 荣耀机器人散热系统介绍
荣耀机器人散热系统介绍

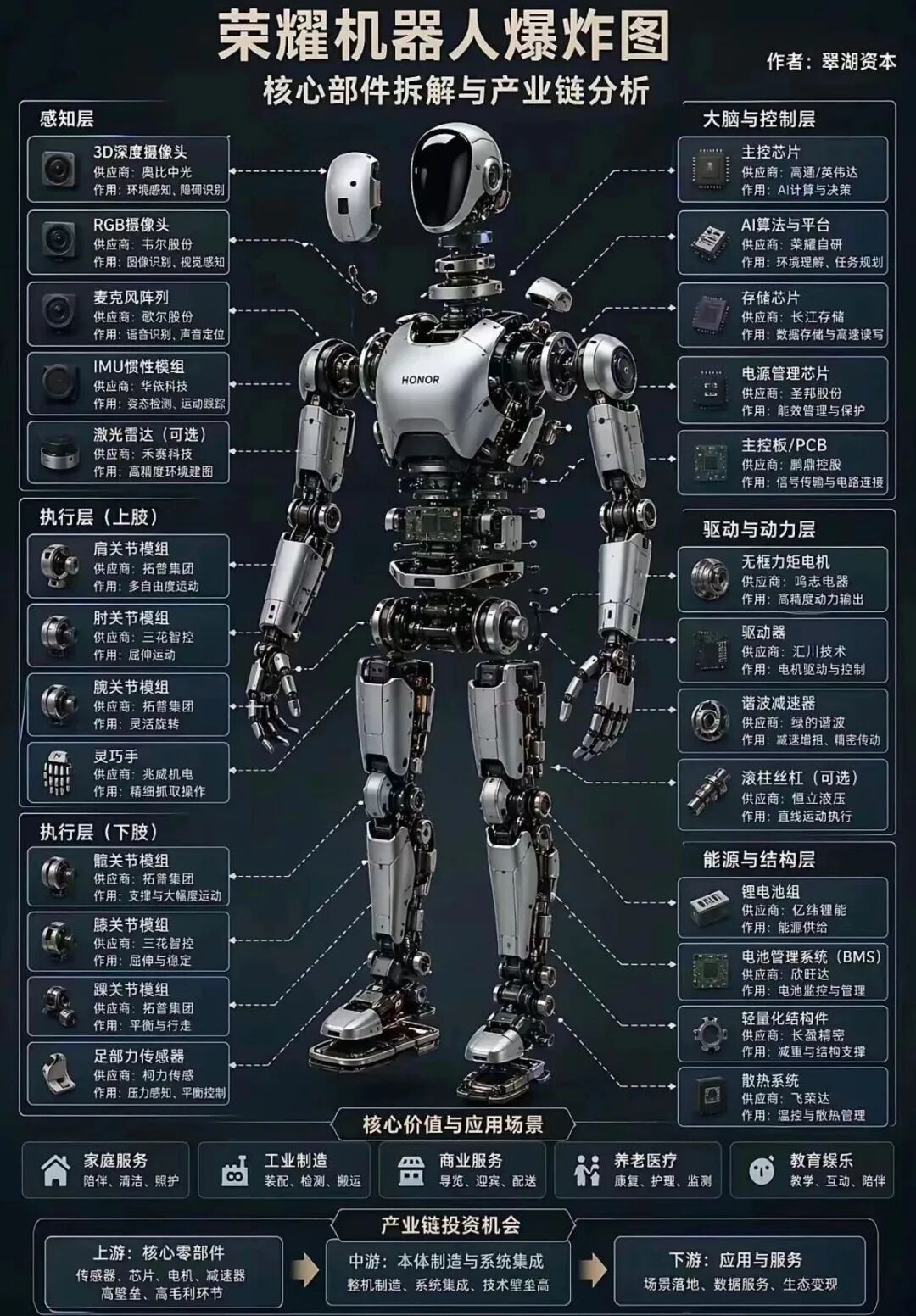
荣耀机器人爆炸图(来自翠湖资本)这张荣耀机器人爆炸图中,散热系统被单独标注在 “能源与结构层”,供应商指向飞荣达。结合人形机器人的技术原理与马拉松赛事的散热痛点,我为你深度拆解这个看似微小、实则决定机器人生死的核心系统。
一、 散热系统在机器人中的核心定位
在机器人的物理结构中,散热系统并非独立部件,而是一个集成式的热管理网络,它与动力层、能源层深度绑定:
位置布局:主要集成在背部 “背包” 区域(对应液冷散热器与风机)、关节内部腔体(对应液冷管路与导热介质)以及机身骨架(对应导热结构件)。
功能属性:它是机器人的 “空调系统”,负责将电机、芯片、电池产生的废热高效排出,保障机器人在高负载下持续、稳定、安全运行。
二、 核心技术构成:从单一散热到 “液冷 + 结构 + 材料” 的复合方案
从爆炸图及行业技术迭代来看,荣耀机器人的散热系统由四大核心模块构成:
1. 核心散热介质与材料(飞荣达等供应商提供)
导热界面材料:采用高导热石墨片、液态金属、石墨烯导热垫片等材料。这些材料被填充在电机定子、减速器外壳与机身骨架之间,解决了 “热传导阻力” 问题,能将关节内部热量快速导出至外部散热结构,导热系数是传统铝合金的 5-10 倍。
定制化冷却液:在液冷方案中,使用高比热容、低粘度的乙二醇水溶液或氟化液,直接在关节内部循环吸热。
2. 微型液冷循环系统(核心技术壁垒)
这是解决马拉松级长距离运行散热的关键方案:
微型液泵:集成在背部背包中,尺寸仅硬币大小,提供稳定的循环动力,解决了 “小空间内实现大流量循环” 的工程难题。
微流道管路:在关节电机绕组内部设计微型液冷流道,并非简单贴在外壳,而是直接嵌入热源核心,实现 “零距离热交换”。
集成式散热器:背部背包采用液冷板 + 风冷鳍片的复合结构,冷却液在此处将热量释放给散热器,再由风机加速散热。
3. 轻量化结构散热(长盈精密等供应商提供)
高导热结构件:机身骨架、关节外壳采用铝合金、镁合金或碳纤维复合材料,这些材料本身具备良好的导热性能,在承担支撑、连接功能的同时,充当 “天然散热器”。
仿生气流设计:参考人体皮肤的汗腺分布,在机身表面设计隐藏式散热孔道,利用机器人奔跑时的迎面风辅助散热。
4. 智能热管理控制(大脑与控制层协同)
温度传感器网络:机身部署数十个温度传感器,实时采集关节、管路、芯片的温度数据。
动态调控算法:根据运动状态(如跑步、爬坡、静止),智能调节液泵转速、风机风量,在 “散热效果” 与 “能耗” 之间找到最优平衡,避免因过度散热导致续航下降。
三、 与传统散热方案的本质差距
| 对比维度 | 传统散热方案(风冷为主) | 荣耀机器人复合散热方案 | 差距带来的影响 |
|---|---|---|---|
散热效率 | 空气导热系数低,散热速度慢,高负载下 5-10 分钟即过热 | 液冷换热效率是风冷的 10-50 倍,可支持 2 小时以上连续运行 | 决定机器人能否完成长距离任务,是商业化的核心门槛 |
集成度 | 散热片、风扇体积大,占用空间,影响运动灵活性 | 微型化、嵌入式设计,几乎不占用额外空间,不影响步态 | 保障机器人的紧凑性与运动自由度 |
稳定性 | 高温下效率骤降,易导致电机退磁、芯片死机 | 全工况稳定控温,将核心温度维持在安全阈值内(30-40℃) | 延长机器人寿命,避免因高温导致的硬件不可逆损坏 |
四、 落地应用与商业价值
场景适配:
工业场景:满足机器人 24 小时连续作业的需求,避免因过热停机导致产线中断。
家庭 / 服务场景:支撑机器人长时间陪伴、巡检,提升用户体验。
特种场景:在高温、极端环境下,保障机器人的生存能力。
技术壁垒:
散热系统的研发涉及材料科学、流体力学、机械设计、智能控制等多学科交叉,是衡量机器人企业技术实力的核心指标。
飞荣达等供应商的角色,体现了 “硬件 + 材料 + 方案” 的深度合作模式,是国产供应链高端化的典型代表。
总结
荣耀机器人爆炸图中的 “散热系统”,看似是一个基础部件,实则是人形机器人从 “实验室演示” 走向 “商业化落地” 的关键支撑。它通过复合散热技术,解决了机器人高负载运行的 “发热痛点”,为其在工业、家庭、医疗等多场景的规模化应用奠定了基础。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31444浏览量
223662 -
散热系统
+关注
关注
0文章
75浏览量
10834 -
荣耀
+关注
关注
6文章
2024浏览量
44305
发布评论请先 登录
相关推荐
热点推荐
荣耀“闪电”机器人夺冠续航翻倍的秘密?格瑞普深度解读人形机器人电池定制
。当荣耀齐天大圣队的自主导航机器人“闪电”以50分26秒(净用时)率先冲线,所有人都意识到:人形机器人的奔跑能力,已经超出了多数人的预期。一、荣耀“闪电”凭什么夺冠

