 虹科具身智能全栈解决方案:从Demo到量产的工程落地指南
虹科具身智能全栈解决方案:从Demo到量产的工程落地指南

引言:具身智能的复杂性在于“大脑”与“身体”的协同。大模型提供了强大的认知,但物理世界的交互、实时响应和工程可靠性,仍是横亘在"惊艳Demo"与"可靠量产"中间的另一座大山。本文旨在揭示具身智能产业从研发到量产的核心问题,说明虹科具身智能核心零部件与研发测试方案如何解决"最后一公里"的工程落地!
从惊艳的Demo到可靠的量产:
我们共同面对的具身智能工程鸿沟
想象这样一个场景:
一台部署在3C电子工厂的机器人,其任务是精准抓取流水线上的微型摄像头模组。在实验室的稳定光照下,它的识别成功率高达99.9%。然而,当它来到真实产线,面对闪烁的LED灯、金属反光以及偶尔飘过的粉尘时,识别开始漂移,抓取动作变得迟疑,甚至因误判而将精密元件撞落。这不仅仅是算法问题,更是物理世界对机器人“身体”提出的严苛考验。
具身智能的终极目标,是让智能体在真实世界中稳健地行动。当前整个行业正处于技术快速更迭、规模化量产落地的关键时期,然而,从实验室的受控环境走向工厂、仓库、园区等复杂场景,机器人开发者普遍面临着一道工程鸿沟:
环境感知层:看得见但看不准
复杂光照、动态遮挡下视觉感知频繁失效
极端工业环境(粉尘、油污、电磁干扰)下可靠性明显下降
定位导航实验室表现良好,实际场景中常出现漂移
决策控制层:算得准但控得慢
多关节同步控制精度不足,动作卡顿、错位甚至失控
实体硬件调试试错成本高昂,一次失误可能造成硬件损坏
多传感器数据处理算力紧张,决策响应难以匹配动态环境
物理执行层:动得了但做不精
末端抓取力控精度不足,无法稳定处理易碎、异形物品
动作响应存在延迟,难以实现流畅的人机协同
传统执行器集成度低,布线复杂、维护不便
全链路协同:拼得起但合不上
感知、决策、执行模块来自不同供应商,接口协议不统一
客户需要投入大量精力做跨模块集成适配,周期长、风险高
研发数据管控零散、多方协同效率偏低、研发成果难以顺畅衔接量产环节
供应链与制造体系不匹配,合规与成本管控压力大
这些问题往往相互交织,使得从原型验证到稳定量产的道路充满挑战。
上述挑战并非个例,而是行业普遍面临的"量产之痛"。问题的根源在于:具身智能是一个系统工程,感知、思考、行动任何一个环节的短板,都会导致整体性能折损。虹科基于多年的工业现场服务经验,整合感知硬件、实时控制、通信网络与系统集成能力,推出具身智能核心零部件与研发测试解决方案——不是为了解决单一问题,而是为您的机器人打造一套真正可用的"身体系统"。
虹科具身智能全栈方案:
打通感知 - 思考 - 行动全链路
虹科及旗下姐妹公司(友思特、康谋、宏集、德思特)深刻理解这具身智能工程落地的“最后一公里”难题。我们提供的不只是零部件,而是覆盖“感知 - 思考 - 行动”全链路的一站式解决方案,旨在帮助人形机器人及具身智能研发团队,将前沿的智能构想转化为稳定、可靠、经济的物理现实!
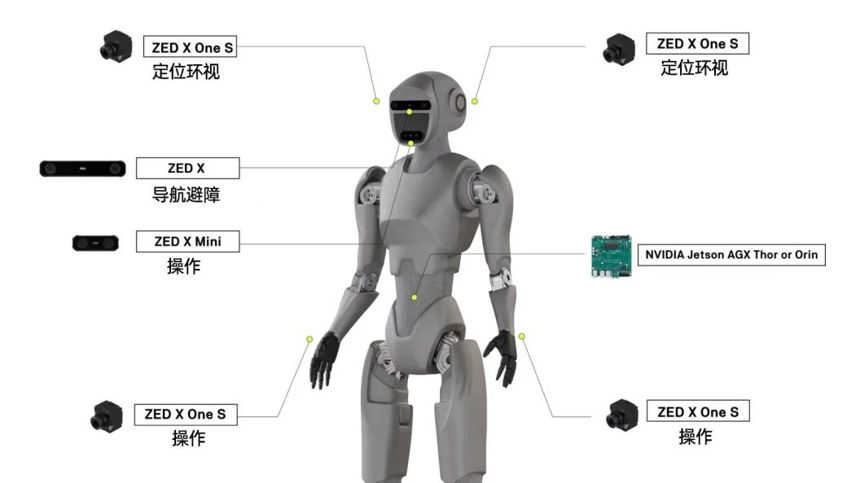
感知层:依托ZED双目相机实现毫米级三维感知,搭配GNSS和弱网测试仪完成全场景定位仿真验证,解决复杂环境认知不准和通信不稳定问题。
思考层:通过EtherCAT、CAN FD 实现低时延实时控制,搭载多引擎仿真平台与高性能AI算力,降低调试成本、提升决策效率。
行动层:采用Berghof控制器与精密伺服执行器,实现微秒级响应与柔性力控抓取。

