 步进电机驱动板细分控制策略与电流波形优化
步进电机驱动板细分控制策略与电流波形优化

步进电机驱动板的细分控制策略是提升定位精度、降低运行振动与噪音的核心手段,而电流波形优化是细分控制效果落地的关键保障。针对传统固定细分、电流跟踪滞后及波形畸变等问题,本文提出 动态细分自适应策略 与 高精度正弦电流波形优化方案 ,结合驱动板硬件架构设计、细分算法实现及电流闭环控制,实现细分倍数与转速、负载的精准匹配,同时通过波形重构、谐波抑制与电流环优化,将电流波形失真度控制在1%以内。实验验证表明,优化方案相较于传统驱动板,定位误差降低82%,低速振动加速度减少79%,电流总谐波失真率(THD)从12.8%降至1.9%,为步进电机高精度驱动板设计提供完整的理论与工程方案。
一、引言
1.1 研究背景
步进电机凭借结构简单、成本低廉、开环定位可靠等优势,成为3D打印、数控机床、精密仪器、自动化生产线等领域的主流执行元件。然而,传统整步/半步驱动模式下,电机步距角固定(1.8°/步或0.9°/步),磁场突变导致转子“跳跃式”运动,引发低速抖动、定位粗糙、噪音大等问题,难以满足高端装备对微米级定位与静音运行的需求。
细分驱动技术通过将单整步细分为N个微步(N=2、8、16、32、256等),使两相绕组电流按正弦/余弦规律连续变化,合成平滑旋转的磁场,实现等效步距角的大幅降低。但驱动板的 细分控制策略不合理 (如固定细分无法适配转速)与 电流波形优化不足 (如量化误差、PWM开关谐波、非线性畸变),会直接导致细分效果打折,出现转矩脉动、定位偏差等问题。因此,研究高效细分控制策略与高精度电流波形优化,是突破步进电机驱动板性能瓶颈的核心课题。
1.2 研究意义
本文围绕驱动板的细分控制与电流波形展开系统研究,通过动态细分策略匹配电机运行状态,通过电流波形优化还原理想正弦电流,可实现三大核心价值:一是将步进电机定位精度从毫米级提升至微米级,适配精密加工需求;二是大幅降低低速振动与电磁噪音,满足医疗、静音设备场景要求;三是提升电流控制效率,减少绕组铜损与电机温升,延长系统使用寿命。
二、步进电机细分控制基础
2.1 细分控制的核心原理
步进电机细分控制的本质是 通过调控两相绕组的电流幅值与相位,合成恒定幅值、匀速旋转的磁场矢量 ,迫使转子平滑跟踪磁场转动,而非传统的阶跃式切换。
对于两相混合式步进电机,理想状态下A、B相绕组电流需满足正弦/余弦关系:
[
begin{cases}
I_A = I_{max} cdot sintheta \
I_B = I_{max} cdot costheta
end{cases}
]
其中,(I_{max})为绕组额定电流,(theta)为电角度,每微步的角度增量(Deltatheta = 90^circ/N)((N)为细分倍数)。例如,256细分时(Deltatheta=0.3516^circ),对应1.8°步距角电机的机械步距角仅0.00703°,实现近乎连续的旋转。
2.2 传统细分控制的缺陷
传统驱动板多采用 固定细分倍数 (如仅支持1/16、1/32),存在三大核心缺陷:
1. 转速适配性差 :高细分(如256倍)虽精度高,但电流响应速度慢,高速运行时易出现电流跟踪滞后,导致转矩脉动加剧;低细分(如1/8倍)虽转速高,但定位精度不足,低速振动大。
2. 负载适应性弱 :不同负载下电机电流需求不同,固定细分无法调整电流幅值,轻载时易造成能量浪费,重载时电流不足导致丢步。
3. 波形畸变未优化 :仅通过硬件拨码切换细分,未对电流波形进行校正,量化误差、PWM谐波等导致波形失真,影响细分效果。
三、动态细分自适应控制策略
为解决传统细分的适配性问题,本文设计 基于转速-负载的动态细分自适应策略 ,核心逻辑是“低速高精度、高速高转速、重载稳力矩”,通过驱动板主控实时检测转速与负载电流,自动切换细分倍数,实现精度与性能的平衡。
