 自动驾驶测试内容及封闭测试分析
自动驾驶测试内容及封闭测试分析

本文为百人会《全球自动驾驶测试与商业化应用报告(2019)》内容。
自动驾驶汽车的测试承担着智能化、网联化等技术以及在云、管、端多方面的技术研究和产品开发,对技术迭代、功能安全性的验证、应用示范,以及未来产品标准、法规、监管等方面的探索具有重要意义。
一是自动驾驶汽车的最终产品形态尚未清晰,但技术进步和迭代升级的需求迫切。测试是当前发展阶段的重中之重,能够帮助企业积累场景数据,有助于对系统功能进行量化分析,为技术的发展指明方向,是未来自动驾驶产品实现应用不可或缺的条件。
二是汽车的电动化、智能化、网联化、共享化和绿色化正在进行中,自动驾驶汽车将成为五化融合后的汽车产品的最终形态,自动驾驶测试为探索五化条件下的新商业模式提供了有效的载体,而商业示范类的测试项目可以为商业模式创新指明方向。
三是自动驾驶汽车尚未形成稳定的产品形态,产品标准无从谈起,测试可以为未来的产品标准建设提供有利的数据支撑,能够为未来稳定型态的自动驾驶汽车提供产品标准、测试标准以及认证体系等一系列支撑产业化发展的基础,为中国在国际标准、国家标准方面的建设提供有利支持,甚至能够帮助中国重塑全球汽车产业格局的地位。
四是自动驾驶汽车或者具有自动驾驶功能的交通工具未来将实现上路行驶,立法和执法部门需要一定的时间去了解和吸纳,以建设有效的监管机制,测试则可为其提供数据和经验积累,产品的演变将带来监管方式的变化,为未来稳定时期的监管体系建设提供重要的参考教材,帮助立法和执法部门提前并充分地了解这个产品,进而在立法和监管措施制定时,全面考虑产品的定位和价值。
自动驾驶测试内容及封闭测试分析
一、自动驾驶测试的内容
与传统汽车测试的方式不同,自动驾驶汽车的性能表征存在不确定性,且非单调,是人、车、道路交通环境相互耦合的结果,传统的单一工况重复测试并不适用,需要穷尽所有的测试场景。自动驾驶汽车的验证将重点考核车辆对交通环境的感知及应对能力,同时V2X 通信技术的引入也增加了网联化方面的测试需求。根据自动驾驶汽车的应用特性及技术要素,自动驾驶汽车的测试内容主要涉及以下方面:
1、基本的功能与性能。一方面是自动驾驶功能的完备性,主要包括启动、停止、转弯等基本的驾驶功能,以及在各种常见道路场景中的通过方式,对障碍物的识别及响应能力、发生故障或无法安全运行时能够提示驾驶员接管或自动进入最小风险状态的功能等,这也是各个地区评判自动驾驶道路测试资格的基础要素;另一方面,重点测试车辆的性能,即车辆的响应时间、运行效率、资源利用情况等指标,比如对障碍物的识别时间、采取刹车行为的反应时间、通过十字路口的效率、停车入位的时间、转弯时的路线选择、跟车距离等,是对比评价自动驾驶汽车与人类驾驶能力的关键方式。目前中国依据常见的交通场景已经出台了针对自动驾驶汽车相关测试评价规程。
2、预期功能安全性。有别于传统汽车,自动驾驶汽车应重点关注预期功能安全的测试。在系统及相关零部件部件不存在故障的情况下,自动驾驶汽车在复杂的交通场景中,有可能导致系统做出错误判断从而执行不符合预期的行为,产生安全风险。比如雨、雪等极端天气对感知系统造成干扰,从而影响自动驾驶系统的决策过程。
