 剑桥大学:研发多尺度结构微型三维力传感器—突破“尺寸-灵敏度-维度”瓶颈,实现微型化高灵敏多维力感
剑桥大学:研发多尺度结构微型三维力传感器—突破“尺寸-灵敏度-维度”瓶颈,实现微型化高灵敏多维力感

近年来,各种触觉传感器被开发出来,以复制指尖的三维(3D)触觉感知。这些传感器采用不同的机制来解耦法向力和剪切力,包括电阻变化、电容变化、输出电压、磁场、气压或光信号。然而,光电或机械解耦的三轴力传感器所需的复杂且笨重的结构,阻碍了它们在典型机器人手臂或假肢中的集成。用于检测滑动或表面纹理的各种传感方案在识别力的方向方面也面临挑战。尽管采用多层压阻材料和图案化电极的传感器在技术上取得了一定进展,但许多仍然难以准确识别切向力的方向,或仅限于在固定方向上进行测量。在一些集成电极阵列的传感器中,其在法向和剪切载荷下的变形会在电极上产生不同的输出信号,从而通过数学解耦模型计算三轴力。然而,这些概念验证演示装置体积较大,线性度差,灵敏度低或测量范围窄,使其不适合在微操控器等需要小型化的应用场景中使用。复制高分辨率的多维触觉,甚至接近人类手指的触觉,仍然是一项艰巨的挑战
鉴于此,剑桥大学Tawfique Hasan & Guolin Yun 团队,在"Nature Materials"期刊上发表了题为“Multiscale-structured miniaturized 3D force sensors”的最新论文。作者提出了一种基于石墨烯协同各向异性多孔导电弹性体(APEs)的多尺度结构力传感器阵列,以应对这些挑战。作者的复合材料结合了一种混合填料,该填料由尖锐的镍(Ni)颗粒、少层石墨烯(FLG)纳米片和液态金属(LM)微滴组成,形成了一种固-液混合导电网络,其中液态金属微滴作为可变形的中心,FLG纳米片作为桥梁。这里使用的液态金属指的是共晶镓-铟(EGaIn),它结合了液体的可变形性和金属的高导电性。通过在制备过程中引入孔形成剂并在磁场下固化,该复合材料结合了互连的微孔结构和各向异性的填料网络,从而实现了沿对齐方向的高力敏感性。作者进一步模仿人类表皮的结构,创建了具有单个传感单元的金字塔传感器阵列,单元尺寸小至200微米。金字塔结构的使用使得实现极高的线性灵敏度和广泛的检测范围成为可能。集成到机器人抓手中,作者展示了对力的大小和方向、滑移及粗糙度的高精度实时感知,提供了对触觉设备(如假肢和微操纵器)的关键能力,从而推动了机器人在不可预测或未知环境中的灵活性。
【文章亮点】
结构设计:石墨烯-液态金属复合材料制金字塔微阵列(单元200μm),多尺度解耦法向/切向力。
性能突破:500kPa内灵敏度110 kPa⁻¹(R²>0.998),方向偏差<2°,检测限0.9μN。
应用验证:机械臂夹爪自适应抓取未知物,精准检测滑动调力。
【图文解读】

图1 | APE传感器的多尺度结构。a,示意图展示了APE的三维组成和微观结构。b,APE样品截面的扫描电子显微镜(SEM)及能量色散谱(EDS)图像。镍(Ni)、氟掺杂石墨烯(FLG)纳米片、液态金属(LM)液滴和聚二甲基硅氧烷(PDMS)的分布分别由其特征元素Ni、C、Ga和Si表示。EDS图像显示了排列整齐的镍颗粒链。c,示意图展示了带有金字塔表面结构的APE三维力传感阵列,安装在机器手上。

图2 | APE的电气和机械性能。a,b,APE在与对齐方向平行(0°)和垂直(90°)的压缩应变曲线的导电性-压缩应变曲线(a)和应力-压缩应变曲线(b)。插图:基于各向异性填料网络定义的0°和90°方向。c,APE和ANPE沿0°方向的导电性-压力曲线。d,示意图说明APE在不同方向压缩时导电性变化的原理。e,有限元模拟比较在513 kPa压力下APE(左)和ANPE(右)的变形和应力分布。f,有限元模拟比较在80 kPa压力下APE(左)和ANPE(右)的导电性。更大的电位降(红色)对应于更高的电阻率。g,电流密度模拟显示在压力下APE中的导电路径。h,模拟不同压力下APE和ANPE的导电性。

