 使用德思特GNSS模拟器实现RTK基站与流动站的独立模拟
使用德思特GNSS模拟器实现RTK基站与流动站的独立模拟

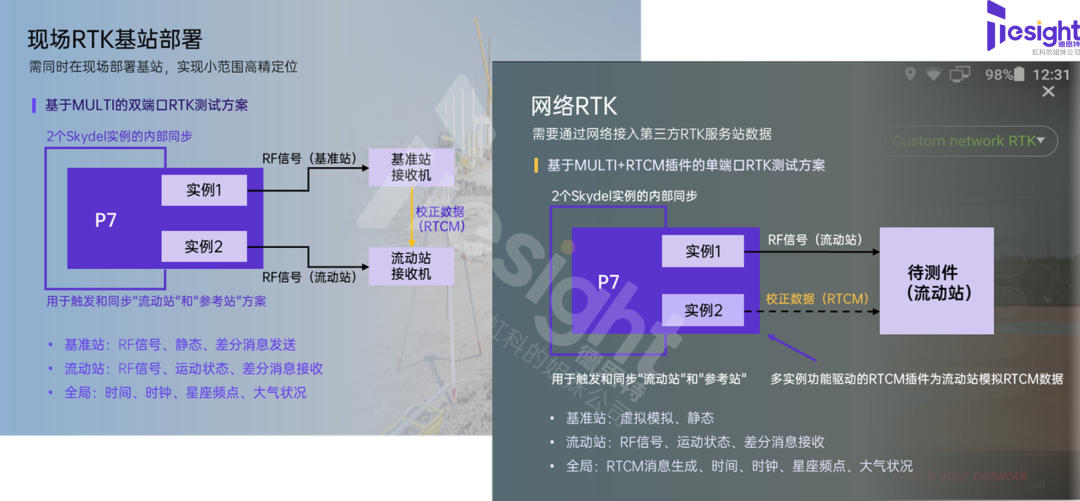
在之前的文章中,我们使用德思特GNSS模拟器实现了基于网络RTK(虚拟RTK基站)的仿真测试,实现了在一台设备内提供GNSS定位信号的同时,利用网络端口同步传输一个虚拟示例生成的RTK数据,从而实现厘米级高精定位的应用。
但实际上,可能还有一部分应用,如割草机、农业机器、测绘比较常用的,现场会部署一台便携式基站,通过该基站自身定位与移动的DUT之间的差分信息实现小范围高精定位。对于这种模式,则需要模拟两个独立输出,一个是静态的精准站,一个是运动中的流动站,还原真实使用场景,实现测试。我们今天将对这个案例做以复现与仿真测试。
测试前的准备
测试器材检查
本次测试我们需要用到的硬件有:
- GTS P74 GNSS模拟器以及配套的显示器、鼠标、键盘
- Ublox GNSS接收器,型号:C099-F9P-0,作为RTK基站
- 和芯星通GNSS接收机,型号:UM982,作为RTK流动站
- PC一台:
- 安装ublox上位机软件u-center2(ver-25.06.183857)
- 安装和芯星通上位机软件Uprecise(V2.0.1037)
- 注意:如果使用其他版本,可能部分设置有所变化
- 网线、射频电缆等其他连接用配件
测试连线

共有2组测试连线:
**① 射频连线:**GTS P74的前面板GNSS仿真信号端口出接出线缆,
- RF A:射频线缆接ublox GNSS接收机的GNSS RF端口,需根据需求配置相关衰减
- RF A:射频线缆接UM982 GNSS接收机的GNSS RF端口,需根据需求配置相关衰减
**② NMEA通信:**均通过USB线缆连入上位机,并通过对应COM口连接至上位机软件
测试配置
01 GTS P74 Skydel界面配置
1.软件license检查
打开Skydel主界面,点击"Help"-“About”,检查是否具有相关星座选件、MULTI选件;
2.基准站(Base)配置
2.1 预保存
打开一个Skydel实例,开始一个新的配置,此处可以“ctrl+s”将该配置做预保存,命名为Base以方便后续区分。
2.2 输出信号设置
注意:此处设置的信号输出将绑定端口A输出,此处DTA-2116的number号应该为0,1
导航到Settings – Output(设置 - 输出),选择DTA-2116,双击两次,分别选择【此处可根据需要设置】:
- GPS L1CA+BEIDOU B1
- GPS L2C + BEIDOU B2

