在机器人仿真中发挥着至关重要的作用,它为机器人在真实环境中的行为及交互提供了精准的虚拟呈现基础。借助仿真器,研究人员和工程师能够以安全、高效且经济的方式训练、开发、测试和验证机器人

ABB机器人业务出售给软银集团
10月8日,ABB宣布,已签署协议将其机器人业务单元出售给软银集团,企业估值53.75亿美元,不再推进此前拟定的机器人业务独立上市计划。该交易尚需获得监管机构批准并满足惯例成交条件,预计将于2026年中后期完成。
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
故障率从 15% 降至 3% 以下。随着磁隧道结 (MTJ) 等新型技术成熟,下一代磁传感器有望实现纳米级精度、皮秒级响应速度,或使机器人 “高速竞速” 最高速度提升 40%;柔性磁传感器研发也将让
发表于 08-26 10:02
介电弹性体软机器人研究:高压放大器的应用实践
实验名称:介电弹性体肌肉制成的受水蛭启发的软机器人研究 研究方向:水蛭运动的特点是吸盘附着和身体收缩交替,在复杂地形上提供了高度的适应性和稳定性。在此,首次提出了一种受水蛭启发的摩擦电

工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,
发表于 06-11 14:30
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
软通天枢发布软通天汇复合机器人系列产品
近日,软通天枢联合生态伙伴推出软通天汇巡检复合机器人、勘测复合机器人、测量放线复合机器人和天汇Phyxis平台,旨在聚焦重点行业场景,加速复
石头G30 Space探索版:扫地机器人新纪元
在万众瞩目的CES 2025国际消费电子展上,石头科技携其最新力作——G30 Space探索版惊艳登场,为家用扫地机器人领域带来了一场革命性的变革。这款创新产品首次将太空探索机械臂技术
苹果研发ELEGNT框架,推动家用机器人动作自然化
ELEGNT框架的有效性,研究团队设计了一款类似皮克斯动画《Luxo Jr.》中台灯形象的机器人原型。这款机器人配备了6轴机械臂,并拥有一个带有灯光和投影功能的头部,设计独特且充满科技感。 通过运用ELEGNT框架,
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
近年来,人工智能领域的大模型技术在多个方向上取得了突破性的进展,特别是在机器人控制领域展现出了巨大的潜力。在“具身智能机器人大模型”部分,作者研究并探讨了大模型如何提升机器人的能力,大
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
现状和前沿研究,详细介绍大模型的构建方法、训练数据、模型架构和优化技术。
第4部分(第10章到第13章)深入探讨提升机器人计算实时性、算法安全性、系统可靠性及具身智能数据挑战的具身智能机器人系统
发表于 12-28 21:12
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17





 工商网监
工商网监
评论