 缩短40%迁移周期:如何构建具身智能高可靠验证底座?
缩短40%迁移周期:如何构建具身智能高可靠验证底座?

尊敬的研发工程师:
在具身智能的研发进程中,您是否也正面临以下挑战?
物理样机调试风险高:极端动作测试易导致硬件损坏,每次“炸机”都意味着高昂的维修成本与研发进度延误。
算法迭代周期长:强化学习训练依赖海量试错,在真实硬件上直接训练面临机械磨损与维护费用的双重压力。
Sim-to-Real 迁移难:仿真环境与真实物理差异过大,导致策略迁移后表现大幅下降。
或许,CoppeliaSim能够帮你解决上述难题!一款基于分布式控制架构的多功能机器人仿真平台,能在虚拟空间中完成具身智能体的全流程验证,帮助您将研发风险前置、成本大幅降低。
为什么考虑CoppeliaSim?
CoppeliaSim提供高保真的虚拟验证环境,帮助您在零硬件损耗下完成算法验证与物理交互测试,显著缩短Sim-to-Real的迁移周期,是具身智能研发的“加速器”。

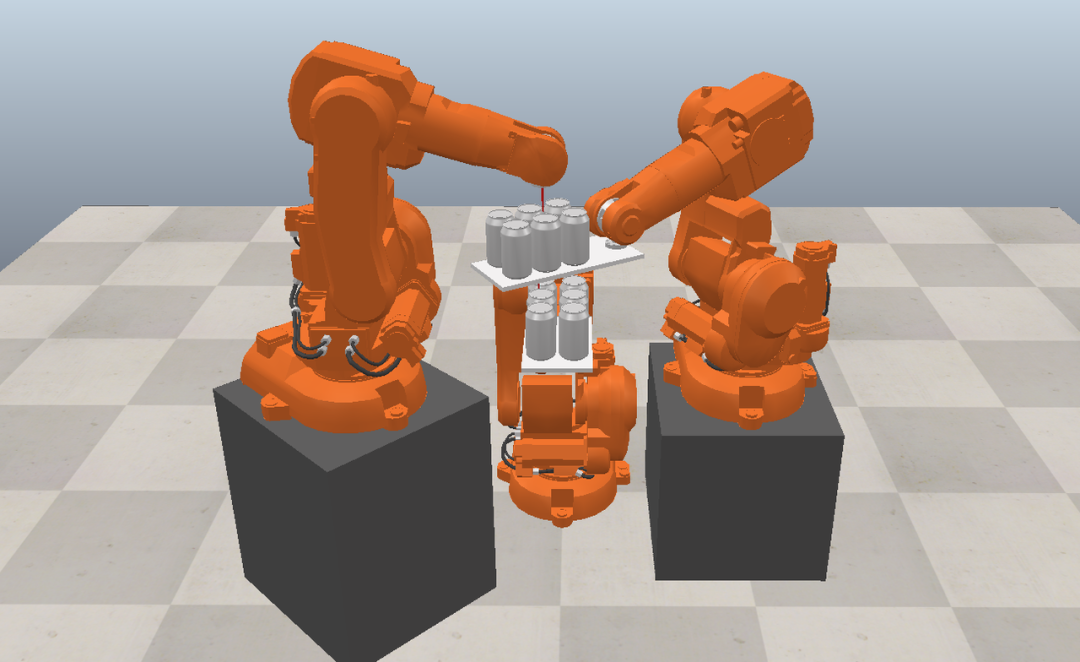
极致的真实物理交互
- 内置MuJoCo、Bullet、ODE等5款主流物理引擎
- 精准模拟碰撞、抓取、软体交互、绳索布料等复杂场景
- 为Sim-to-Real提供坚实的底层物理支撑
专为算法训练与“脑干协同”设计
- 合成数据工厂可自动生成深度、语义、力觉等标注数据
- 支持正逆运动学求解,适配分支、闭环、冗余自由度等复杂机构
- 集成OMPL库,可实现灵活高效的路径与运动规划
无缝对接主流开发生态
- 支持Python、Lua、C++、MATLAB等7种语言接口