2.3 时间同步
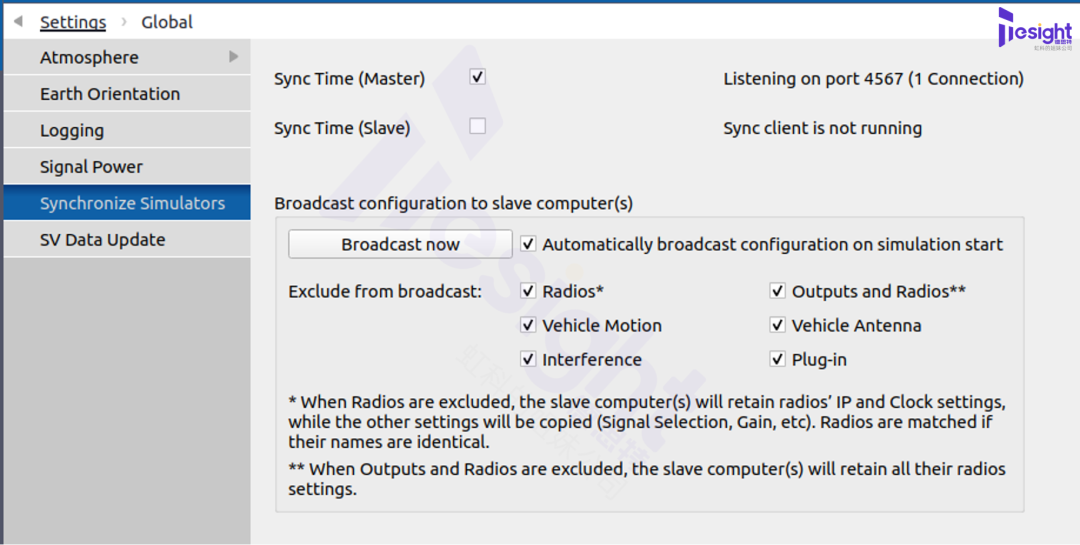
进入Settings设置 -> Global全局 -> Synchronize simulators,选择复选框Sync Time (Slave)。这将允许两个实例在同一时间启动。忽略可能出现的报错。

2.4 设置基准站坐标
在Settings设置->Vehicle车辆->Body车身中选择参考站位置。将轨迹类型设置为 "Fixed固定",并输入坐标经纬高=(30°,104°,2)

3.流动站(Rover)配置
3.1 预保存
再次点击“Skydel”图标,新打开一个Skydel实例,开始一个新的配置,此处可以“ctrl+S”将该配置做预保存,命名为Rover以方便后续区分。
3.2 输出信号设置
注意:此处设置的信号输出将绑定端口B输出,此处DTA-2116的number号应该为2,3
与基准站配置一致:导航到Settings – Output(设置 - 输出),选择DTA-2116,双击两次,分别选择:
- GPS L1CA+BEIDOU B1
- GPS L2C + BEIDOU B2