机器人热管理技术体系与方案
机器人热管理技术直接决定机器人的工作范围、可靠性与使用寿命,是机器人向高功率、轻量化、极端环境适配方向发展的核心支撑……热管理系统作为机器人

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
科技:《武 BOT》:H2人形机器人31个高精度关节、单臂7自由度,完成醉拳、双截棍、舞剑,同步误差**< 0.1秒;核心是高功率密度伺服电机+高速控制+**强散热。
**魔法原子:《智造
发表于 02-17 14:07
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
模拟输入数据自动调整整个系统的动态平衡,使得机器人最终能够快速且平滑地沿着黑线移动。除此之外,该项目最大的亮点是我根据GD32VF103处理器的库函数手册等相关资料为RV-STAR开发板封装了一个类
发表于 10-20 10:39
MEMS风扇:让机器人告别“龟速”与“追跑”,散热革命引爆赛场新速度!
机器人大赛中所暴露的“人追机器人”现象,本质上是高功率机器人系统对散热技术革新的迫切呐喊。而ME

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
支撑机器人竞技能力的核心力量,深刻改变着竞技机器人的能力边界。
磁传感器芯片为机器人运动提供 “精准导航”。在动态平衡系统中,像昆泰芯 KTH71 系列磁传感器芯片,通过检测地磁场与
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
系统,开发了一套二轮差速驱动转向移动机器人电机驱动系统,完成了系统各部件的整体装配和调试。试验结果表明,该设计方案可行、系统运行稳定可靠、成
发表于 06-11 14:30
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
:
一、机器人视觉:从理论到实践
第7章详细介绍了ROS2在机器视觉领域的应用,涵盖了相机标定、OpenCV集成、视觉巡线、二维码识别以及深度学习目标检测等内容。通过学习,我认识到:
相机标定的重要性
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
规划:导航是机器人自主运行的关键功能。书中详细介绍了基于 ROS 2 的导航系统,包括地图创建、路径规划和导航控制等环节。首先,通过激光雷达等传感器获取环境信息,使用 SLAM(Simultaneous
发表于 04-27 11:24



评论