虹科具身智能解决方案构架图
感知层:赋予机器人精准的"眼睛和耳朵"
解决 "看不清、认不准、定不准" 的核心问题
行业痛点
三维感知在复杂场景下鲁棒性不足,实时三维重建精度难以满足工业级需求;
户外作业时空定位依赖外场测试,存在成本高、周期长、场景覆盖不全等问题,制约 “感知 - 决策” 闭环形成。
解决方案
深度视觉赋能:依托友思特 Stereolabs ZED 双目相机(GMSL/USB 双接口形态),解析主流深度成像技术原理,攻克动态场景三维重建、复杂光照适应性等核心难题,搭配开源工具链实现软硬件协同开发,已在工业自动化、移动机器人等场景形成成熟落地案例。

ZED X双目相机
应用示例
定位仿真验证:为满足具身智能户外作业对高可靠时空感知的迫切需求,本方案以德思特GNSS模拟器为核心,建硬件在环(HIL)测试环境,将户外全域作业场景的定位验证转移至实验室,通过在实验室高保真复现多场景、多路径的全球卫星导航信号,实现对机器人定位模块的精准注入与闭环验证,完成对机器人高可靠时空感知的精准测试,为具身智能户外作业的定位稳定性提供全场景覆盖支撑。
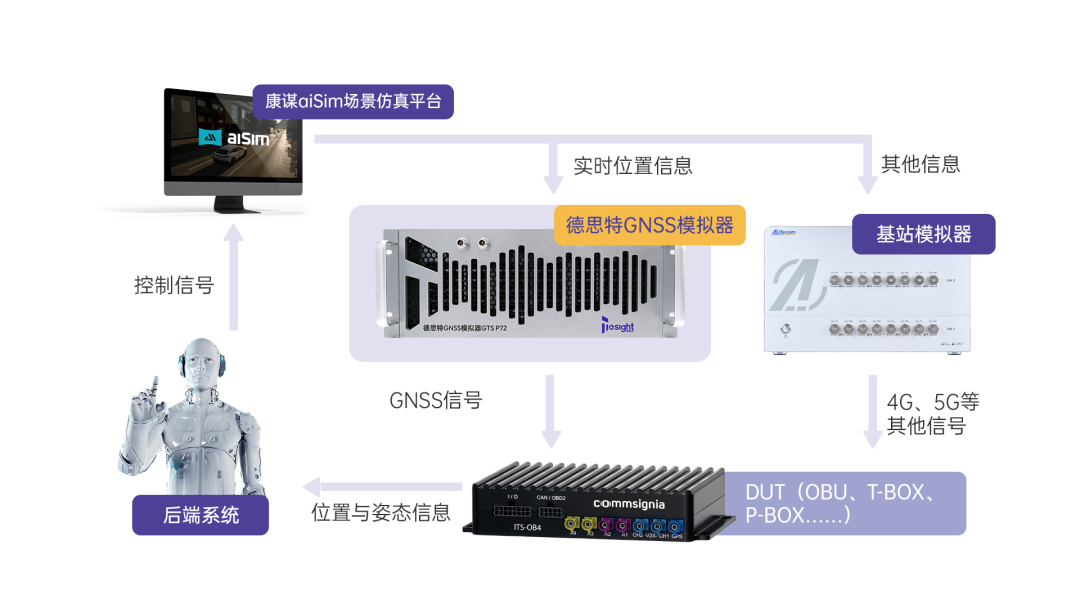
德思特GNSS模拟器方案
无线通信仿真验证:核心搭载德思特信号衰落模拟设备,高精度可编程模拟多通道射频信号衰减,高保真复现具身智能户外作业面临的信号遮挡、高速移动、城区衰落、干扰叠加等真实弱网环境,将户外无线通信验证转移至实验室,完成通信模块在弱网、断连、干扰、切换等边缘工况下的自适应调节、链路重连、数据稳定传输与多模无缝切换的闭环测试,为具身智能全域户外作业提供通信稳定性、抗干扰性与传输可靠性的全场景验证支撑。
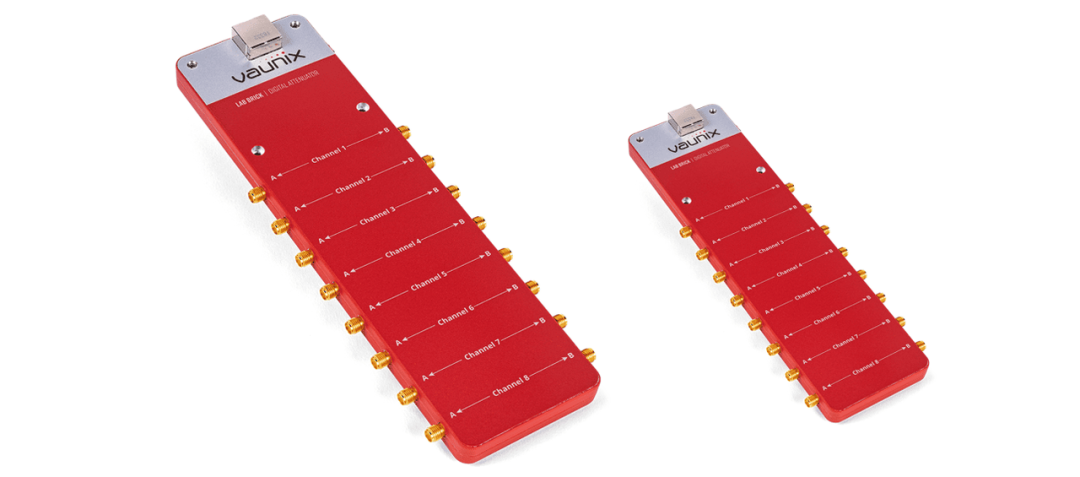
德思特信号衰落模拟设备
合作案例
场景:研发针对汽车及3C行业的工规级具身智能机器人
挑战:需在粉尘、油污、电磁干扰等极端工业环境下,实现毫米级的零部件识别与高频自主避障
方案:友思特 ZED X 工业深度相机解决方案
极致感知:全局快门+1200P分辨率,提供2m内高达±0.4%的深度精度
工业级可靠性:IP67防护等级,GMSL2抗干扰传输,无惧严苛生产线
敏捷开发:原生支持ROS/Python,深度集成NVIDIA Isaac Sim仿真平台
客户价值:大幅缩减集成周期,助力客户成功打造出具备强自主意识的工规级机器人,实现从“实验室算法”到“工业生产力”的快速转化
合作客户:科大讯飞、聆动通用、中科光电、海微、穹彻智能、小雨智造、大晓机器人



友思特与安徽聆动通用机器人(科大讯飞旗下子公司)的具身机器人核心团队,签订战略合作协议,ZED X搭载在其具身智能机器人中
思考层:打造高效的 "大脑和神经"
解决 "算不动、传得慢、试错贵" 的核心问题
行业痛点
多轴精密运动控制依赖专用控制卡,导致系统成本高、扩展性差;
机器人内部通信存在延迟与兼容性问题,关节线缆束缚影响机械设计灵活性;
Sim2Real 迁移不稳定,虚拟仿真与物理世界存在适配鸿沟。
解决方案
实时通信与控制赋能:CAN FD凭借其高传输速率、大载荷容量、高可靠性及低布线成本优势,适用于人形机器人灵巧手的毫米级运动控制、毫牛级力控反馈等对实时性与精度要求极高的任务。基于CAN FD技术,虹科提供的多路CAN FD总线工作站、虹科PCAN-Explorer 7定制化软件平台为机器人领域中高速指令下发、多传感器数据回传及全链路测试提供高效技术支持与一体化解决方案。