3.3 时间同步
进入Settings设置 -> Global全局 -> Synchronize simulators,设置复选框 Sync Time (Master) ,这将允许参考站模拟与流动站模拟同步开始。设置复选框 "Automatically broadcast configuration on simulation start"。在Exclude一栏, 勾选所有选项 。
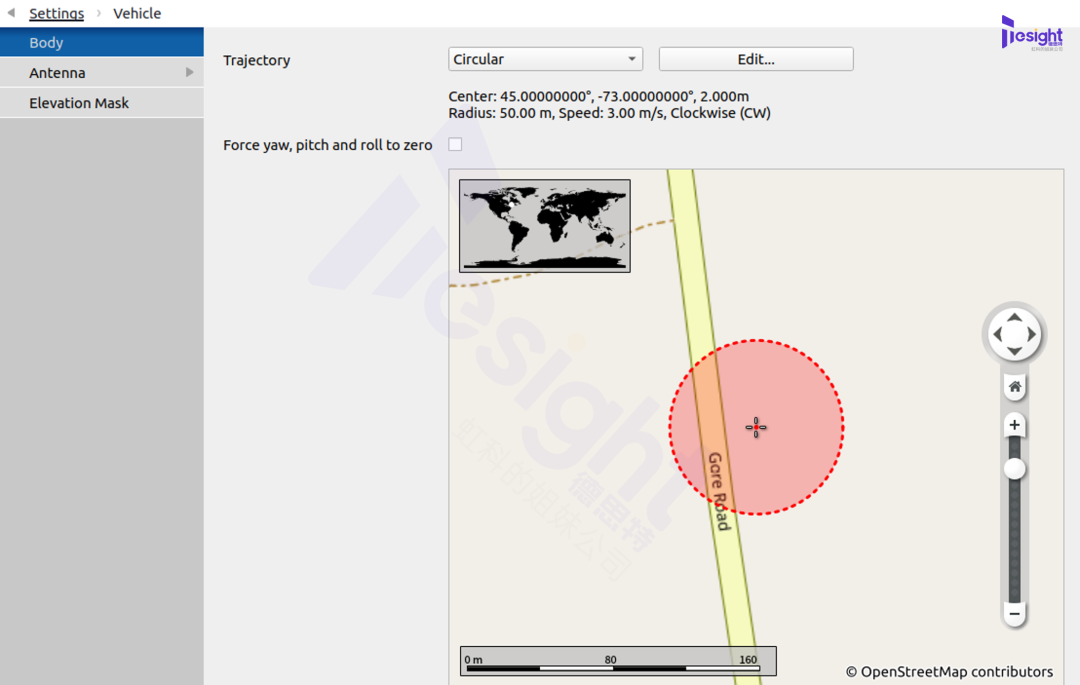
3.4设置车辆(流动站)轨迹
在Settings设置->Vehicle车辆->Body车身中选择参考站位置。将轨迹类型设置为" Circle(圆形) ",并输入坐标经纬高=(30°,104°,2),轨迹半径为500m,速度、方向默认。
4.启动仿真
在Skydel中选择“ Rover ”实例,点击“Start”,会同步开始运行两个实例。
02 基站上位机ublox u-center2配置
1.连接
在准备好的PC上连接ublox接收机,打开u-cente2r,在上方receiver选择对应串口号,设置波特率模式为:“Autobauding”,等待连接成功。

2.观测与配置
2.1 观测定位情况
Ublox中打开GNSS信号观测窗口、Chart图,点击冷启动,等待信号稳定后,观测到定位模式为3D,且出现卫星信号柱状图与定位信息。可以看到,此时定位为一个静态点,符合预期。

2.2 配置RTK基站
点击左侧工具标识,选择“ Ntrip Server/Caster ”。

配置RTK基站设置如下:
- 端口号:2101(或任意)
- 关闭授权认证(或开启)
- 设置挂载点:
- Name:TESIGHT(或任意)
- Identifier:TESIGHT(或任意)
- Country:CH
- 选中自动配置(或关闭后根据自身需要设置)