自动驾驶汽车预期功能安全的测试是一个长期、庞大的工程,美国智库兰德公司2016 年的一份报告认为:一辆自动驾驶汽车需要积累110 亿英里的测试数据才能验证其安全性。天气、温度、地形、信号强弱等因素均会对自动驾驶汽车带来未知的影响,理论上需要穷尽所有场景的测试才能真正保证预期功能的安全性,而为了提高效率,往往会引入模拟测试的方式。2017 年5 月,M-City 发布白皮书《公开自动驾驶快速测试方法论》,文中有研究员表示按照他们的模拟测试程序能够将测试时间减少300-10 万倍,其方法论的关键思想是增加事故频率高的场景进行数据提取与分析,进而评估自动驾驶汽车的安全性能。
3、信息网络安全。当汽车处于联网状态时,会无时无刻面临潜在网络风险,2016 年9 月,腾讯科恩实验室宣布他们以“远程无物理接触”的方式成功入侵了特斯拉汽车。多项试验性“攻击”的案例表明,自动驾驶汽车将要面对数据丢失、数据泄露、系统被侵入等问题,信息安全、网络安全已经成为其发展的重要挑战,需要加强相关测试。
自动驾驶汽车的网络结构主要由车内网、车云网和车际网构成,因此,在测试网络安全防护能力时,不仅要对自动驾驶汽车本身的安全性进行测试,还要重点关注其与外界通信时的网络安全风险,比如自身数据的保密性如何、能否鉴别外界信息的完整性与真实性,以及当被网络攻击后的及时响应与处理能力等。
4、决策能力与安全意识。决策能力与安全意识相当于自动驾驶汽车的“大脑”,从技术水平来看,自动驾驶汽车的决策能力还存在不足,安全意识还比较薄弱,这两点正是自动驾驶技术发展的痛点。决策能力决定了自动驾驶汽车是否能真正实现智能化,而安全意识则是人类是否能够相信自动驾驶技术可靠性的绝对基础。
基于决策能力与安全意识的测试往往需要通过人工智能算法对大量数据进行训练,收集真实驾驶场景的数据并进行物体类别标注或驾驶决策,建立用于训练驾驶模型的数据库。对于数据库的建立和后期的更新,需要结合真实场景测试与虚拟测试的方式。
5、车路协同与通信技术。在车路协同的技术路线下,未来自动驾驶汽车将与城市交通平台、道路基础设施等智能化终端进行互联,需要具有高带宽、低延时、高可靠特性的通信网络支撑。从整个智能交通系统的角度来看,基于通信技术能力的测试也十分重要,一方面尝试不同技术路线的应用,如5G、DSRC 等,为车-车及车-路协同通信提供保障;另一方面,重点关注联网协同感知、控制的能力,自动驾驶汽车如何与智能交通平台实现互联互通,哪些数据能够为自动驾驶汽车带来驾驶决策依据,智能交通平台又将如何通过大数据计算实现对交通管控的最优调配。
二、自动驾驶封闭测试分析