图3 | APE金字塔传感器单元。a,模拟金字塔传感器单元在垂直压力下的纵向截面变形和应力分布。b,c,曲线显示在0–30 kPa (b) 和0–500 kPa (c)压力范围内,APE传感器单元的导电率相对变化(ΔG/G0)与压力的关系。d,模拟传感单元在斜力作用下的纵向截面变形和应力分布。a,b,与传感器几何形状和电极位置相关的常数系数;R1,R2,分别为在传感器单元底部电极上测得的电阻。e,f,模拟APE传感器单元在法向力(e)和剪切力(f)作用下的底部压力分布。g,h,曲线显示由APE传感器单元底部的4个电极(U1–U4)测得的电位相对变化(ΔU/U0)与压力的关系,在0–1.3 kPa (g) 和0–55 kPa (h)压力范围内。g中的插图展示了传感器单元的示意图;h中的插图展示了红框所框出的数据的扩展。Vcc,为公共集电极上的电压。i,轮廓图展示了传感器单元底部第一个电极(U1)测得的电位在12,000个0–1.6 kPa加载周期中的时间变化。插图:前20个周期的曲线(左)和周期10,001–10,020的曲线(右)。

图4 | APE传感器单元的三维力感测。a,斜向力在球坐标系中的分解(左)以及传感器单元底部四个电极上的不同压力分布(右)。b,在恒定力大小下,不同力方向下底部电极的模拟相对电势。c,当剪切力方向固定在20°时,四个底部电极的相对电势与φ曲线的模拟与实验结果比较。数据以平均值±标准差表示,来源于n=5个不同传感器。d,示意图显示APE传感器单元的斜向力测试装置。e,当力方向固定在φ=18°和θ=40°时,传感器四个电极的相对电势变化与力的曲线。插图:电极的位置。f,g,传感器针对不同施加力和力角度测得的力(f)和角度(g)比较。数据以平均值±标准差表示,来源于n=5个不同测试。f中的绿色阴影区域相当于x=y线,以显示测得的力与施加的力之间的偏差。h,示意图显示传感器单元在粗糙表面上的滑动。i,传感器单元在砂纸上滑动时第一个电极的电势-时间曲线。j,传感器在不同基材上滑动时电压的瞬时变化及随后的波动。

图5 | APE传感器阵列的演示。a,示意图显示了焊接在PCB上的APE力传感器阵列。b,示意图说明了与APE传感器阵列集成的操控器抓取纸管的过程。c,传感器在抓取纸管时检测到的法向力和切向力随时间变化的曲线(分别为FN–t和FS–t)。右侧的照片展示了纸管在被夹持(t1)和提升(t2)时的状态。插图:法向力FN和切向力FS的定义。d,示意图显示操控器抓取钢块的过程。e,传感器阵列在转移钢块时检测到的法向力和切向力随时间变化的曲线(底部)以及力方向随时间变化的曲线(φ–t,顶部)。f,钢块滑动(t1)、夹持(t2)和放置在地面(t3)时的照片及测量到的力。g,APE微传感器阵列的照片(左)及扫描电子显微镜(SEM)图像(中和右)。SEM图像中的白色区域是由于PDMS基体上的电荷所致。h,示意图显示了粘附在带有图案电极的玻璃晶片上的APE微传感器阵列(左)以及与金属球接触的四个微传感器单元底部的测量压力分布(右)。i–k,测量到的不同直径(D)金球和铟球产生的平均法向力(i)、力方向(j)和剪切力方向(k)。数据以均值±标准差(n=5,来源于不同的传感器阵列)呈现。插图:法向力FN和球坐标中力方向角φ和θ的定义。
【结论与展望】
柔性触觉传感器在推动神经假肢、人机交互和智能机器人技术方面具有重要意义。然而,实现高度敏感的触觉感知以区分法向力和切向力,尤其是在模拟人类手指的高分辨率多维触觉方面,仍然面临挑战。作者开发了一种基于石墨烯协同各向异性多孔复合材料的三维力传感器阵列,结合了力解耦的多尺度结构,实现了力的大小与方向的精确测量,同时具备滑动检测与表面粗糙度估计功能。通过创新性地采用金字塔结构,作者的方法在500 kPa线性范围内展现出110 kPa⁻¹的高灵敏度,力方向偏差测量误差小于2°,检测极限达到0.9 μN,且传感单元边长最小可达200 μm,性能较现有技术提升了一个数量级。该传感器的卓越性能使机器人手臂能够自适应抓取未知尺寸和重量的物体,推动了类人触觉感知的实现进程。此外,将传感单元尺寸微缩至50 μm以下的潜力为实现更高空间分辨率提供了广阔前景,促进了微操纵器和微型机器人的复杂任务执行。随着空间分辨率和重复性的进一步提升,以及温湿度传感功能的集成,该传感器有望在假肢制造和灵巧机器人等领域展现出优异的应用性能。
【参考文献】
Yun, G.et al.Multiscale-structured miniaturized 3D force sensors.Nat. Mater.(2026) doi:10.1038/s41563-026-02508-7
来源:新一代柔性传感
审核编辑 黄宇
-
力传感器
+关注
关注
0文章
169浏览量
15964 -
触觉传感器
+关注
关注
4文章
130浏览量
10446
发布评论请先 登录
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
北京大学长三角光电科学研究院、清华大学:研发WGM光学微腔探针,实现高灵敏磁场传感与成像新突破