虹科灵巧手控制系统
数字孪生验证:搭建机器人运动控制数字孪生平台,实现虚拟环境下的无限次测试迭代,优化运动控制算法参数,缩小 Sim2Real 迁移差距,提升技术落地效率。
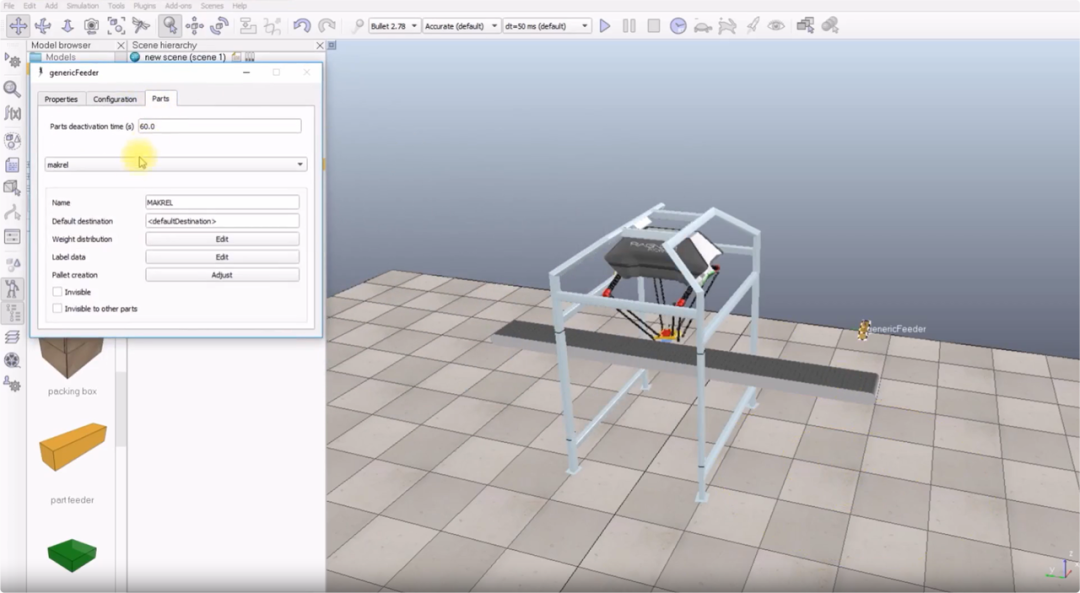
康谋CoppeliaSim机器人仿真平台
AI算力盒子:高达2000TOPS算力与多通道视觉接口,高效运行复杂神经网络,为具身智能系统提供强劲加速