当下,自动驾驶汽车技术尚未成熟,基于封闭场地模拟构建各种实际道路场景对自动驾驶汽车进行试验验证,是提升其技术水平、功能稳定性、安全性的重要途径。一方面,封闭测试可以为自动驾驶汽车提供接近真实交通场景的试验环境,相关企业可以在风险可控的条件下发现自动驾驶汽车存在的技术问题,确定车辆实际可靠运行的道路环境条件;另一方面,封闭测试可以帮助测试主体复现在道路测试中遭遇的偶然场景,满足定制化需求,更有针对性地提供测试场景,加快技术试验验证的效率,专业化的封闭测试场可以提供多种道路突发状况集中发生的测试场景,对于测试主体来讲,这仅有的几公里的测试效率相当于真实道路中上百甚至上千公里的测试经历。此外,封闭测试还能帮助测试人员熟悉自动驾驶汽车的操作习惯、测试方式,并充分了解紧急情况下的应对方法,以提升公共道路测试的安全性、可控性。
(一)国内外自动驾驶测试场建设情况
在自动驾驶测试评价体系中,依托封闭测试开展自动驾驶功能、安全性的验证愈发重要,模拟尽可能多的交通场景,不断积累测试数据,将为自动驾驶汽车技术迭代提供有力支撑。能够满足封闭测试需求的自动驾驶测试场也将扮演重要角色,目前全球范围内正加速布局测试场的建设。
全球主要自动驾驶汽车测试场分布
美国:自2015 年美国密歇根州立大学建立了自动驾驶汽车测试场“交通转换中心”(M-City),并于当年7 月投入使用以来,自动驾驶测试场项目在美国得到了广泛的关注。美国从联邦政府层面准许自动驾驶汽车造商可以申请开展道路测试,《自动驾驶汽车政策指南》中指出,申请道路测试前需要完成包括从系统功能、适用范围、目标响应、系统安全等多方面的评估,这也带来自动驾驶封闭场地测试的需求,美国各州根据产业发展需求展开了自动驾驶测试场的建设热潮。
2016 年11 月,美国交通部公布“自动驾驶试验场试点计划”,并于2017 年1 月确立了10 家自动驾驶试点试验场地(M-City 不在其中)。这10 个自动驾驶试点试验场分布于9 个州,分别位于美国的东北部、东部、东南部、北部、中西部、南部、西部、西南部,各个试验场具有差异化的气候条件和地貌特征,比如位于密歇根州的美国移动中心(ACM)能够提供冰雪天气的测试环境,位于加州的GoMentum Station 具有丰富的丘陵、斜坡等地貌场景,能够使自动驾驶汽车可以在更加丰富的条件下开展测试。
英国:在自动驾驶汽车测试与示范方面,英国政府计划投资1 亿英镑用以推动相关工作,目标是在沿伯明翰和伦敦之间(包括考文垂、伯明翰、米尔顿凯恩斯、牛津和伦敦等地区)的M40 走廊建设网联与自动驾驶汽车先进技术集群,同时将基于英国现有的部分网联与自动驾驶汽车测试中心,在英国汽车产业核心区域集中建设测试设施集群,为自动驾驶汽车构建多种测试环境。
Mira City Circuit 测试场由英国汽车测试服务商Mira 公司修建,该测试场占地4560 亩,内部共有24 个环路,全长超过95km,测试场分为9 个区域,可分别用于传统车辆测试以及智能交通和网联车辆的测试。Mira 测试场提供了模拟信号遮蔽和各类V2X 通信设施,能够帮助自动驾驶汽车进行网络方面的测试和动态捕捉系统的完善。
日本:2016 年2 月,日本经济产业省制造产业局汽车课正式公布“无人驾驶评价据点整备项目”并征集承接单位,最终该项目落户日本汽车研究所(JARI),并于2016 年开始建设。