配置完成后,点击"Start",正常配置后将会变绿,并出现传输的IP地址与端口号“2101”供参考。

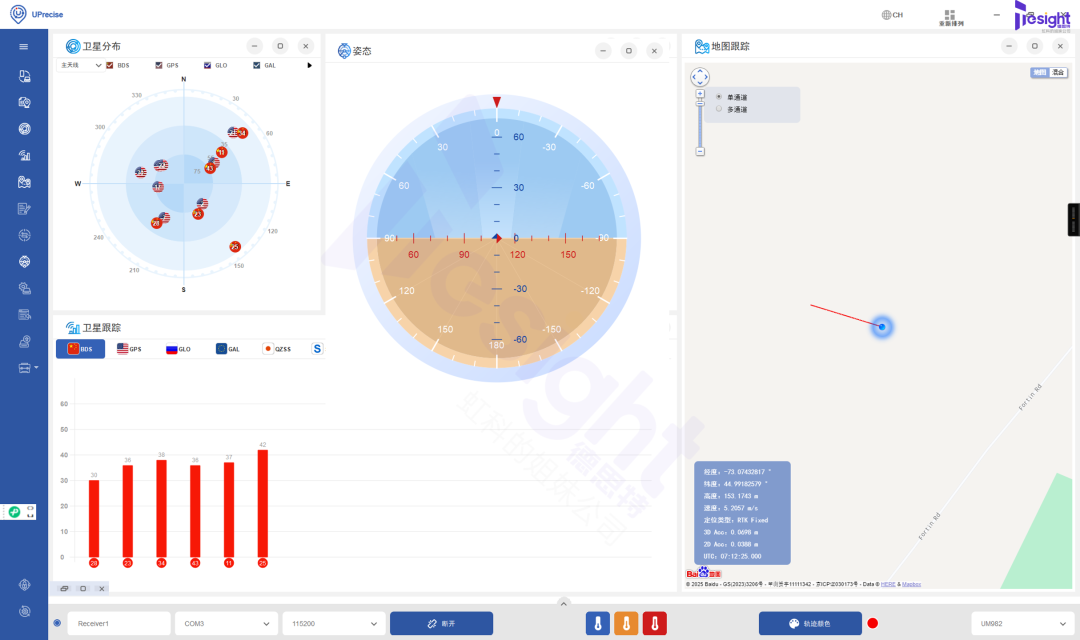
03 流动站上位机Uprecis
1.连接
在准备好的PC上连接UM982接收机,打开Uprecise,在上方receiver选择对应串口号,设置波特率模式为:“Autobauding”,等待连接成功。

2.观测与配置
2.1 观测定位情况
Ublox中打开GNSS信号观测窗口、Chart图,点击 冷启动 ,等待信号稳定后,观测到定位模式为 3D ,且出现卫星信号柱状图与定位信息。可以看到,此时定位为一个动态的圆,符合预期。
2.2 配置RTK流动站
点击左侧工具箱标识,选择“RTCM数据流”。
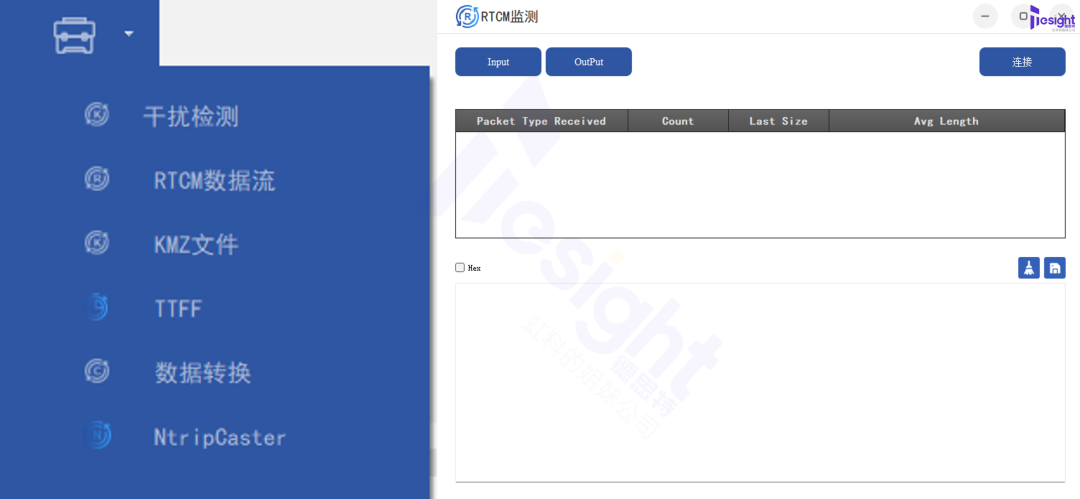
点击“Input”,配置RTK流动站设置如下:
- IP号:192.168.150.27(匹配基准站)
- 端口号:2101(匹配基准站)
- 设置挂载点:
- TESIGHT(或任意)
- User ID、password:空白
配置完成后,点击"确认"。

