 中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测
中国科学院沈阳自动化研究所:研究基于石墨烯/PDMS封装的医用胶带柔性传感器,用于水下机器人运动检测

水下环境感知对机器人操作至关重要。由于柔性传感器能够适应各种形状和表面,因此在深海生物捕获、环境检测和机械操作等科学应用中具有广泛的应用前景。然而,面对复杂的水下环境,实现水下柔性传感器以满足众多水下应用的需求仍是一项重大挑战。本文,中国科学院沈阳自动化研究所郭洪吉等研究人员在《ADVANCED MATERIALS TECHNOLOGIES》期刊发表名为“A Nanocrack-Based Graphene/PDMS-Encapsulated Medical Tape Flexible Sensor for Motion Detection of Underwater Robots”的论文,受仿生结构启发,如蝎子腿关节和荷叶表面,提出了一种基于石墨烯/聚二甲基硅氧烷(PDMS)的柔性应变传感器,其敏感性基于纳米裂纹效应。
该医用胶带纳米裂纹基传感器展现出高灵敏度(GF = 1.98)、高疏水性(接触角 = 133°)及弯曲循环稳定性(5000次循环测试后ΔR/R0 < 0.2)。此外,该传感器可应用于机器人手部实现精准姿态监测与交互感知。本研究成果为水下柔性传感提供了创新解决方案,对提升水下机器人及其他相关海洋领域的操作灵活性具有重要潜力和应用价值。
图文导读