整备项目对日本国内外企业、科研院校实行资金补助,资助其进行相应的无人驾驶安全测试模拟设施建造,以积极参与国际相关自动驾驶规则与标准制定,加速具有节能效果的自动驾驶技术研发,降低交通运输过程中二氧化碳排放量。

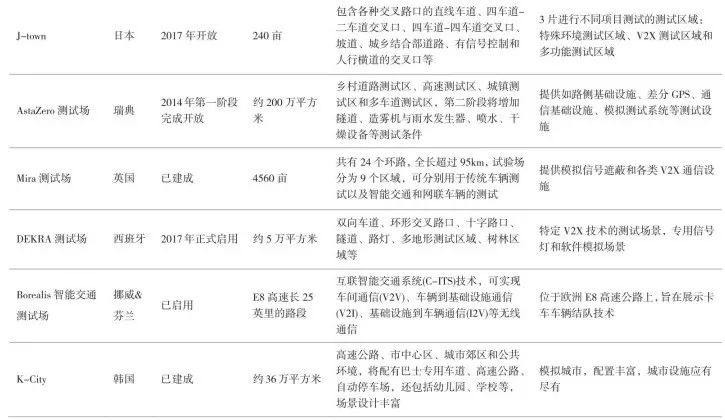
日本J-town 自动驾驶汽车测试场
随着整备项目的推动,自动驾驶汽车测试场J-town 于2017 年4 月面向日本国内企业和研究机构开放测试。该测试场占地约240 亩,具有特殊环境测试区域、V2X 测试区域和多功能测试区域3 片测试区域,能够提供包含各种交叉路口的直线车道、四车道-二车道交叉口、四车道-四车道交叉口、坡道、城乡结合部道路、有信号控制和人行横道的交叉口、可设置隔离栏及标志标线的多功能测试街区、车流汇合道路等多种测试场景。
韩国:2016 年8 月,韩国政府宣布,将开放一个约36 万平方米的场地(K-City)供自动驾驶车辆进行性能测试。2018 年12 月,韩国交通部表示K-City 已建成,是一座无人居住的城市,将用于基于5G 移动网络的自动驾驶汽车测试。K-City有五个主要的路测环境——高速公路、市区道路、郊区街道、停车场和公共设施,将配备40 个建筑立面、十字路口、一个交通圈、一座桥梁、一条隧道、碎石路,以及大量的场景及障碍,还包括约8 公里长的道路,有交叉路口、交通标志和信号灯、人行道、长椅、模拟建筑、街灯以及建筑等交通场景元素。
瑞典:AstaZero 是位于瑞典哥德堡附近的大型测试区域,占地约200 万平方米,依赖于传统汽车试验场的改造升级,为自动驾驶汽车提供完整的测试环境与条件。AstaZero 主要研究如何通过主动安全技术来避免事故,其采用政府和社会合作模式,由政府、行业学会及企业共同出资7000 万美金建设,由瑞典SP 技术研究院和查尔姆斯理工大学共同所有,汽车厂商沃尔沃是AstaZero 的主要投资和使用方。
2014 年8 月,AstaZero 一期完成建设并投入使用,二期建设工作已经进入筹备阶段,将在一期的基础上进一步丰富、完善基础设施和测试场景。AstaZero 包含乡村道路测试区、高速测试区、城镇测试区和多车道测试区,可针对不同场景灵活设置,进行系统化测试,第二阶段将增加隧道、造雾机与雨水发生器、喷水、干燥设备等测试条件。
中国:随着工信部构建的“基于宽带移动互联网的智能汽车与智慧交通应用示范”项目的推动,中国积极推进智能网联汽车测试示范区的建设,已经构建形成了包括北京-河北、上海、重庆、浙江、吉林(长春)、湖北(武汉)、江苏(无锡)在内的“5+2”车联网示范区,提供包括车路协同、先进辅助驾驶、自动驾驶、交通大数据等新技术与新产品实验验证、测试评估、封闭测试、应用示范等多方面的自动驾驶汽车政策、法规现状与展望的智慧交通测试示范条件。
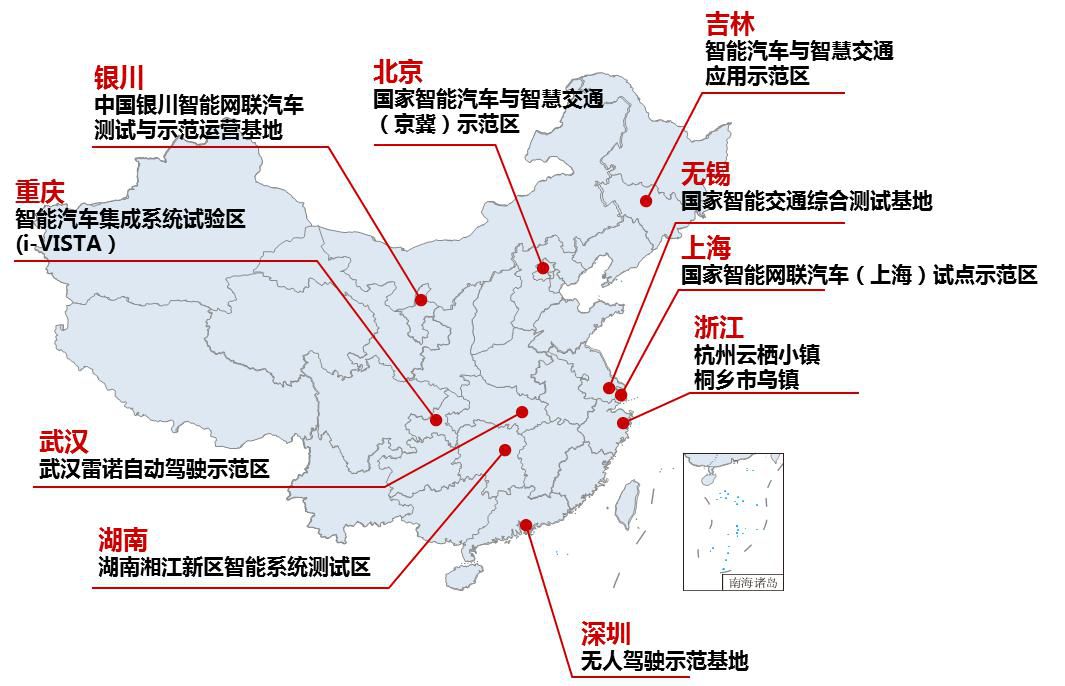
中国正加快自动驾驶测试示范区建设
