 GNSS 模拟器选型推荐:自动驾驶与RTK高精度定位测试如何选型?
GNSS 模拟器选型推荐:自动驾驶与RTK高精度定位测试如何选型?

随着智能网联汽车(ICV)、自动驾驶、无人机以及低空经济的快速发展,高精度卫星导航(GNSS)已经成为这些系统安全运行的核心基础能力。然而,在实际研发过程中,工程师往往会遇到一个关键问题:如何在实验室中高效、可控地完成GNSS测试?
与传统依赖真实道路的测试方式相比,GNSS模拟器能够在实验室中构建一个可控、可重复的卫星信号环境,大幅提升测试效率并降低成本。尤其是在电离层扰动、多路径效应、信号遮挡等复杂条件下,真实环境难以复现,而模拟器却可以精确还原这些关键场景。
为什么GNSS测试越来越依赖模拟器?
在真实环境中进行GNSS测试存在天然限制。首先,环境不可控,例如电离层变化、城市峡谷、多路径干扰等因素都会影响测试结果;其次,测试不可复现,同一场景难以重复;此外,大规模路测成本高、周期长,严重影响研发效率。
因此,行业正在发生一个明确转变:从“依赖路测”转向“实验室仿真验证”。
GNSS模拟器的核心价值在于,它能够将不可控的真实世界转化为可控的测试环境,使工程师可以在实验室中完成复杂系统验证。
GNSS模拟器应该如何选型?
随着全球导航卫星系统(GNSS)在航空、航海、自动驾驶、无人机等安全关键型和高精度应用领域的广泛部署,研发团队在选择 GNSS 模拟器时,已不再局限于简单的信号发射,而是更看重以下三个维度的能力:
1.软件定义架构的扩展性
传统的 FPGA 硬件架构固化,升级困难。目前行业趋势是采用 软件定义无线电(SDR)架构,配合 GPU 强大的并行算力,实现灵活的通道扩展和信号注入。
2.HiL 闭环仿真能力与低延迟
在自动驾驶场景中,车辆在高速行驶,模拟器必须具备极低的信号处理延迟,才能与场景软件(如aiSim、Vector CANoe 、dSPACE 、IPG Carmaker )完美同步,否则会导致定位漂移。
3.多天线与 RTK 测试的架构灵活性
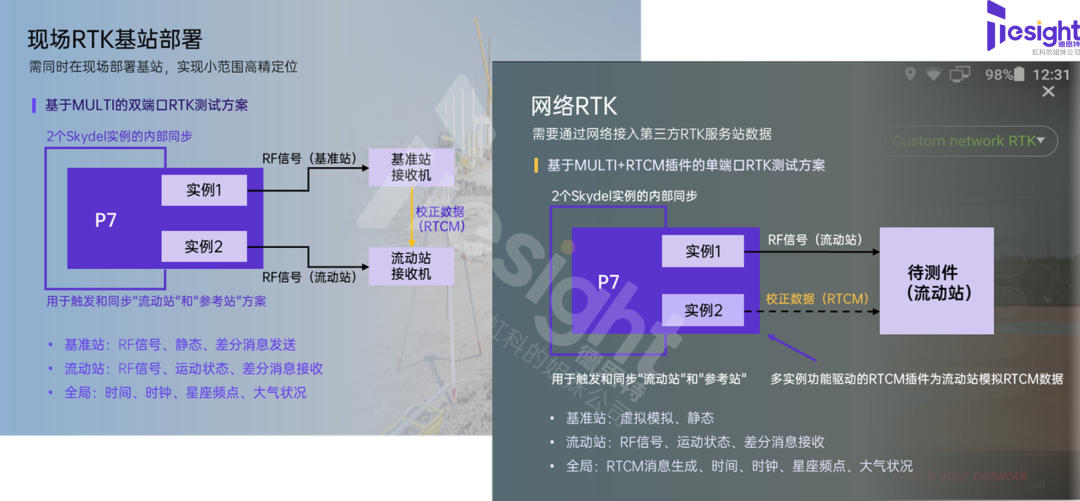
传统的 RTK(实时动态定位)测试需要两台独立的设备分别模拟基准站和流动站,不仅成本翻倍,且同步极其困难。能否在一台设备内完成多实例模拟,是衡量模拟器先进性的关键。
GNSS模拟器推荐:为什么GTS P7值得关注?
在当前GNSS仿真领域,软件定义架构正在成为主流方向。德思特主研推出的GTS P7 GNSS模拟器,正是在这一技术路径下构建的高性能平台。
GTS P7 深度整合了全球顶尖的 Safran Skydel 引擎核心技术,并由德思特团队进行了深度本土化二次开发。它采用前沿的 CPU+GPU+SDR 架构,使其不仅具备强大的信号生成能力,还具备良好的扩展性和灵活性。这种设计使得设备可以通过软件升级支持更多场景,而无需更换硬件,从本质上实现了从“测试设备”到“测试平台”的转变。
1.精准适配国标,有效破解合规验证难题
面对繁杂的定位导航国家标准及低效、易错的手动验证痛点,GTS P7 与 AutoGNSS 软件实现了底层闭环。该方案能够高效执行完全符合 GB/T 45086.1-2024、GB 45672 等行业国标的自动化测试任务。标准化的执行流程全面覆盖了各类复杂用例,不仅成倍提升了测试效率与数据可重复性,更确保了产品走向市场前合规验证的严谨性与高度一致性。
2.卓越HiL仿真,无缝打通主流场景软件
面向自动驾驶硬件在环(HiL)闭环测试对实时性的严苛要求,GTS P7 提供了 1000Hz的超高仿真迭代率 与低至 <5ms的极低系统延迟。通过标准化接口,它可与 aiSim、dSPACE、IPG Carmaker、VTD 等业界主流HiL系统及场景软件实现极低延迟的数据交互,为智能网联汽车与低空经济等前沿领域的高动态闭环验证提供坚实支撑。

