 纳芯微绝对式磁编码器:原理、架构与工程应用
纳芯微绝对式磁编码器:原理、架构与工程应用

工业伺服系统对位置反馈核心器件提出高精度、高动态、强抗扰、宽温可靠、易集成、低运维六大核心要求,传统光电编码器存在玻璃码盘易碎、怕震怕油、结构复杂、装配门槛高等短板。纳芯微基于自研 AMR/TMR 磁阻传感技术,面向伺服运动控制推出单芯片一体化绝对式磁编码器解决方案,仅需搭配一枚单对极径向永磁体即可构成完整角度检测系统,以极简硬件架构、完整片上信号链、多维度实时误差补偿算法,实现上电即时绝对角度输出、超高分辨率与全工况稳定性。本文围绕伺服场景适配架构、正交磁敏检测原理、单芯片硬件集成设计、整机误差来源与分级补偿策略、伺服工程落地设计要点展开论述,为工业伺服位置闭环设计、国产编码器替代与高端运动控制硬件优化提供技术依据。
1 工业伺服应用痛点与磁编码器技术优势
1.1 伺服传统反馈方案痛点
工业伺服电机、行星减速机、精密执行模组长期依赖光电编码器,在严苛工况下存在明显短板:
机械脆弱:玻璃光栅码盘抗冲击、抗振动能力差,粉尘、油污、凝露易造成码盘污染失效;
结构复杂:码盘 + 发光接收组件 + 精密机械固定支架,零件多、装配公差要求高;
维护成本高:高速往复运动、长期震动环境下易磨损、老化,生命周期短;
绝对式方案昂贵:多圈光电绝对编码器成本高、体积大,限制中小功率伺服普及。
1.2 纳芯微磁编码器伺服核心优势
纳芯微 AMR/TMR 磁编码器针对工业伺服场景定制优化,形成差异化竞争力:
极简双部件架构:编码器单芯片 + 微型永磁体,无光学器件、无精密机械结构;
全工况强鲁棒性:非接触磁场检测,耐油污、粉尘、震动、高低温,-40℃~125℃宽温稳定工作;
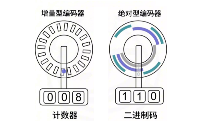
纯绝对式输出:上电无需回零,360° 全范围实时角度,无累计误差,适配伺服断电记忆、原点保持;
高动态响应:片上硬件解算,微秒级延迟,支持超高转速伺服闭环控制;
深度误差补偿:出厂标定 + 用户在线自校准 + 温漂动态修正,满足伺服高精度位置控制需求。
2 面向伺服的极简系统架构:单芯片 + 永磁体
2.1 整体拓扑组成
整套伺服角度检测系统仅由两大核心部件构成,彻底简化伺服电机后端盖结构设计:
磁编码器单芯片
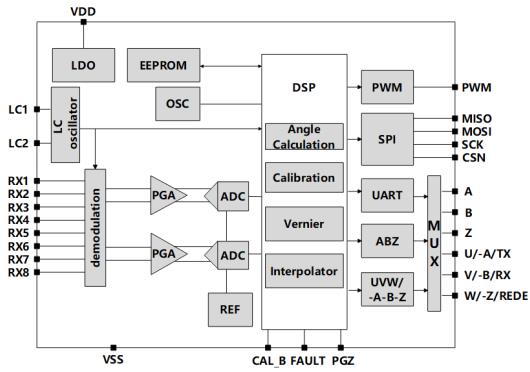
集成正交磁敏电桥、低噪声模拟前端 AFE、高速同步 ADC、硬件 CORDIC 角度解算引擎、OTP/MTP 存储、多路工业标准接口与保护电路,无需任何外围调理放大、滤波、运放电路,单颗芯片完成磁场采集到角度数字输出全流程。
单对极永磁体
采用钕铁硼高磁能积材料,径向一对极均匀充磁,刚性固定于伺服电机转轴末端,随转子同步旋转,提供稳定平面旋转磁场。
工作机理:电机转轴带动永磁体旋转→空间磁场方向连续变化→芯片内部正交 AMR/TMR 电桥感应磁场角度变化→输出正交 SIN/COS 差分信号→片上处理解算为实时机械角度,直接给到伺服驱动 MCU 完成位置闭环。
2.2 单芯片内部功能分层架构
为匹配伺服高速、高精度、强干扰环境,纳芯微采用传感层→模拟信号链→数字运算层→接口驱动层全集成架构:
磁敏传感层
芯片内置两组空间 90° 正交排布的 AMR/TMR 惠斯通电桥,利用磁阻效应将磁场角度线性转化为差分电压信号,TMR 架构具备超高压阻变化率、低温漂、高信噪比,适配高端伺服;AMR 方案兼顾性能与成本,覆盖通用伺服场景。