目前,上海、重庆、北京等城市的智能网联汽车测试示范区及封闭测试场地已完成开园并投入使用。与此同时,长沙、常州、厦门等地区也在结合产业发展状况,依托地区优势、特色资源,积极探索自动驾驶汽车的测试与示范,为自动驾驶汽车的快速发展提供环境上的支持。
全球主要自动驾驶汽车测试场建设情况


(二)运营模式以跨部门、领域合作为主
自动驾驶测试场建设耗资巨大,以国家智能汽车与智慧交通(京冀)示范区亦庄基地为例,不考虑土地成本以及人员的成本,仅是包括路网的建设、测试场景的搭建、测试设备的安装等基础建设方面的投入大约为3 亿元。因此,测试场需要多方支持,展开多方面合作,目前来看,国内外主要测试场大多采用政府、企业、研究机构等紧密结合、跨产业协同发展的模式,由政府部门联合相关具有一定技术实力的合作伙伴共同建设。
一是充分发挥政府自身职能,为测试场建设运营提供政策、资金、土地资源等多方面的支持,政府作为主导者,又肩负着自动驾驶测试顺利开展,产业健康、快速发展的重担,依据技术进展及产业态势继而设计适用不同时期的顶层规划。如GoMentum Station 允许政府部门获得正在研制的新技术的信息,使得政府部门有知情权,以便开发政策、法规和合理规划决策。日本汽车研究所测试基地规定,经济产业大臣可以随时要求受托机构报告项目进展情况以及收支情况,以确保政府可以随时对项目情况进行监管,项目结束之后,政府依旧对项目成果具有约束力。
二是凝聚来自不同领域企业的力量,掌握不同技术能力的企业将会提供在基础设施搭建、通信网络覆盖等多方面的支持,明确分工,高效推进测试场的建设与运营。
三是测试场将带来产业集聚,如M-City 的合作伙伴中,企业数量较多,且分布领域涉及整车制造、汽车零部件、汽车电子、信息通信、交通运输、保险等,有利于充分发挥产业集聚优势促进企业间跨领域的合作。
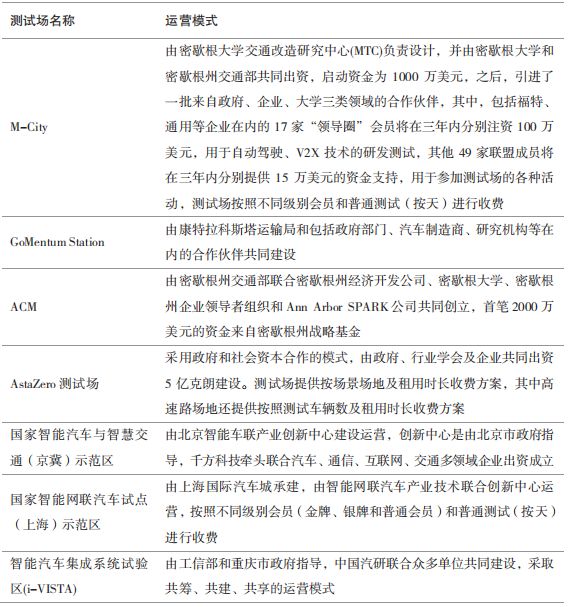
国内外部分测试场的运营模式
(三)自动驾驶测试场的关键组成部分
从国内外的建设情况来看,自动驾驶测试场往往会模拟搭建诸如单向车道、双向车道、十字路口、环形交叉路口、丁字路况、环岛、高速公路等常见的交通场景,除此之外,还应具备多种类型的道路环境、智能化的交通基础设施、辅助测试设备、V2X 通信网络以及具有丰富场景类型的场景数据库,为自动驾驶汽车测试提供完善的测试条件。
(1)多类型的道路环境。测试场应覆盖城市、郊区、乡村以及高速公路等典型道路场景,以满足自动驾驶汽车所要面临的复杂道路环境。标准车道标线的铺装路面及非铺装路面相组合,坡道、土路、泥路、砂石路以及结冰路面等道路类型以及桥梁、隧道、树木、电线杆、路灯、铁路等场景,能够帮助自动驾驶汽车应对复杂多样的交通场景特征。此外,天气因素对自动驾驶汽车的性能表现具有很大的影响,尤其是对预期功能安全带来很大的挑战,因此,引入天气模拟器,搭建雨、雪、雾等恶劣天气的测试场景,训练自动驾驶汽车在极端、复杂的环境下的感知、决策能力,这也将成为测试场的关键。