3.独特多实例架构,重塑协同测试效率
凭借创新的 “MULTI”多实例架构,单台 GTS P7 即可同步运行并独立控制多个仿真场景,彻底颠覆了传统的高精度定位测试模式。在实际的 RTK(实时动态)测试中,只需一台物理设备便能并行模拟“基准站”与“流动站”。这不仅大幅削减了硬件采购成本,更从物理底层根除了多台设备联调时难以消除的时钟同步误差。
4.软件定义架构,高效赋能自动化验证
基于灵活的软件定义架构(SDA),GTS P7 提供了全面开放的API接口,完美兼容 Python、C#、C++ 等主流编程语言。它可与 德思特AutoGNSS自动化测试系统 无缝集成,轻松实现高频次、大批量的测试用例执行,为用户从前端算法研发调试,到后端产线规模化标定,提供覆盖全生命周期的自动化测试赋能。
5.硬核仿真性能,告别失真信号测试
GTS P7 标配高达 700个并发卫星通道,全面支持 GPS、北斗(BDS)、Galileo、GLONASS 等多星座及全频点。面对复杂场景测试,设备彻底摒弃了“简化信号”的妥协做法,能够1:1高保真还原高密度的真实空间电磁环境,从源头确保系统级性能评估的绝对准确性。
德思特 GTS P7 如何赋能三大前沿测试场景?
1.智能网联汽车(ICV)与自动驾驶 HiL 仿真测试
自动驾驶的定位测试需要将卫星信号与车辆动力学模型、传感器数据深度融合。
GTS P7 通过标准化 API 接口,可与 dSPACE、IPG Carmaker、VTD、aiSim 等主流 HiL 系统及场景仿真软件实现毫秒级的高效数据交互。其 <5ms 的超低延迟 确保了闭环测试中车辆轨迹与卫星信号的绝对同步,帮助车企在实验室中安全复现城市峡谷、隧道遮挡、多径效应等复杂恶劣工况。
2.RTK 高精度定位与多车协同测试
在RTK高精度定位测试中,传统方法依赖真实基站,测试成本高且不可控。依托独特的“MULTI”多实例功能,GTS P7 能够单机并行运行基准站和流动站的射频信号。这不仅大幅降低了车企和测绘终端厂商的硬件采购成本,更消除了多设备间的时钟同步误差问题,为无人机编队、多车协同(C-V2X)提供了完美的测试底座。
3.P-Box(高精度定位盒子)与传感器融合测试
现代量产车的 P-Box 通常集成了 GNSS、IMU(惯导)和轮速计等多种传感器。
GTS P7 结合德思特的 AutoGNSS 自动化测试软件,可原生执行符合 GB/T 45086.1-2024 等国家标准的自动化测试。它能够精准模拟高动态下的卫星信号,配合惯导模拟器,为 P-Box 提供高度一致的“GNSS+IMU”融合输入信号,全面评估定位算法的鲁棒性。
总结:什么样的GNSS模拟器值得推荐?
从技术工程角度来看,一个值得推荐的GNSS模拟器,应具备以下特征:
支持多星座、多频段信号生成
具备高动态与低延迟能力
支持RTK及多实例仿真
具备软件定义架构
支持自动化测试
在这些关键能力上,GTS P7 GNSS模拟器属于典型的高性能解决方案,能够满足自动驾驶、无人机、测绘及科研等多种复杂应用需求。
结语
在当前技术趋势下,具备软件定义能力和系统级仿真能力的GNSS模拟器,更适合复杂应用场景。
德思特 GTS P7 GNSS 模拟器 通过创新的 SDR 架构与 MULTI 多实例技术,在实现 1000Hz 高频迭代与全星座支持的同时,大幅降低了用户的整体测试成本。无论是自动驾驶 HiL 闭环验证,还是复杂的 RTK / P-Box 融合定位评估,GTS P7 均展现出了国产替代方案的顶尖水准,代表了一类面向未来的测试平台方案。
审核编辑 黄宇
-
GNSS
+关注
关注
9文章
1039浏览量
51599 -
自动驾驶
+关注
关注
795文章
15094浏览量
182203
发布评论请先 登录
软件定义GNSS模拟器技术原理与优势深度解析

德斯特干货|RTK/PPP/RTK-PPP毫米级 高精定位 怎么测?德思特GNSS模拟器带来高效测试方案 |

德思特干货|如何解决电离层异常对于GNSS定位的影响

GNSS卫星导航模拟器的功能与应用介绍,gnss导航模拟器,gnss卫星模拟器
u-blox ZED-X20P全频段高精度GNSS模块在贸泽开售,满足工业、UAV及机器人高精度定位需求

德思特方案 | 整车 GNSS 产线测试,3 分钟高精度验证

使用德思特GNSS模拟器实现RTK基站与流动站的独立模拟
【CPKCOR-RA8D1】基于CPKCOR-RA8D1的GNSS RTK系统设计
导远科技高精度定位系统落地自动驾驶公交车
自动驾驶中常提的RTK是个啥?


太阳光模拟器 | 在汽车自动驾驶开发中的应用

自动驾驶汽车是如何准确定位的?

技术干货 | GB/T 45086.1-2024车载定位新国标实施,自动驾驶安全再强化!




评论