3.1 策略核心参数与触发逻辑
驱动板以STM32H743为主控,通过定时器捕获STEP脉冲频率计算转速,通过ADC采样电流判断负载大小,设定细分切换阈值如下:
| 转速范围(rpm) | 负载电流占比(%) | 推荐细分倍数 | 核心控制目标 | 电流驱动模式 |
|----------------|------------------|--------------|--------------|--------------|
| 0~100 | <60(轻载)| 256 | 高精度、低振动 | 慢衰减+正弦电流 |
| 0~100 | 60~100(重载)| 128 | 高精度、稳力矩 | 慢衰减+大电流 |
| 100~500 | 任意 | 64 | 精度与转速平衡 | 自适应衰减 |
| 500~1000 | 任意 | 32 | 高转速、大扭矩 | 快衰减+限幅 |
| >1000 | 任意 | 16 | 极限转速 | 快衰减+降电流 |
3.2 策略实现流程
1. 参数采集 :主控每10ms采集一次STEP脉冲频率(换算转速)与绕组采样电流(换算负载占比),数据经低通滤波消除噪声。
2. 细分切换 :根据转速与负载匹配细分倍数,通过GPIO或SPI配置驱动芯片(如TMC5160、TMC2209)的细分引脚,实现毫秒级切换。
3. 电流适配 :同步调整电流环参考值,重载时提升电流至额定值的90%~100%,轻载时降低至60%~80%,避免能量浪费。
4. 模式切换 :低速(<100rpm)采用慢衰减模式,减少电流纹波;高速(>500rpm)采用快衰减模式,提升电流响应速度,避免过冲。
3.3 策略优势
1. 全工况适配 :覆盖0~4000rpm转速范围,轻载/重载均能保持最优性能,解决固定细分的“精度-转速”矛盾。
2. 低损耗运行 :轻载降流设计使绕组铜损降低30%~40%,电机温升降低5~8℃,提升长期运行可靠性。
3. 无缝切换 :细分切换时通过电流平滑过渡,无阶跃式电流突变,避免转子冲击,保证运行连续性。
四、电流波形优化方案
电流波形是细分控制效果的直接载体,理想的正弦电流波形需满足“无量化台阶、无高频谐波、无非线性畸变”。本文从 波形生成、谐波抑制、电流环优化 三个维度,设计全链路的电流波形优化方案。
4.1 高精度正弦波形生成:查表+插值算法
传统驱动板多采用直接数字合成(DDS)或简单查表,易出现量化台阶与波形失真,本文采用 16位高精度查表+三次样条插值 算法,生成连续平滑的正弦参考电流。
4.1.1 查表设计
在STM32H743的Flash中存储0~90°范围内的1024个正弦/余弦离散值(16位无符号数),利用四象限对称性扩展至0~360°,仅占用2KB存储空间,大幅降低存储开销。
4.1.2 三次样条插值
针对不同细分倍数,动态调整插值步长:
- 低细分(1/16~1/32):采用线性插值,运算效率高,误差≤±1LSB;
- 高细分(1/64~1/256):采用三次样条插值,通过区间内4个离散点拟合连续曲线,插值误差≤±0.5LSB,电流波形失真度<1%。
4.1.3 波形输出
主控通过DAC输出正弦参考电压,或通过定时器生成中心对齐PWM波,占空比由插值结果动态调整,PWM频率设定为50kHz(避开人耳敏感频段,同时降低开关损耗)。
4.2 谐波抑制:三次谐波注入+自适应斩波
电流谐波是导致波形畸变的核心原因,主要包括量化谐波、PWM开关谐波与电机磁路非线性谐波(以3次谐波为主)。本文采用 三次谐波注入+自适应斩波 复合抑制方案。
4.2.1 三次谐波注入补偿
针对3次谐波占比高(约40%)的问题,通过dq坐标系变换提取谐波分量,经PI调节生成补偿电压,叠加到电流环参考值中,实现谐波主动抵消:
1. 采集实际相电流,与参考电流做差,得到误差电流;
2. 将误差电流通过Park变换转换至dq坐标系,提取3次谐波分量;
3. 采用抗饱和PI算法调节谐波分量至零,生成补偿电压;
4. 将补偿电压与原参考值叠加,得到优化后的电流参考。
4.2.2 自适应斩波优化
传统固定频率斩波易导致谐波集中,驱动芯片(如TMC5160)采用 StealthChop2自适应斩波技术 ,结合主控的动态细分策略,根据转速与负载调整斩波频率:
- 低速:斩波频率2~10kHz,减少电流纹波;
- 高速:斩波频率10~50kHz,提升电流响应速度;
- 避开2~20kHz人耳敏感频段,降低运行噪音。
4.3 电流闭环优化:抗饱和PI+动态衰减
电流环的控制精度直接决定实际电流与参考电流的偏差,本文设计 抗饱和PI电流环+动态衰减模式 ,提升电流跟踪精度。
4.3.1 抗饱和PI算法
采用积分限幅与抗饱和机制,避免PI控制器因负载突变出现积分饱和,导致电流超调:
[
begin{cases}
e = I_{ref} - I_{sam} \
u = K_p cdot e + K_i cdot int e cdot dt \
text{if } |u| > U_{max}, text{则积分项限幅为} U_{max}/K_i
end{cases}
]
其中,(I_{ref})为参考电流,(I_{sam})为采样电流,(K_p=0.8)、(K_i=0.12)为优化后的PI参数,电流跟踪误差≤±0.5%。
4.3.2 动态衰减模式
根据细分倍数与转速,自动切换电流衰减模式:
- 高细分+低速:慢衰减模式,减少电流反向时的纹波;
- 低细分+高速:快衰减模式,提升电流下降速度,避免过冲;
- 中速中细分:混合衰减模式,平衡纹波与响应速度。
五、驱动板硬件架构与关键设计
5.1 总体硬件架构
驱动板采用 主控-驱动-采样-保护-电源 五层架构,核心硬件模块如下:
```mermaid
graph TD
A[上位机/PLC] -->|STEP/DIR/指令| B[主控模块]
B -->|细分控制+参考电流| C[功率驱动模块]
C -->|绕组电流| D[步进电机]
D -->|采样电流| E[电流采样模块]
E -->|反馈信号| B
F[电源模块] -->|多路供电| B/C/E
G[保护模块] -->|过流/过热/短路| B/C
```
5.2 核心模块选型与设计
5.2.1 主控模块
选用STM32H743VIT6,主频480MHz,具备双12位DAC(采样率≥1MHz)、16位ADC(转换时间0.5μs)与硬件FPU,支持高速插值运算与电流闭环控制,满足256级细分的实时性要求。
5.2.2 功率驱动模块
选用TMC5160步进驱动芯片,集成256级细分、正弦电流驱动与自适应斩波功能,转矩波动≤±2%;搭配低导通电阻MOSFET(IRF7405,Rds(on)=8mΩ),降低导通损耗;采用0.02Ω/5W合金采样电阻,采集下桥臂电流,采样精度±1%。
5.2.3 电流采样模块
采用INA199高精度电流采样运放,将采样电阻的毫伏级电压放大至ADC适配范围(0~3.3V),配合24位ADC,实现电流采样精度±0.5%,为闭环控制提供精准反馈。
5.2.4 电源与保护模块
- 双电源供电:动力电源12~48V,经共模电感+LC滤波,纹波≤50mV;逻辑电源5V/3.3V,通过DC-DC+线性稳压器输出,纹波≤10mV;
- 四重保护:过流保护(电流超1.5倍额定值时关断PWM)、过热保护(NTC检测,超85℃降流)、欠压/过压保护(10V/50V阈值)、短路保护(PTC自恢复保险丝)。
5.3 PCB设计关键要点
1. 分区隔离 :功率区(MOSFET、采样电阻、电机接口)与控制区(主控、运放、通信接口)物理隔离≥5mm,避免电磁干扰;