友思特AI算力盒子
合作案例
场景:研发高性能人形机器人,用于复杂动态工况,需要高实时、高同步的总线通信系统保障多关节运动与传感协同
挑战:人形机器人存在多关节同步精度差、传感数据传输时延高、环境姿态响应滞后且传统总线网络拓扑单一、拓展可靠性不足的行业痛点
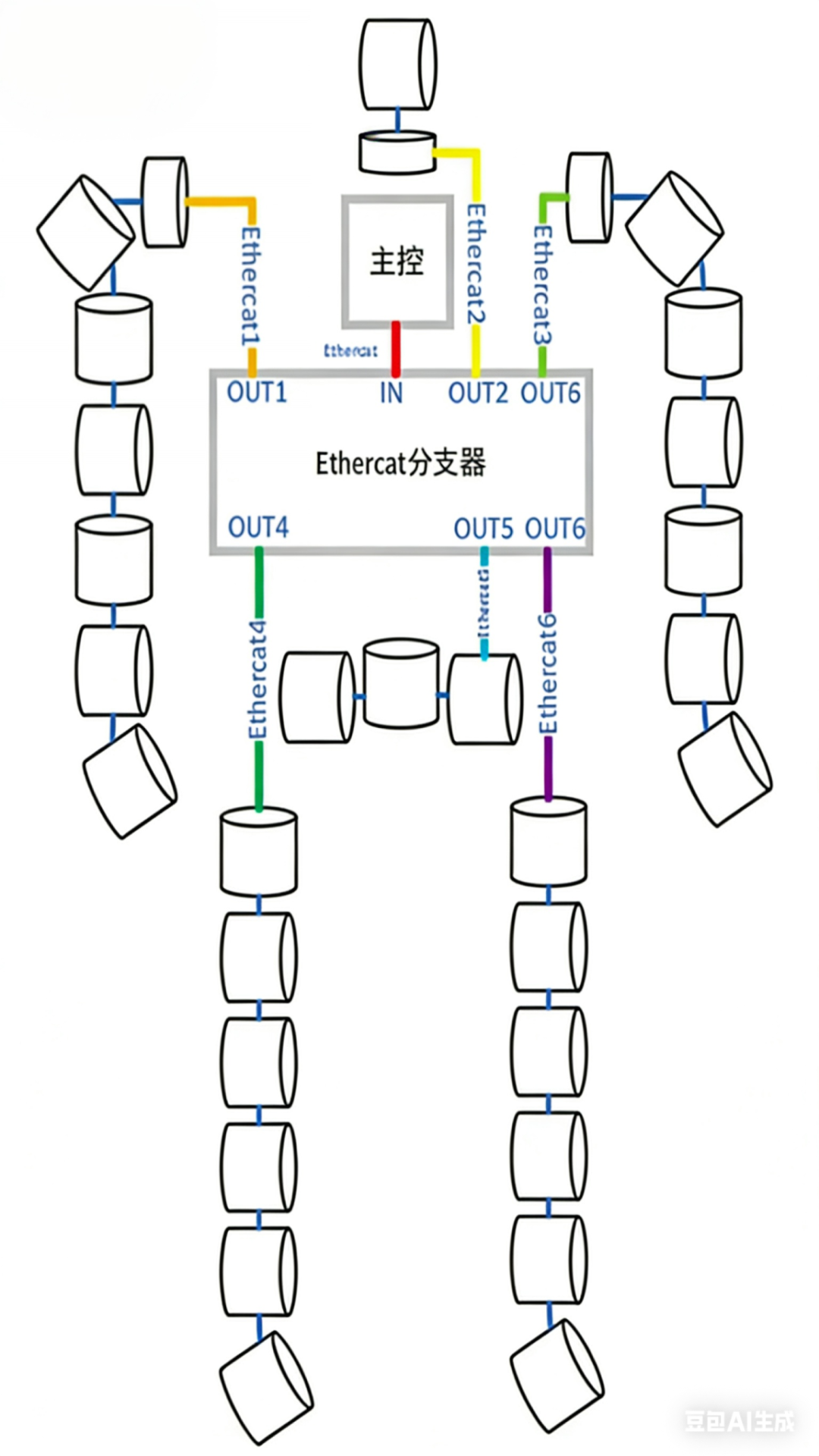
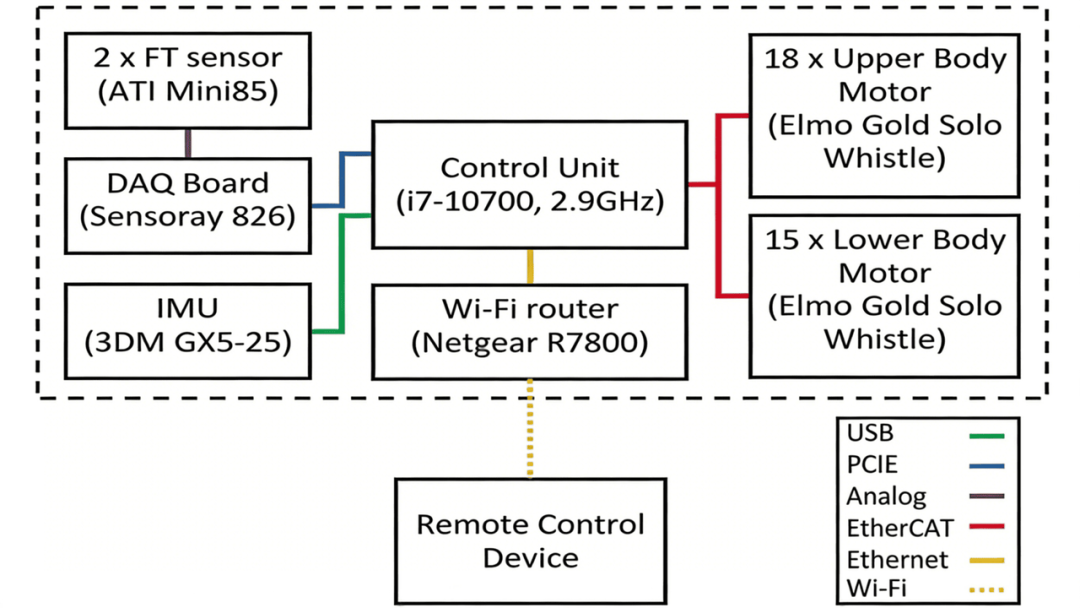
方案:虹科EtherCAT总线人形机器人通信解决方案
高精度关节同步:分布式时钟同步机制,保障多关节步态协同、运动平稳
低时延传感传输:极低通信延迟,实现力控反馈与多传感器融合
高速姿态调控:高带宽实时传输,快速响应外部环境、动态调整姿态
灵活拓扑组网:支持多种网络结构,布线灵活、扩展性强
客户价值:不仅优化机器人运动控制能力、提升整机运行性能与环境适配性,还能简化开发流程、降低研发成本
合作客户:优必选、ART ROBOT、云深处
|
虹科EtherCAT总线 人形机器人通信解决方案 |
行动层:赋予机器人灵巧的"关节和手脚"
解决 "动不准、抓不牢、不安全" 的核心问题
行业痛点
执行器集成度低、力控精度不足,难以满足仿生手、灵巧手的精细操作需求;
动作控制响应滞后,稳定性与动态适配性无法匹配复杂工业场景,制约人机协同与物理世界交互质量。
解决方案
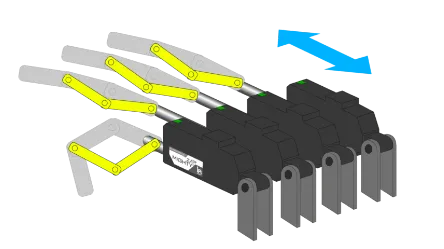
精密执行器部署:采用宏集 IR Robot 小型线性伺服执行器,凭借高集成度、高精度特性,实现仿生手、灵巧手的精准抓取力控与复杂动作复刻,完美适配人机协同场景下的精细操作需求。

