 波士顿动力Atlas机器人会过独木桥了
波士顿动力Atlas机器人会过独木桥了

过独木桥,踩乱砖块,走猫步,这是波士顿动力的 Atlas 机器人最新学会的能力!在美国人类与机器认知研究所(IHMC)新算法的支持下,Atlas完成了“最难行走实验”,成功走过了乱石块、独木桥式的狭窄通道等复杂地形。
波士顿动力的Atlas机器人会过独木桥了!
近日,IHMC Robotics发布了一段相当震撼的新视频,视频中,波士顿动力的Atlas机器人(DRC版本)在小心翼翼地、自主地走过各种物体,包括悬空的木板和摇晃的砖块。
在摇晃的砖块上走
走独木桥也不在话下
砖块看起来摇摇晃晃,木板桥的宽度比它自己的脚看起来宽不了多少,Atlas要走模特儿一般的“猫步”,难度还是不小的。
在视频描述中,IHMC称,Atlas机器人已经能够通过自主规划在狭窄的地形上行走。
Atlas机器人由波士顿动力公司制造,但IHMC Robotics编写了控制、感知和规划算法,使机器人具备了视频中展示的灵活性。
DRC(DARPA机器人挑战赛)版的Atlas机器人使用系绳作为外部驱动,理由是:大型机器人容易大量耗电,而且系绳也有安全带的作用,可以防止机器人在测试时摔到地面。DRC参赛机器人都在其内部安装有很重的电池包,这对于保持行走平衡来说是一大不利因素。
Atlas机器人高约1.83米,重约149~181千克,全身有多达28个液压关节,其原型是PETMAN机器人。
砖块的宽度与机器人脚板宽度差不多
IHMC称,机器人利用激光雷达感知地形,并绘制平面区域的地图。路径规划算法将平面区域中机器人的足迹规划到由操作员制定的目标位置。
目前,机器人在这种地形上走路的成功率约为50%。
IHMC的研究人员计划通过使用角动量增加平衡,并更好地考虑关节的运动范围来提高成功率。
“交叉步”使机器人结构不太稳定
机器人在狭窄的地形上行走是很困难的,因为有时候要走“交叉步”,由于机器人髋关节的运动范围有限,并且当一只脚跨到另一只脚的正前方时会造成一个小的多边形支撑,导致结构不稳定。
重新编程软件,教Atlas像人类一样直腿走路
IHMC全称佛罗里达人类与机器认知研究所,是佛罗里达州立大学系统的非营利性研究机构。IHMC的研究领域包括:人形机器人、双足机器人控制技术、生物启发的腿式机器人、人机系统设计、可穿戴式外骨骼设备等。
2015年,IHMC Robotics在DARPA机器人挑战赛(DRC)获得第二名的好成绩,抱回100万美元奖金,使用的是波士顿动力公司提供的Atlas硬件。
之后,IHMC继续对Atlas机器人进行编程升级,希望教它“像人类一样走路”,获得灵活性和控制能力。
机器人使用吸尘器有模有样
灵活性例如——做家务。他们公开的视频展示了机器人扫地、使用吸尘器清洁地板、搬动、整理仓库中的工具,将瓶瓶罐罐放进垃圾桶等。
不过,视频是以20倍速播放的,实际的话Atlas的运行速度要慢得多,要在每一步停下来,思考和等待命令,然后执行每个任务的程序。
让机器人直腿走路
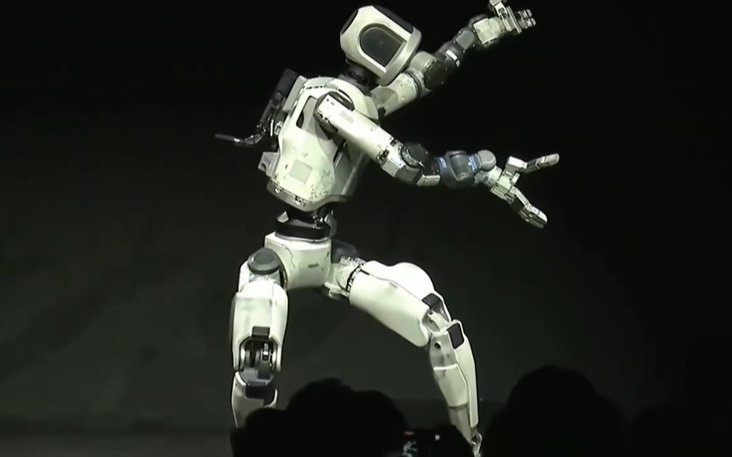
人形机器人有着非常独特的走路方式。他们的膝盖弯曲,躯干尽可能保持不动,波士顿动力的Atlas机器人也采用这种蹲伏式的走路方式,因为腿保持弯曲状态可以防止跌倒。
让我们看一下Atlas是怎样走的:
这种步态在人形机器人中非常常见,甚至已经成为机器人的“正常”步态。
但人类不是这样走路的。我们走路时腿会有直着的时候,每一步都锁住膝盖,因为这样可以更好地支撑我们的重量。你可以自己试一试,学机器人那样一直弯曲着双腿走路会很累。
IHMC的机器人专家们试图通过教Altas像人类一样走路来解决这个问题。除了提高类人机器人的效率外,更自然的步态还能让它们变得更加灵活,能够应对更多崎岖的地形。
让机器人走路更像人
为此,IHMC开发了一种新的全身控制框架,驱动控制器使机器人的腿伸直,而不需要腿对地面施加更多的力。
从背后看,可以明显看到机器人膝盖有弯曲和直立的动作,步态更像人类
在实际的测试中,Atlas能够在各种地形上行走,甚至能够在腿挺直的情况下对轻度的攻击做出反应。
-
机器人
+关注
关注
213文章
31444浏览量
223659
原文标题:一转眼,波士顿动力 Atlas 机器人又会过独木桥了!
文章出处:【微信号:smartman163,微信公众号:网易智能】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
CES 2026机器人争霸:中国军团携全栈技术突围,波士顿动力Atlas遇劲敌
今日看点|黄仁勋:物理AI的ChatGPT时刻已然到来;波士顿动力发布Atlas人形机器人量产版本
工业机器人TOP1,切入人形机器人赛道,意欲何为?

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
Meta重磅入局人形机器人,目标打造“机器人界的安卓系统”
亿纬锂能亮相2025世界机器人博览会
全国首届人形机器人线缆技术研讨会圆满召开!
工业机器人的特点
对话:人形机器人连接器与线缆有何攻关点?

轮式移动机器人电机驱动系统的研究与开发
明远智睿SSD2351开发板:语音机器人领域的变革力量
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI




评论