高精度模拟前端 AFE
集成可编程增益 PGA、斩波稳零电路、二阶抗混叠滤波、共模抑制单元,针对伺服大电流动力线 EMI 干扰做优化,抑制低频失调、1/f 噪声与共模干扰,保证微弱磁信号完整采集。
高速数字化与解算层
搭载高位数同步 SAR ADC,两路正交信号同步采样,杜绝相位时差误差;内置硬件 CORDIC 运算加速器,以纯硬件逻辑完成反正切角度解算,纳秒~微秒级超低延迟,满足伺服电流环、速度环高实时性要求。
校准存储与补偿运算层
非易失性存储单元固化出厂校准参数,同时支持用户现场自校准参数写入,实时完成偏心、正交、温漂、非线性误差的动态修正。
工业级接口层
集成 SPI 高速绝对角度接口、ABZ 差分增量信号、UVW 电机换相、PWM 模拟输出,无缝兼容主流伺服驱动芯片、运动控制 MCU,兼顾绝对位置与增量测速双重需求。
2.3 极简架构带来的伺服工程价值
电机结构小型化:省去编码器复杂支架、遮光罩、光学组件,缩减电机尾部体积;
装配公差宽容:磁钢与芯片气隙 0.5~3mm 可适配,同心度、倾斜装配误差可通过算法补偿;
BOM 极简化:外围仅需滤波电容,降低伺服驱动板布线难度与器件故障率;
降本增效:零件数量减少 70% 以上,批量生产装配效率大幅提升。
3 正交磁敏检测与角度解算核心原理
3.1 正交磁桥信号生成
伺服电机旋转过程中,永磁体形成的平面磁场角度 θ 连续变化,两组正交磁敏电桥输出严格正交的差分模拟信号:
( begin{cases} V_{sin} = V_{amp} cdot sintheta \ V_{cos} = V_{amp} cdot costheta end{cases} )
AMR 电桥输出 mV 级差分信号,依靠片上高增益 AFE 放大调理;TMR 电桥凭借隧道磁阻效应,信号幅值大幅提升、信噪比显著提升,大幅降低后端采样压力,更适合高速伺服强干扰环境。
3.2 全硬件高速角度解算
区别于传统软件查表、迭代解算方案,纳芯微采用硬件 CORDIC 坐标旋转算法:
同步采集 SIN/COS 数字化数值;
通过移位、加减逻辑硬件迭代,快速完成(theta=arctan(Sin/Cos))运算;
实时输出 0~360° 连续绝对角度,无角度突变、无分区盲区。
该架构无软件运算延迟,满足工业伺服上万转高速运行下的位置实时反馈,避免高速闭环滞后导致的震荡、失步问题。
4 伺服工况下主要误差来源与分级补偿技术
工业伺服对角度精度、转速稳定性要求严苛,磁编码器原生存在机械安装误差、器件固有误差、环境温漂误差三大类干扰,纳芯微通过出厂标定 + 在线自校准 + 动态温度补偿三级体系实现全维度误差抑制。
4.1 主要误差来源
机械安装误差
伺服装配过程中磁钢与转轴偏心、端面倾斜、气隙不均匀,是工业场景最大误差源,会引入周期谐波误差,导致转速波动、低速抖动;
器件固有误差
磁敏电桥幅值不平衡、零点偏移、正交相位偏差、磁阻非线性,造成基础角度偏差;
环境工况误差
伺服电机长时间运行发热,环境温度大范围变化,引发磁桥电阻温漂、磁钢磁性能衰减,产生温漂误差;
电气干扰误差
伺服大功率驱动板 MOS 高频开关、动力线缆辐射干扰,耦合至模拟信号链,引入噪声误差。
4.2 第一级:出厂原厂精准标定
芯片出厂阶段完成全参数多点标定,固化基础补偿参数至 OTP:
零点偏移补偿:消除电桥静态失调电压;
幅值平衡校准:修正 SIN/COS 信号幅值不一致问题;
正交误差修正:补偿物理排布带来的相位非 90° 偏差;