宏集 IR Robot 小型线性伺服执行器
模块化控制支撑:搭配 Berghof 模块化控制器,基于 CODESYS 软件开发平台,构建高效的本地控制架构,实现传感器信息实时处理与运动控制算法快速执行,保障动作响应的稳定性与迅捷性,充当机器人 “动作控制小脑”。

宏集Berghof 模块化控制器
合作案例:人形机器人灵巧手/关节测试
场景:研发人形机器人灵巧手,应用于工业分拣、医疗康复、科研实验等场景,需要高精度总线测试系统完成灵巧手运动控制、传感采集与性能检测
挑战:灵巧手多关节协同运动复杂,对通信传输速率、时间戳精度、控制延迟要求严苛,亟需高精度总线测试方案实现多传感器信号采集与精细动作调试
方案:虹科CAN FD灵巧手控制系统测试方案
高速总线硬件:搭载8路CAN(FD)及车载以太网接口,适配灵巧手高传输速率,实现微秒级高精度时间戳,保障指令下发与数据回传稳定
多维数据监测:依托PCAN-Explorer6软件平台,实时解析电流、温度、角度、力传感器等信号,支持左右手独立可视化监控
超低延迟控制:支持一键手势指令与多关节精细调控,传输延迟偏差<5μs,满足毫牛级高精度力控同步要求,兼容离线数据分析与故障排查
客户价值:实现灵巧手全链路数据可追溯、测试流程可复现,大幅提升调试精度与研发效率
合作客户:灵巧智能、seed robotics
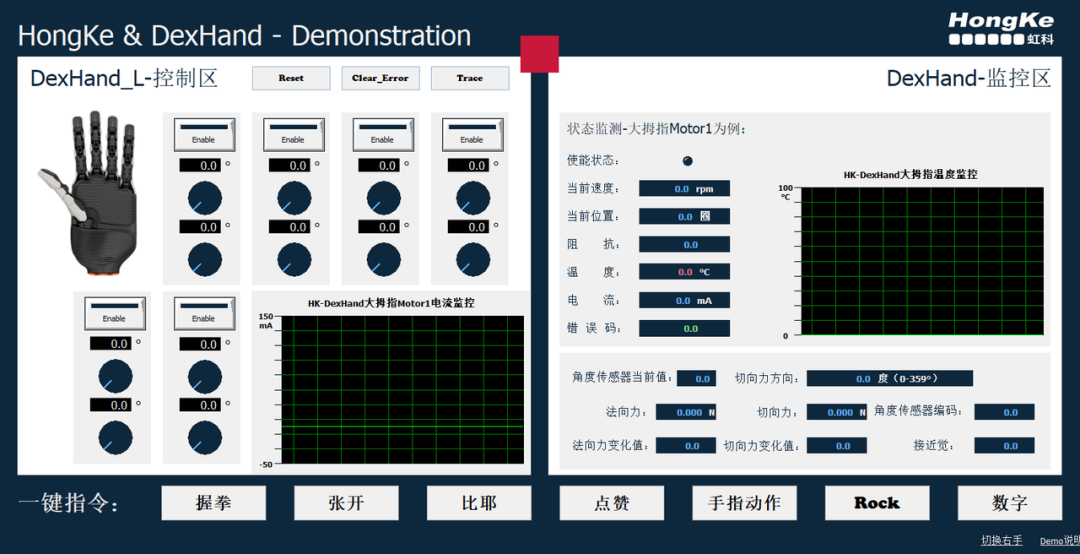
虹科CAN FD灵巧手控制系统测试方案
这些挑战,您是否也在面对?
我们的技术方案源于与众多前沿团队的共同实践,旨在服务那些正致力于将智能机器人从实验室推向广阔天地的探索者。如果您正在面临以下挑战,我们的经验或许能为您提供参考:
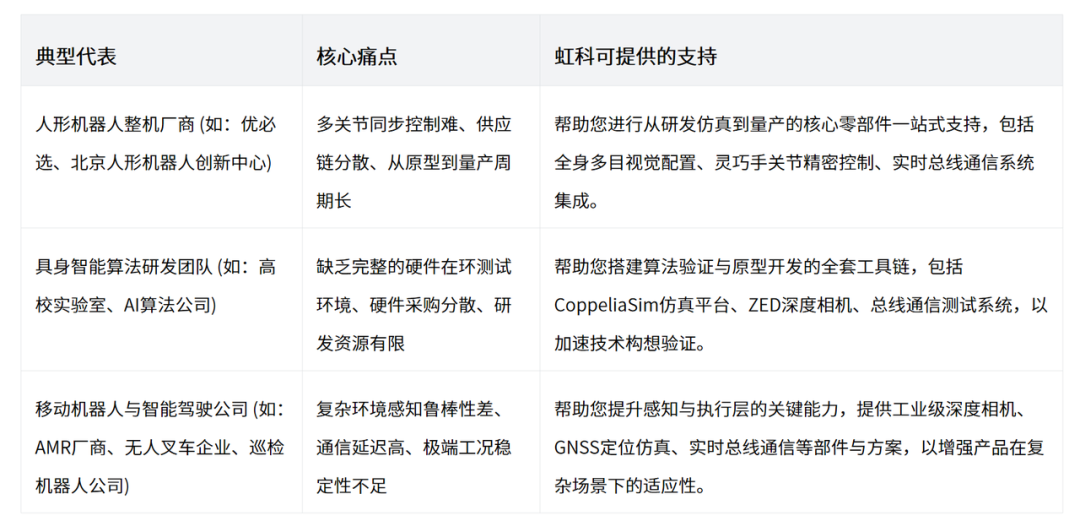
具身智能团队痛点与所需支持
如果您是:人形机器人整机厂商
典型代表:优必选、北京人形机器人创新中心、通用人形机器人创业公司
核心痛点:多关节同步控制难、供应链分散、从原型到量产周期长
虹科提供:从研发仿真到量产核心零部件的全周期支持,包括全身多目视觉配置、灵巧手关节精密控制、实时总线通信系统等一站式解决方案,帮助您快速完成产品迭代与量产爬坡。
如果您是:具身智能研发团队
典型代表:高校实验室、科研院所、AI算法创业公司
核心痛点:缺乏完整测试环境、硬件采购分散、研发资源有限