中国、美国等国家具有土地资源上的优势,不同地区的气候、地貌特征差异性较大,对封闭测试带来很好的天然条件。如中国重庆起伏路段较多,且多雾、多雨,长春秋冬季节较为寒冷,雨雪天气频繁,在全国分布建设测试场,能够帮助自动驾驶汽车在不同气候环境下进行测试,企业开展测试和部署工作时也更具针对性。
(2)智能化基础设施。如交通信号灯及限速、指示、禁令等道路交通标志牌,旨在验证自动驾驶汽车对交通信号的识别、判断及执行能力。测试场还应搭建诸如ETC 系统、RFID 系统、GPS 基站、北斗导航系统、交通控制系统、交通流模拟系统、通信系统、监控系统等智能化基础设施,构建智能交通测试环境,保障完整的测试能力,为自动驾驶封闭测试提供技术支持。
不过,为了降低建设成本,提升基础设施的利用率,一些测试场在提供一定基础设施支持的同时,还应为丰富的测试需求预留定制化的空间,继而会采纳柔性化设计。例如M-City 设定了一片开放测试区域,能够依据需求设置成不同的场景,比如停车场、特殊的交叉路口等。
(3)辅助测试设备。测试场应引入背景车、假人、自行车、摩托车等其他交通参与者以及模拟气球、模拟塑料袋等有可能出现在道路中的其他物体,以验证自动驾驶汽车对实际路况的适应能力。尤其是在中国,交通出行体系较为复杂,一、二线城市中出行高峰道路状况较为混杂,交通参与者众多,人车同行等情况屡现不鲜,测试场应针对中国特色的道路情况,加入诸如电动自行车、三轮车等交通参与者模型,进一步加强测试能力。
(4)用于V2X 的通信网络。自动驾驶汽车将同时具备智能化和网联化的技术,基于V2X 的网联化协同感知、协同控制将是未来实现全自动驾驶应用的必要条件,车路协同更是自动驾驶汽车发展的重要技术路线。对自动驾驶测试场而言,搭建LTE-V、DSRC 等主流通信设备,率先探索5G 在车联网方面的应用,实现全区域WiFi 及4G 网络覆盖,可以为企业提供不同技术路线、不同应用场景的测试环境,对探索车路协同技术发展提供基础性的保障。从信息安全的角度,测试场应加强网络安全防护措施,对测试信息进行加密,与此同时,对自动驾驶汽车尝试“网络攻击”,以验证车辆本身的安全性,以探索未来基于自动驾驶汽车的网络安全技术。
(5)场景数据库。交通场景数据是自动驾驶汽车研发与测试的基础数据资源,是评价其功能安全的关键参考,是定义自动驾驶汽车技术标准的重要依据。场景库能够通过软件以及仿真工具包对测试场景进行虚拟复现,其中元素包含各种道路路谱、交通标志、气象环境、事故场景、法律法规场景、驾驶人员及其他交通参与者的行为习惯等,将这些场景元素以及车辆驾驶行为进一步数字化,有利于进行数据提取并量化分析自动驾驶的安全性能及不足,测试过程产生的数据也能更好地支撑场景库的搭建。
(四)典型自动驾驶测试场案例
1. M-City。M-City 位于美国密歇根州安娜堡市的密歇根大学校园内,占地32 英亩(约12.9 万平方米),由密歇根大学交通改造研究中心(MTC)负责设计,是全球首个专门为测试自动驾驶车而打造的测试场。M-City 已于2015 年7 月建成开放。