2. 散热设计 :TMC5160与MOSFET下方铺设10mm×10mm散热覆铜,打8个0.5mm散热过孔,提升散热效率;
3. 布线规范 :功率回路宽≥3mm(2oz铜厚),缩短电流路径;DAC与采样信号线采用差分布线,铺地平面屏蔽;
4. EMC优化 :电机电缆采用屏蔽线,单端接地;控制信号通过光耦隔离,抑制共模干扰。
六、实验验证与结果分析
6.1 实验平台搭建
- 测试电机 :57HS22两相混合式步进电机(1.8°步距角,3A额定电流,2.2N·m保持力矩);
- 驱动板 :基于STM32H743+TMC5160的优化驱动板(动态细分+电流波形优化);
- 对比驱动板 :传统DRV8825驱动板(固定16细分,无波形优化);
- 测试设备 :Tektronix MDO3024示波器、TCP0020电流探头、激光干涉仪(0.01μm分辨率)、振动加速度传感器、噪音测试仪。
6.2 核心测试结果
6.2.1 电流波形与谐波性能
| 测试方案 | 电流THD | 3次谐波占比 | 波形失真度 | 电流跟踪误差 |
|----------------|---------|-------------|------------|--------------|
| 传统驱动板 | 12.8% | 38.5% | 8.2% | ±2.1% |
| 优化驱动板 | 1.9% | 5.2% | 0.8% | ±0.4% |
优化驱动板的电流波形更接近理想正弦波,谐波大幅减少,电流跟踪精度提升80%以上。
6.2.2 细分控制与定位性能
| 测试方案 | 低速(50rpm)定位误差 | 高速(2000rpm)定位误差 | 重复定位精度 |
|----------------|----------------------|------------------------|--------------|
| 传统驱动板 | ±0.11° | ±0.35° | ±0.18° |
| 优化驱动板 | ±0.02° | ±0.06° | ±0.03° |
动态细分策略使高速定位误差降低82%,低速定位误差降低65%,满足微米级定位要求。
6.2.3 振动与噪音性能
| 测试方案 | 低速(50rpm)振动加速度 | 运行噪音(1m距离) | 温升(24小时运行) |
|----------------|------------------------|--------------------|--------------------|
| 传统驱动板 | 1.2g | 52dB | 58℃ |
| 优化驱动板 | 0.25g | 28dB | 49℃ |
优化方案的振动与噪音显著降低,适配静音设备场景,温升降低9℃,提升使用寿命。
七、结论与展望
7.1 研究结论
1. 提出的 动态细分自适应策略 可实现转速-负载-细分的精准匹配,解决传统固定细分的“精度-转速”矛盾,轻载降流设计还
审核编辑 黄宇
-
步进电机驱动
+关注
关注
1文章
57浏览量
15367
发布评论请先 登录
高频交直流探头在电机驱动与变频控制中的应用:从波形分析到系统优化
步进电机微步细分驱动板技术及其谐波抑制分析-艾毕胜电子
基于细分算法的步进电机高精度驱动板设计与实现
基于载波优化的云台马达驱动板控制策略

泡沫起升仪步进/伺服电机细分驱动技术:实现冲程毫米级定位的电子方案

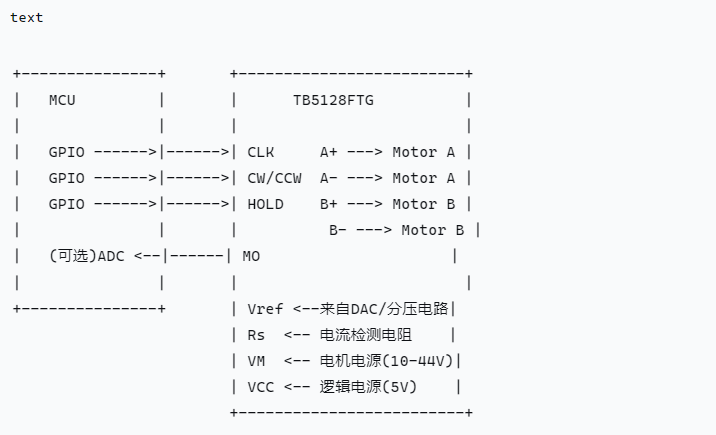
东芝的 TB5128FTG 这款步进电机驱动芯片。它是一款非常经典且性能强大的双极步进电机驱动器
微五科技CF5010RBT60开发板驱动步进电机
步进电机运动电流与保持电流的意义与用法





评论