非线性分段校准:降低磁阻特性非线性带来的谐波误差。
出厂标定后,芯片原生基础角度误差控制在较低水平,满足通用伺服基础使用。
4.3 第二级:用户现场一键在线自校准
针对伺服整机装配后的偏心、倾斜、磁钢个体差异等机械误差,纳芯微磁编码器集成伺服专用自校准功能:
伺服电机匀速低速旋转若干圈,芯片自动全域采集 360° 全角度磁场数据;
自动分析周期误差分量,计算偏心补偿系数、谐波修正参数;
自动写入片上 MTP 存储,掉电永久保存,无需重复校准。
经过现场自校准后,机械装配带来的周期性误差可抑制 80% 以上,大幅改善伺服低速平稳性与定位重复精度。
4.4 第三级:实时动态温度与工况补偿
芯片内置高精度片上温度传感器,实时采集芯片结温,结合多点温漂标定系数:
动态修正磁桥电阻温度系数、AFE 增益温漂;
自适应补偿高温下磁钢退磁导致的信号幅值衰减;
配合数字滤波算法,抑制伺服强 EMI 环境下的随机噪声。
宽温全域内,实现 - 40℃~125℃角度误差稳定可控,保障伺服长期连续运行可靠性。
5 工业伺服工程化设计关键要点
5.1 磁钢与芯片安装设计
磁钢选型:选用高耐温钕铁硼材质,适配伺服高温环境,单对极径向充磁;
气隙控制:推荐安装气隙 1~2mm,兼顾信号强度与装配容错;
同心度控制:机械端预留简易调心结构,配合芯片自校准,放宽加工公差。
5.2 伺服驱动板硬件布局优化
强弱电分区:编码器信号走线远离三相动力线、MOS 功率回路,减少开关干扰;
电源纯净设计:3.3V 供电引脚就近放置 0.1μF+1μF 滤波电容,降低电源纹波;
差分信号防护:ABZ 增量信号采用差分走线与阻抗匹配,提升长距离抗干扰能力;
单点接地:模拟地与数字地单点共地,杜绝地环路噪声。
5.3 伺服控制算法适配
利用绝对角度上电快速归位,简化伺服控制逻辑,取消外部原点传感器;
依托高分辨率角度数据,优化低速电流环补偿,抑制伺服低速爬行与抖动;
结合编码器实时温度、故障状态信号,实现伺服系统全链路故障诊断。
6 总结
面向工业伺服领域的纳芯微磁编码器,以单芯片 + 永磁体的极简硬件架构,重构了伺服位置反馈方案形态。依托 AMR/TMR 正交磁敏电桥核心传感、片上全集成信号链与硬件高速角度解算,配合出厂标定、现场自校准、动态温漂补偿三级误差抑制体系,有效解决伺服装配误差、器件误差、环境干扰等核心问题。
相比传统光电编码器,该方案具备抗振耐污、结构精简、装配简单、宽温高可靠、绝对位置输出等突出优势,完全适配中小功率伺服、减速机、自动化执行机构等高端运动控制场景,成为工业伺服国产化替代、设备小型化与高可靠升级的核心传感解决方案。
审核编辑 黄宇
-
磁编码器
+关注
关注
0文章
142浏览量
6688 -
纳芯微
+关注
关注
3文章
445浏览量
16231
发布评论请先 登录
MT6825 18 位绝对式磁编码器:正交 AMR 电桥与角度解算机制
基于单芯片架构的纳芯微磁编码器: 技术路线对比与电机适配
纳芯微 AMR/TMR 磁编码器:单芯片绝对角度检测核心技术与信号链
纳芯微磁编码器全角度误差建模与自适应校准
从 ±1° 到 ±0.01°:纳芯微霍尔/AMR/TMR 磁编码器精度体系解析
纳芯微磁编码器:磁电转换与高精度角度解析原理深度解析
绝对式旋转编码器常用什么类型磁铁?

纳芯微推出MT6901双码道游标算法电感编码器芯片

纳芯微传感新品:MT6901电感编码器深度解析
纳芯微传感新品:MT6901电感编码器深度解析



评论