在道路场景和基础设施方面,M-City 采用了模拟城镇建造的思路,充分考虑了现实并最大限度地还原现实场景,同时设置了不同材料的道路路面、不同形态的道路结构和不同样式的路侧基础设施。比如M-City 提供混凝土路面、沥青路面、砖面路、污垢路面等多种路面环境,能够帮助验证自动驾驶汽车在多种不同路面中行驶的能力及稳定性。再比如M-City 还提供人行横道线、车道标记、街道斜坡、自行车道、树木、消防栓、人行道、周围的建筑物以及在实际公路中会遇到的其他场景,旨在训练自动驾驶汽车在常见的真实场景中的性能表现。
另外,M-City 采用了大量的可移动、可替换、可升级的基础设施,道路无固定标线,可随时更改车道布置,如建筑外墙、假人等多种交通元素可以移动,标志牌、信号灯等交通标志可以随时进行更换。

M-City 自动驾驶测试场
在运营模式方面,M-City 采用了会员制度,最初的建设是由密歇根大学和密歇根州交通部共同出资,启动资金为1000 万美元。之后,引进了一批来自政府、企业、大学三类领域的合作伙伴,跨越多个产业领域,这些合作伙伴划分为“领导圈”会员和其他联盟成员两个级别,分别拥有不同的权利和义务。其中,包括福特、通用等企业在内的17 家“领导圈”会员将在三年内分别注资100 万美元,用于自动驾驶、V2X 技术的研发测试,其他49 家联盟成员将在三年内分别提供15 万美元的资金支持,用于参加测试场的各种活动。在收费方式上,M-City 按照不同级别会员和普通测试(按天)进行收费。
总体来看,M-City 柔性化设计理念为自动驾驶汽车测试场景构建带来了很高的灵活性和兼容性,能够满足多元化的自动驾驶测试需求,可灵活变更的场景设施还能够进一步强化测试,测试主体可定制化地集中设计突发状况的“发生”,提高测试效率。与此同时,“会员制”的模式能够帮助测试场凝聚来自不同领域企业的力量,比如通信企业可以为测试场提供基于V2V/V2I 车联网等技术的支持,交通运输领域的机构可以分享在交通控制及大数据管理等方面的经验,跨领域协同合作,以加快推进测试场的建设与技术迭代。不过,M-City 作为建设较早的测试场,最初设计的局限性也带来了一些不足,难以适应快速发展的自动驾驶汽车的测试需求,比如直线道路长度的不足,使得M-City 难以提供70km/h 以上速度的测试条件,受限于场地大小,M-City 只能构建一些相对简单的场景,测试场景的真实性和复杂性有待提高。
2.国家智能网联汽车试点(上海)示范区。国家智能网联汽车(上海)试点示范区(以下简称“上海示范区”)是由工信部2015 年6 月批准的国内首个国家级智能网联汽车示范区,由上海国际汽车城(集团)有限公司承担建设,2016 年6 月,上海示范区的封闭测试区(F-Zone)正式开园,建设面积为2 平方公里。