点击“Output”,选中接收机对应的COM口,配置完成后,点击"确认"。

返回RTCM数据流界面,勾选“Hex”,点击“连接”,开始正常传输RTCM数据。

等待一段时间后,应观测到地图中的定位状态变更为:RTK Fixed,则完成本地的基准站-流动站双站同步仿真。并且可观测到定位数据基本稳定,误差小于等于10cm。
END
通过本次实操,我们成功利用德思特GTS P74 GNSS模拟器,完整复现了基准站与流动站协同工作的RTK高精度定位测试场景。德思特模拟器凭借其灵活的多实例同步控制、精准的信号仿真能力,能够高效支撑各类差分定位算法的开发与验证,无论是网络RTK还是本地基站模式,均可真实还原复杂应用环境。
如果您正在从事自动驾驶、精准农业、无人机测绘或智能机器人等高精度定位相关领域的研究或测试,德思特GNSS模拟解决方案将为您提供可靠、便捷的一站式测试环境。欢迎有需求的客户随时联系我们,德思特团队愿以专业的技术实力,为您的项目保驾护航,助力精准定位技术的创新与应用!
-
网络
+关注
关注
14文章
8378浏览量
95700 -
模拟器
+关注
关注
2文章
1031浏览量
45920 -
GNSS
+关注
关注
9文章
1032浏览量
51492
发布评论请先 登录
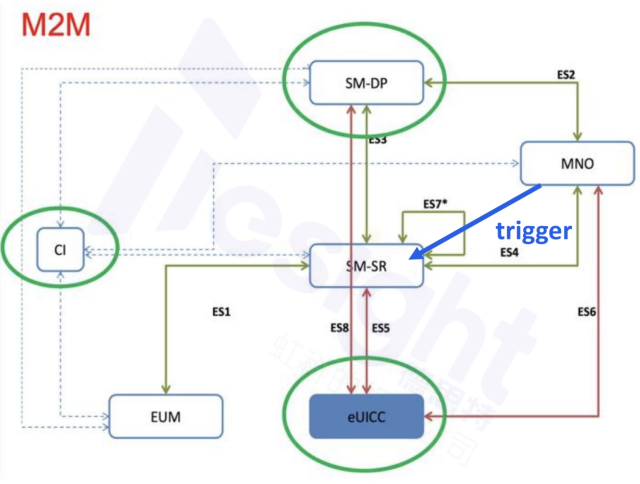
三架构全覆盖,德思特ALifecom基站模拟器精准赋能eSIM测试
【CPKCOR-RA8D1】基于CPKCOR-RA8D1的GNSS RTK系统设计

罗德与施瓦茨高端GNSS模拟器开启了GNSS模拟的革新时代
什么是GNSS模拟器及其应用?

快速选择合适的GNSS模拟器,看这几个重点!

细说GNSS模拟器的RTK功能(一)

高效模拟,灵活扩展!GNSS模拟器的多实例应用浅析(二)

如何利用GSG-721与ublox GNSS接收机实现RTK功能仿真?
德思特GNSS模拟器为物流行业保驾护航
在时间同步应用上节省大量时间!德思特GNSS模拟器是怎么做到的?
时间服务器与GNSS模拟器实现区域内可靠的室内定位





评论