 如何在NVIDIA Isaac Lab中使用Newton训练四足机器人
如何在NVIDIA Isaac Lab中使用Newton训练四足机器人

物理在机器人仿真中发挥着至关重要的作用,它为机器人在真实环境中的行为及交互提供了精准的虚拟呈现基础。借助仿真器,研究人员和工程师能够以安全、高效且经济的方式训练、开发、测试和验证机器人控制算法及原型设计。
然而,仿真往往难以完全复刻现实,这一问题被称为“仿真与现实的差距”(sim-to-real gap)。机器人开发者需要一个统一、可扩展且可定制的解决方案来对现实世界的物理现象进行建模,其中包括对不同类型求解器的支持。
本文将介绍如何在 NVIDIA Isaac Lab 中使用 Newton 训练四足机器人,实现从一个点移动到另一个点,以及如何搭建包含工业机械臂的多物理场仿真环境,完成衣物折叠任务。
关于 Newton:Newton 是一款开源、可扩展的物理引擎,由 NVIDIA、Google DeepMind 和 Disney Research 共同开发,由 Linux Foundation 管理,旨在推动机器人学习与开发领域的发展。Newton 基于 NVIDIA Warp 和 OpenUSD 构建,能让机器人以更高的精度、速度和可扩展性学习处理复杂任务。它与 MuJoCo Playground、Isaac Lab 等机器人学习框架兼容。Newton 求解器 API 为 MuJoCo Warp 等不同物理引擎提供了接口,使其能在基于张量的数据模型上运行,从而轻松与 Isaac Lab 中的训练环境集成。
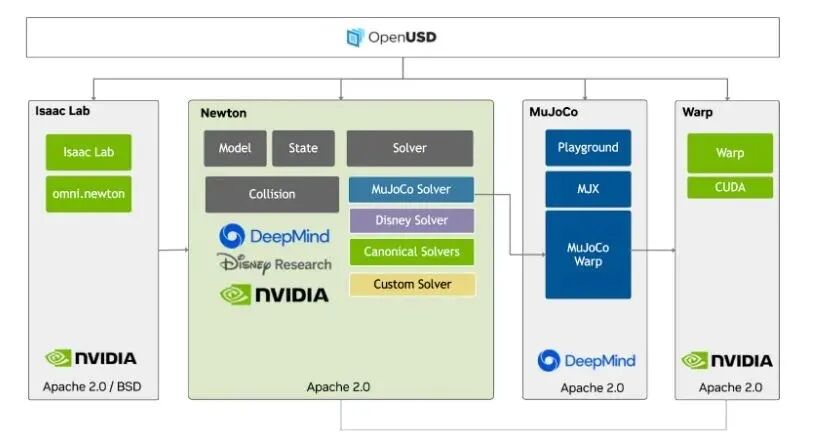
包含 Isaac Lab、Newton、MuJoCo 和 Warp 标注部分的架构图。Newton 是一个独立的 Python 包,提供 GPU 加速接口,用于描述机器人系统的物理模型和状态
在 NVIDIA Isaac Lab 中使用 Newton 训练四足机器人的运动策略:Isaac Lab 中全新集成了 Newton 物理引擎,为机器人研究与开发打造了更快速、更稳健的工作流。Newton 为机器人从仿真走向现实,实现实际应用价值提供了有力支持。
借助 Newton 独立引擎实现多物理场仿真:多物理场仿真能在单一框架中捕捉刚体(如机器人手部)与可变形物体(如布料)之间的耦合交互。这使得机器人设计、控制和任务性能的评估更贴近现实,同时支持基于数据的优化。Newton 可与 Isaac Lab 配合使用,但开发者也可在独立模式下通过 Python 直接调用它,以实验复杂的物理系统。
生态系统对 Newton 的应用:Newton 开源生态系统正快速发展,众多顶尖高校和企业正集成专用求解器与工作流,比如苏黎世联邦理工学院机器人系统实验室、光轮智能、北京大学、Style3D、慕尼黑工业大学等。从触觉感知到布料仿真,从灵巧操作到复杂地形运动,这些合作案例充分表明,Newton 为推动机器人学习发展,缩小“仿真与现实的差距”提供了通用基础。
-
机器人
+关注
关注
214文章
31582浏览量
224157 -
NVIDIA
+关注
关注
14文章
5714浏览量
110194 -
仿真
+关注
关注
55文章
4557浏览量
138770
原文标题:借助 NVIDIA Isaac Lab 和 Newton 训练四足机器人运动策略并对布料操作进行仿真
文章出处:【微信号:NVIDIA-Enterprise,微信公众号:NVIDIA英伟达企业解决方案】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于NVIDIA Isaac库开发的机器人调酒师ADAM亮相国际赛场
NVIDIA Isaac Lab推动机器人技术突破
NVIDIA 发布三大利器,推动人形机器人迈向新纪元
NVIDIA 利用全新开源模型与仿真库加速机器人研发进程

NVIDIA Isaac Lab多GPU多节点训练指南

利用NVIDIA Cosmos模型训练通用机器人

NVIDIA Jetson + Isaac SDK 人形机器人方案全面解析
NVIDIA Jetson + Isaac SDK 在人形机器人领域的方案详解
NVIDIA助力构建人形机器人全身遥操作仿真平台
NVIDIA Isaac Lab可用环境与强化学习脚本使用指南

通过NVIDIA Cosmos模型增强机器人学习

NVIDIA Isaac Sim和Isaac Lab现已推出早期开发者预览版
NVIDIA Isaac Sim 4.5.0与lsaac Lab 2.0的安装教程

NVIDIA Isaac Sim与NVIDIA Isaac Lab的更新
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI




评论