图1、纳米裂纹敏化石墨烯/PDMS 封装医用胶带柔性应变传感器的制造工艺。
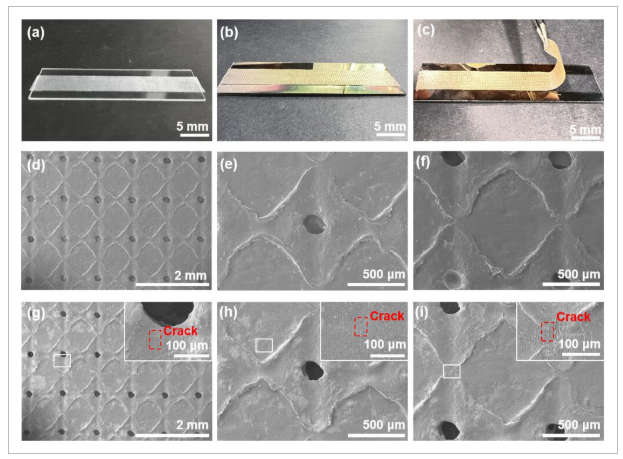
图2. 在医用胶带上制造纳米裂纹。
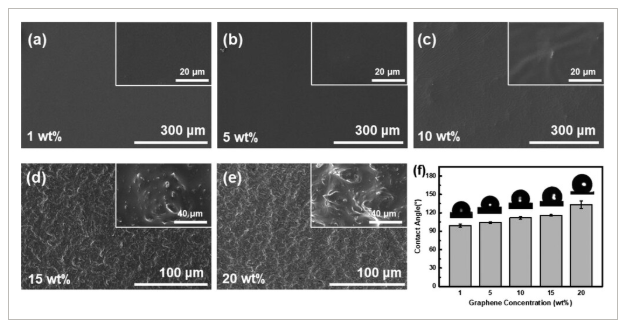
图3、不同浓度石墨烯/PDMS 的形态特征。
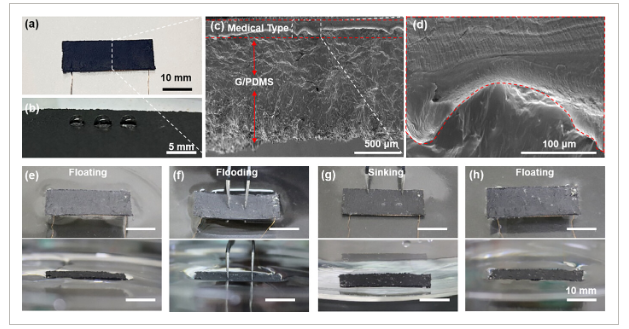
图4. NbG/PeMT 在水浸后发生变化。
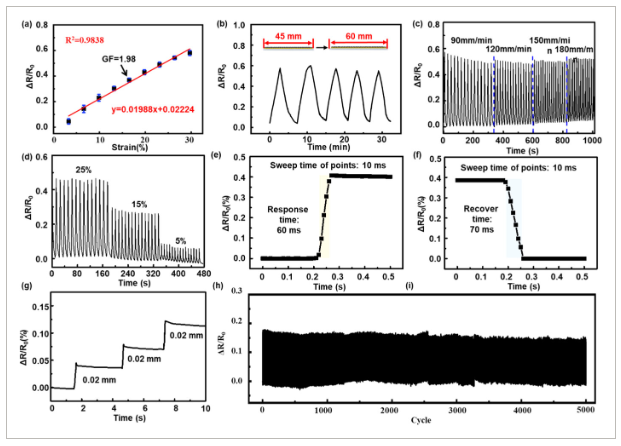
图5. 纳米裂纹敏化石墨烯/PDMS 封装的医用胶带柔性应变传感器的性能测试图像。
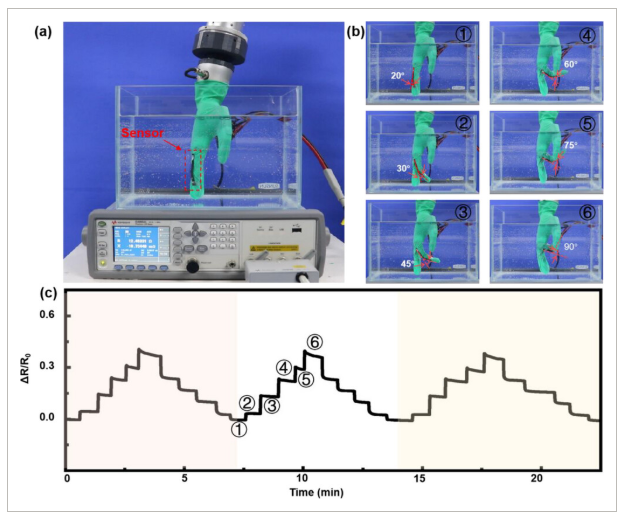
图6、NbG/PeMT集成到机械手食指的近端手指关节中。
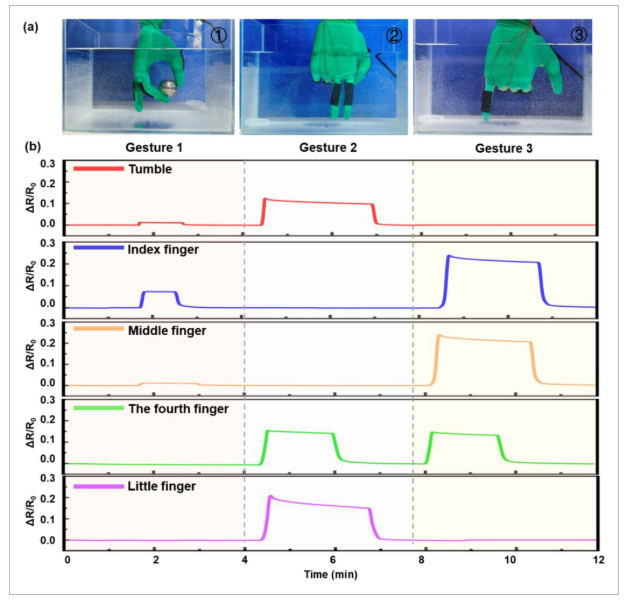
图7. NbG/PeMT的应用集成了机械手,用于不同的手势识别。
小结
一种基于纳米裂纹的石墨烯/聚二甲基硅氧烷(PDMS)封装医疗胶带柔性传感器用于水下机器人姿态检测的新型方法已被提出。该传感器的制造过程简单,适合大规模生产。其设计包括医疗胶带基底、作为电极的纳米裂纹金(Au)层,以及用于封装的石墨烯/PDMS层。实验结果表明,基于纳米裂纹的石墨烯/PDMS封装医疗胶带传感器应变测量范围可达30%,灵敏度为GF 1.98。经过5000次疲劳测试后,传感器展现出优异的稳定重复性。机器人手指姿态监测实验证实了该传感器对水下机器人手部运动状态的实时监测能力。综上所述,我们提出了一种水下柔性传感器的封装方法。本文提出的NbG/PeMT传感器具有高线性灵敏度、宽测量范围、简单结构和良好重复性,使其在水下机器人姿态监测及其他相关海洋领域具有广阔应用前景。
文献:
https://doi.org/10.1002/admt.202500620
来源:材料分析与应用
-
石墨烯
+关注
关注
54文章
1617浏览量
85542 -
运动检测
+关注
关注
0文章
42浏览量
12901 -
水下机器人
+关注
关注
2文章
105浏览量
14502 -
柔性传感器
+关注
关注
1文章
125浏览量
4902
发布评论请先 登录
水下机器人测试:为深海“探路者”铸就的极限生存考验

北京理工大学与中国科学院:研究自适应模量压力传感器阵列,赋能无线触觉可视化

你以为它只是个铁台子?其实是电机性能的“终极考官”
合力泰到访中国科学院福建物质结构研究所调研交流
中国科学院西安光机所自研原位传感器 解锁深海移动观测新方式
中国科学院自动化研究所一行莅临智行者考察调研
中国科学院金属研究所:柔性单通道多功能热电半导体传感器件研究取得重要新进展

中国科学院:高线性类皮肤柔性传感器研究取得系列进展
润和软件与中国科学院广州生物医药与健康研究院达成战略合作

中国科学院院士王曦,递补为中央委员

华为、中国科学院计算技术研究所联合开发论文获USENIX收录

中科院宁波材料所:双结构石墨烯/PDMS复合传感器,用于可穿戴设备应用
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
中国科学院自动化研究所携手中科曙光打造高性能工具链解决方案
恭贺 | 晟鹏创始人成会明院士当选欧洲科学院院士!




评论