虹科提供:算法验证、原型开发与系统集成的全套工具链,包括 CoppeliaSim 仿真平台、ZED 深度相机、总线测试系统等,帮助您用最少的资源快速验证技术构想,缩短研发周期。
如果您是:移动机器人与智能驾驶公司
典型代表:AMR厂商、无人叉车企业、特种车辆研发商、巡检机器人公司
核心痛点:复杂环境感知鲁棒性差、通信延迟高、极端工况稳定性不足
虹科提供:感知与执行层的关键部件与解决方案,包括工业级深度相机、GNSS 定位仿真、实时总线通信等,帮助您提升产品在复杂场景下的适应性与可靠性。
此外,我们的方案也已在工业自动化(高速分拣、精密装配)、物流仓储(自主导航、货物抓取)、农业科技、医疗健康及能源电力等多个行业场景中得到泛化应用,致力于帮助各行各业的机器人“看得更清、想得更快、做得更准”。
人形机器人
全身多目视觉配置,灵巧手关节精密控制
工业自动化
Delta/SCARA机器人的高速分拣、精密装配
物流仓储
AGV/AMR自主导航、货物识别与抓取
农业与特种车辆
精准喷洒、产量监测与自主路径规划
不止于产品:
贯穿研发到量产的全周期服务
我们深知,可靠的机器人系统落地,远不止于采购优秀的零部件,更依赖于贯穿始终的工程经验与协同支持。虹科的价值在于,我们能够作为工程合作伙伴,在机器人开发的不同阶段提供具体的服务:
研发测试阶段:通过CoppeliaSim仿真验证平台与EtherCAT/CAN/TSN网络测试方案,帮助团队在数字空间提前跑通感知-规划-控制闭环,将联调前移,大幅缩短调试周期、降低实物试错成本。
量产阶段:提供ZED系列视觉系统、伺服执行器与总线通讯板卡,作为对现有供应链的补充与优化,助力客户实现成本控制与性能提升。
虹科提供的不只是零部件,而是从虚拟验证到物理部署的“最后一公里”完整工程能力,助力您进行具身智能研发到量产。
独家一站式协同优势:整合感知(友思特、德思特)、仿真(康谋)、控制与执行(宏集)全链路能力,客户只需对接一个窗口,无需多头协调,彻底解决软硬件碎片化难题。
深厚工程落地能力:我们不仅是硬件供应商,更是具备 10 年以上工业自动化经验的工程合作伙伴。从前期需求评估到后期现场部署,全程提供专业技术支持。
开放兼容的技术生态:深度支持 ROS/ROS2、CODESYS 等开源与工业标准生态,适配 NVIDIA Jetson 全系列计算平台,确保您的技术路线长期灵活可扩展。