华南理工大学:超灵敏橡胶传感器,突破柔性传感“不可能三角”

SMT工艺革新:高精度贴装与微型化组装的未来趋势
北大团队实现超高灵敏短波红外探测新突破

【新品发布】让AIoT设备更轻薄!艾为推出高灵敏度、超小尺寸电容触控SoC

三环贴片电容的微型化封装是否会影响其性能?
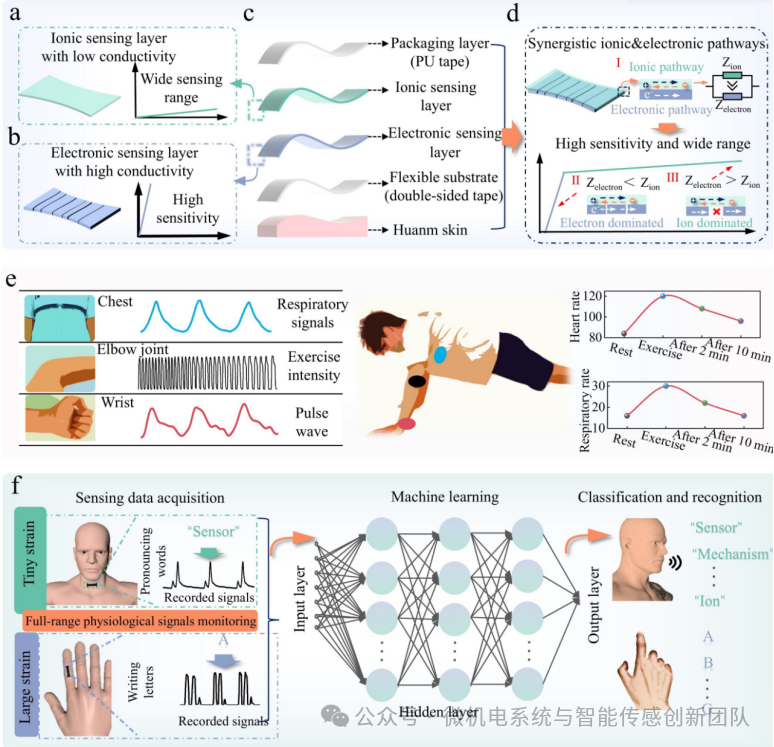
四川大学:协同离子-电子传输应变传感器实现宽工作范围内超高且可调灵敏度
多种类几何尺寸集成智能仪器定制 一站式解决产线多维度测量需求
精于微·智于芯:盛思锐微型化传感器亮相SENSOR CHINA 2025

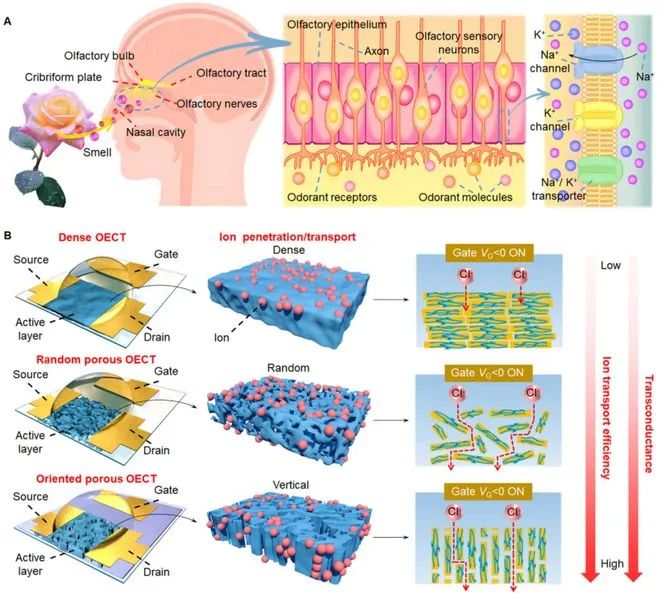
同济大学:仿生纳米通道气凝胶晶体管,突破生物传感灵敏度极限
瑞之辰压力传感器:小尺寸大突破,实现微型化转型



评论