 沈阳自动化研究所机器人学研究室微纳米课题组在类生命机器人使能领域的最新成果
沈阳自动化研究所机器人学研究室微纳米课题组在类生命机器人使能领域的最新成果

近日,国际学术期刊Small以封面刊载的形式,邀请刊载了中国科学院沈阳自动化研究所机器人学研究室微纳米课题组在类生命机器人使能领域的最新成果。该研究利用与超声加工、检测协同设计的纳米操作机器人实现了亚微米尺寸的二硫化钼场效应管的制造,为建立工程化细胞的多维信息同步获取接口提供了有效途径,为实现基于活体细胞的生命本征感知器件的成功制造奠定了基础。
Small封面刊载沈阳自动化所微纳米课题组科研成果
该研究将超声与纳米操作机器人结合,将超声的优异特性引入了纳米尺度,利用超声加工的冲击特性提升了加工结构边缘的线性度、减小了加工力,利用超声相位检测与加工能量损耗之间的特定关系实现了任务空间内加工深度的闭环控制,提出了“相位模式”的加工方法,克服了传统纳米操作机器人加工存在的突出问题,并且结合剥离工艺(lift-off)实现了亚微米尺寸的二维材料场效应管的一体化的制造,为基于活体生物材料—二维材料—半导体材料的类生命感知器件的制造提供了更为有效、便捷和灵活的使能技术。
近年来,沈阳自动化所微纳米课题组基于生命系统与机电系统相融合的类生命机器人研究理念,围绕类生命使能技术、类生命感知、类生命驱动和类生命智能开展相关研究。本次封面刊发的研究成果展现了基于先进类生命机器人使能技术的机器人感知系统由非生命介质向生命体介质转变的可能性,向着全面建立类生命机器人系统坚实迈进。课题组该领域的前期成果先后发表在Nature Communications,Small,ACS Applied Materials & Interfaces,Lab on a Chip,Nanoscale,IEEE Trans汇刊等国际期刊,研究布局逐步系统化、体系化,为未来取得更好的成果奠定了工作基础。
-
机器人
+关注
关注
214文章
31650浏览量
224558 -
纳米
+关注
关注
2文章
731浏览量
42712 -
自动化
+关注
关注
31文章
6019浏览量
90847
原文标题:Small:沈阳自动化所纳米操作机器人研究取得新进展
文章出处:【微信号:Microfluidics-Tech,微信公众号:微流控科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于3D视觉引导的移动式复合机器人设计:智能自动化革命的核心技术

黑芝麻智能与联想研究院机器人实验室达成战略合作
探索RISC-V在机器人领域的潜力
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
富唯智能复合机器人力控技术:重新定义精准自动化
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
NVIDIA展示机器人领域的研究成果
中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测

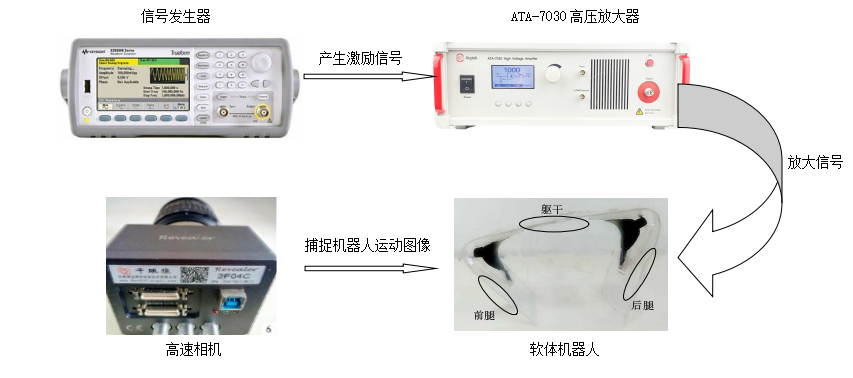
高压放大器在软体机器人研究中的应用




评论