虹科具身智能合作客户
结语
具身智能的终极战场,从来不在实验室的演示台上,而在工厂的生产线、仓库的分拣区、农田的阡陌间,在每一个需要真实物理动作的真实场景里。当大模型赋予了机器 "思考" 的能力,如何让它们 "稳健地行动",成为了产业落地的最后一道关口。
虹科始终相信,真正的具身智能解决方案,从来不是零散硬件的简单拼凑,而是感知、思考、行动全链路的深度协同。我们整合感知(友思特、德思特)、仿真(康谋)、控制与执行(宏集)全链路核心能力,打造了从虚拟仿真验证到物理实体部署的完整工程体系,只为帮您跨越从 "算法原型" 到 "量产产品" 的鸿沟。无论您是正在攻克人形机器人量产难题的整机厂商,还是专注于算法创新的研发团队,亦或是转型的移动机器人与智能驾驶公司,虹科都能为您提供经过头部客户验证的可靠方案。从需求评估到现场部署,从技术培训到售后支持,我们将全程陪伴,成为您在具身智能时代最值得信赖的合作伙伴!
-
机器人
+关注
关注
214文章
31682浏览量
224604 -
虹科电子
+关注
关注
0文章
792浏览量
15399 -
具身智能
+关注
关注
0文章
566浏览量
922
发布评论请先 登录
让研发周期缩短40%!匠芯创全栈“芯片+算法+方案”加速具身智能落地

让研发周期缩短40%!匠芯创全栈“芯片+算法+方案”加速具身智能落地

2026年具身智能产业全景深度解读

芯驰科技正式发布面向具身智能的全栈式芯片解决方案

硬件全链自主,昇腾芯+香橙派主控+国产关节传感器,具身智能硬件国产化全景解析
解读《2026 具身智能行业研究报告》:国产化提速,万亿市场加速落地

从硅基智能到碳基世界:CES Asia 2026具身智能产业融合大会定档北京
华清远见AI全栈工程师课程重磅升级!新增具身智能机器人+大模型课程深度强化,抢占AI高薪岗位!

具身智能规模化落地卡在何处?灵境智源正叩响“四扇门”的最后关隘

具身智能交流会
全方位解读黑芝麻智能SesameX多维具身智能计算平台




评论