在测试场景和基础设施方面,该测试场模拟了高速、城市和乡村道路场景,其中可用于测试的道路长3.6 公里,建设了1 个GPS 差分基站、2 座LTE-V 通讯基站、16 套DSRC 和4 套LTE-V 路侧单元、6 个智能红绿灯和40 个各类摄像头,园区内道路实现了北斗系统的厘米级定位和WiFi 的全覆盖,具有隧道、林荫道、加油/充电站、地下停车场、十字路口、丁字路口、圆形环岛等模拟交通场景,可以提供50 种场景的测试验证。辅助测试设备方面,该测试场提供了可移动的假人、背景车辆、气球车、驾驶机器人、自行车等,帮助自动驾驶汽车验证如碰撞预警、紧急制动等驾驶辅助及自动驾驶功能。
国家智能网联汽车(上海)试点示范区封闭测试区
针对多元化测试场景的需求,上海示范区在场景库建设方面还提供了软件支持。上海示范区在2017 年6 月启动了“昆仑计划”——《中国智能驾驶全息场景库建设》项目,目标建设一个面向全行业的、加速智能网联汽车研发、测试和标准制定的中国道路驾驶场景库,以支持自动驾驶汽车的开发、测试以及标准体系的建设。通过融合事故场景数据、自然驾驶场景、自动重构场景、路侧交通流场景、国内外标准规范场景、驾驶模拟器场景在内的多方面数据,来构建多类场景、多维要素的自动驾驶测试场景。
自动驾驶汽车场景库建设需求与来源渠道
相比M-City,上海示范区的最大优势在于覆盖场景较为全面,通过柔性设计可以保证测试区内环境要素的多样性,随着“昆仑计划”场景库的不断积累,也将进一步丰富场景数量,满足多层次、多类型的交通场景重构需求。与此同时,通过对场景数据的分析、提取,可以帮助测试场探索标准化的自动驾驶测试体系,为自动驾驶汽车的性能测试、安全性认证提供可参考的评估标准,更能够为道路测试规程,乃至未来自动驾驶产品的技术标准建设提供可量化的支持。
运营模式方面,上海示范区同样采用了与M-City 类似的会员制度,按照不同级别会员(金牌、银牌和普通会员)和普通测试(按天)进行收费,成员单位涉及多行业领域,能够为测试场的技术迭代和方案优化带来很好的促进作用。
-
智能交通
+关注
关注
12文章
851浏览量
45228 -
大数据
+关注
关注
64文章
9099浏览量
144087 -
自动驾驶
+关注
关注
795文章
15012浏览量
181716
原文标题:全球自动驾驶测试与商业化应用报告(三):自动驾驶测试的内容及自动驾驶封闭测试分析
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
滴滴自动驾驶与广汽埃安新一代Robotaxi R2获得北京智能网联汽车道路测试牌照
走进赛目科技智能网联汽车封闭测试场
汽车自动驾驶的太阳光模拟应用研究


自动驾驶仿真测试有什么具体要求?

自动驾驶测试有哪些要求规范?

小马智行三城开启全天候自动驾驶测试
卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

小马智行第七代自动驾驶车辆广深开跑
自动驾驶技术测试有哪些?

自动驾驶技术落地前为什么要先测试?
搭建完整的ADAS测试链路,推动自动驾驶技术的安全发展
萝卜快跑在香港的自动驾驶测试区域再扩大
百度最新消息:萝卜快跑在港自动驾驶测试区再扩大 百度智能云持续领跑中国大模型




评论