- 适配人形、机械臂等各类具身智能体模型开发
长效研发资产构建
- 通过边界测试与风险规避,模拟极端工况及硬件失效场景
- 实现策略训练成本集约,高频训练免去真实硬件磨损
- 缩短虚实迁移周期,预部署调优可有效降低迁移难度
典型应用场景
以下场景正是研发中最容易反复“掉坑”的环节——CoppeliaSim能在以下场景中帮助团队提前排雷。
人形/机械臂等本体构型快速迭代
修改关节自由度、传感器布局后即时验证效果,减少物理样机改版次数。
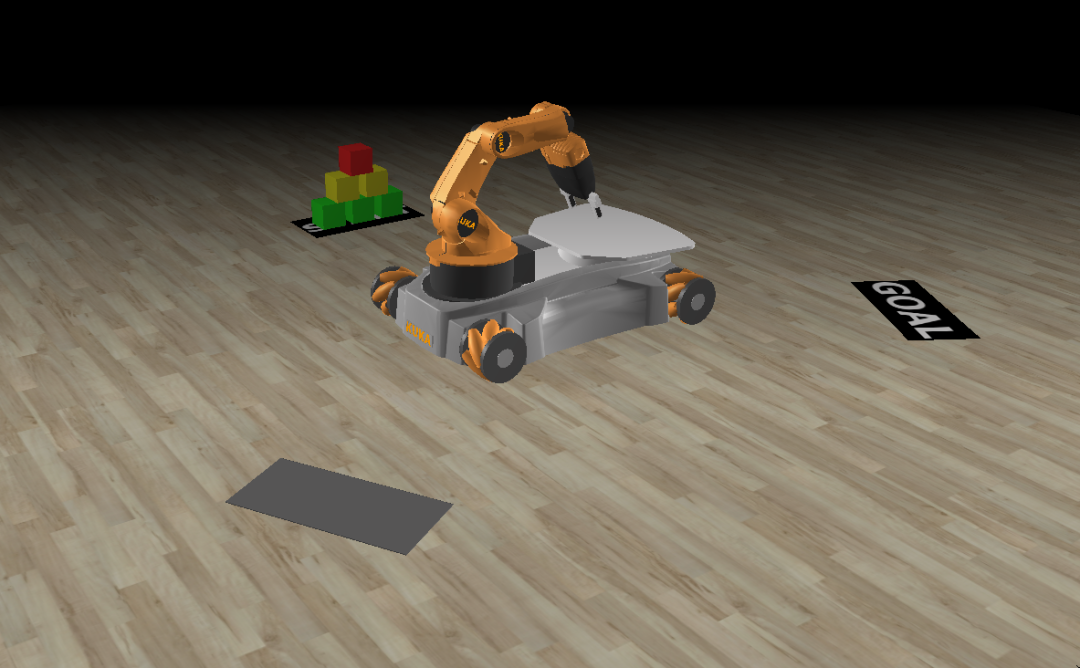
复杂任务策略部署
在虚拟家庭、仓库等非结构化场景中直观评估作业效能,跨环境切换测试算法鲁棒性。
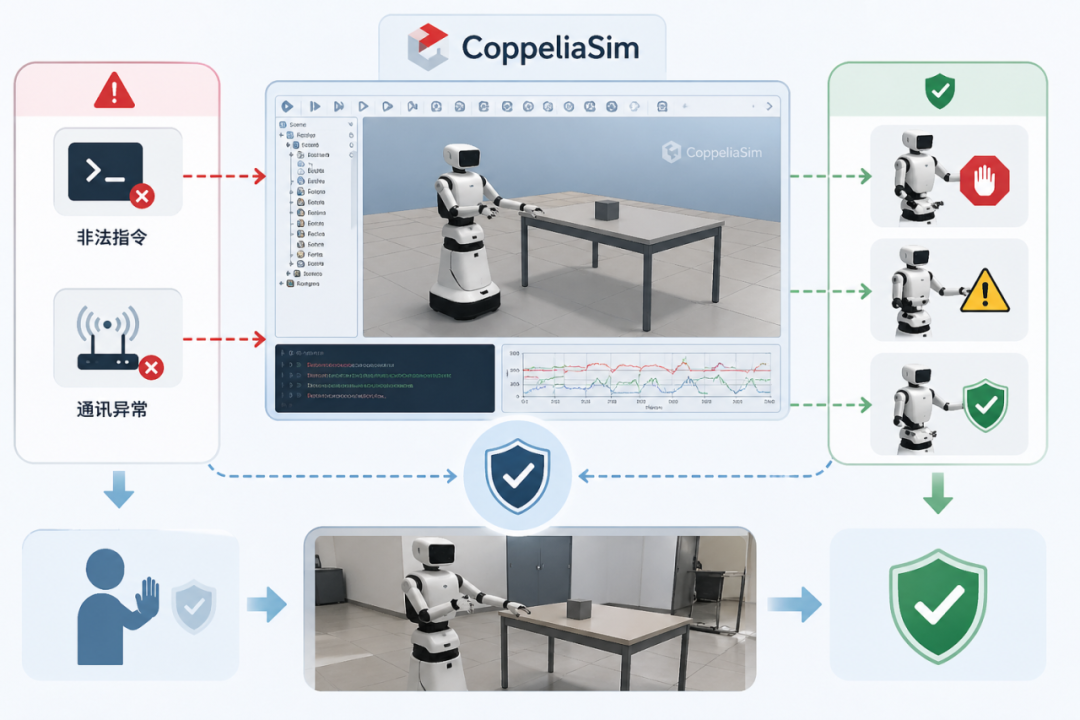
安全机制验证
模拟非法指令或通讯异常,确保机器人实地运行中的人机交互安全。
-
机器人
+关注
关注
213文章
31470浏览量
223699 -
具身智能
+关注
关注
0文章
475浏览量
909
发布评论请先 登录
瑞为技术参编起草的具身智能领域首个行业标准正式发布

openKylin与OpenLoong共推具身智能产业落地
具身智能交流会
从汽车到具身智能,TSN如何构建机器人的确定性未来?
构建生态新范式!开源大脑+小脑,地平线发布两款具身智能模型

2025开放原子开发者大会具身智能分论坛成功举办
什么样的智能体才能称为具身智能?

ADI如何构建具身智能的物理基石


【「AI芯片:科技探索与AGI愿景」阅读体验】+具身智能芯片

艾摩星机器人完成首个具身智能产品全链路功能验证




评论