 步进电机细分大小与抗干扰有关吗
步进电机细分大小与抗干扰有关吗

步进电机作为一种将电脉冲信号转换为角位移的执行元件,在工业控制、自动化设备、3D打印等领域广泛应用。其运行性能受多种因素影响,其中细分驱动技术和抗干扰能力是工程师特别关注的两个核心问题。本文将深入探讨步进电机细分大小与抗干扰性的关联机制,并结合实际应用场景分析优化策略。

一、步进电机细分技术原理与实现
步进电机的细分驱动本质是通过改变绕组电流的阶梯变化方式,将一个整步角分解为若干微步。传统全步进模式下,电机每接收一个脉冲转动1.8°(以两相混合式步进电机为例),而采用16细分时,每个脉冲仅对应0.1125°的转动。这种技术突破依赖于驱动器的精密电流控制能力,通过PWM调制生成正弦波阶梯电流,使转子在两个整步位置间实现平滑过渡。
现代驱动器如TB6600、DM542等采用矢量控制算法,能够实现最高256细分。高细分带来的直接效益是运动平滑度的显著提升,某实验数据显示:当细分从4增加到64时,电机振动幅度降低约60%。但值得注意的是,细分设置过高可能导致转矩波动加剧,某型号电机在128细分时保持转矩较16细分下降约15%,这源于高频开关损耗增加导致的电流纹波增大。
二、电磁干扰对步进系统的影响机制
工业现场常见的干扰源包括变频器辐射(频段0.5-10MHz)、电源线传导干扰(幅度可达额定电压20%)以及接地环路引入的共模噪声。这些干扰主要通过三条路径影响步进系统:
1. 信号传输干扰:脉冲方向信号在长距离传输时易受电磁感应影响,某案例显示未屏蔽电缆在变频器附近误码率升高至10⁻³
2. 电源质量扰动:开关电源的电压跌落(如瞬间下降15%)会导致驱动器欠压保护
3. 空间辐射干扰:电机绕组作为天线可接收30-100MHz频段噪声,某测试中未滤波电机电缆辐射超标12dB
这些干扰的直接影响表现为丢步(位置误差累积)、堵转(瞬时转矩不足)以及控制器死机(逻辑电路受扰)。某自动化生产线统计显示,电气干扰导致的故障占比达34%,其中细分设置不当放大干扰效应的案例占18%。
三、细分参数与抗干扰性的耦合关系
1. 脉冲频率敏感性:高细分意味着相同转速下需要更高频率的脉冲信号。当设置为64细分时,300rpm转速对应的脉冲频率达51.2kHz,此时信号边沿受电缆分布电容影响更显著。实验测得0.5m非屏蔽线在50kHz传输时上升沿延迟达120ns,超过驱动器最小识别脉宽要求。
2. 电流环响应特性:细分等级提升会降低电流环更新周期。以典型1.2A电机为例,16细分时电流调节周期为25μs,而256细分时缩短至1.56μs,这使得系统对采样噪声更敏感。某伺服对比测试显示,256细分下的电流波动系数比16细分高2.3倍。
3. EMC设计平衡点:高细分需要更快的MOSFET开关速度(dV/dt可达5000V/μs),这会增加高频辐射。实测数据显示,128细分驱动器的30MHz辐射比16细分高8dBμV/m。但另一方面,细分降低可减少边沿谐波,4细分时的传导干扰比64细分低6dB。
四、工程优化方案与实践案例
1. 分级细分策略:某数控机床采用动态细分方案,低速段(<500rpm)使用128细分保证精度,高速段切换至8细分提升抗干扰能力,位置误差控制在±0.05°内。
2. 硬件增强措施:
● 采用磁环滤波(如Fair-Rite 2673002401)可将30MHz噪声衰减15dB。
● 双绞屏蔽线(屏蔽层360°端接)使信号传输距离延长至10m无丢步。
● 加装TVS二极管(SMBJ15CA)抑制5kV浪涌干扰。
3. 软件容错设计:
● 增加脉冲宽度检测(>500ns有效)。
● 采用CRC校验通信协议(如Modbus RTU)。
某包装机械项目应用上述综合方案后,即使邻近10kW变频器工作,步进系统误动作率从3次/班降至0.2次/月,验证了合理细分设置(最终选定32细分)与抗干扰设计的协同效应。
五、未来技术发展方向
新一代智能驱动器开始集成自适应细分技术,如STSPIN820通过实时监测负载惯量自动优化细分参数。同时,SiC功率器件(导通电阻低至80mΩ)的应用可减少开关噪声,实验表明采用SiC MOSFET的驱动器在256细分时辐射降低40%。此外,时间敏感网络(TSN)协议的引入使步进系统在工业物联网中具备更强的抗干扰能力,某预测显示到2026年将有35%的新装驱动器支持TSN。
总结而言,步进电机细分大小与抗干扰性存在显著关联,但通过系统级的电磁兼容设计、动态参数调整以及新型器件的应用,完全可以实现高精度与高可靠性的统一。工程师应在理解具体应用场景的干扰频谱特征基础上,通过实验确定最佳细分参数,通常建议在16-64细分范围内根据速度要求折中选择,并配合适当的滤波和屏蔽措施。
审核编辑 黄宇
-
步进电机
+关注
关注
153文章
3271浏览量
152768 -
抗干扰
+关注
关注
5文章
348浏览量
35890 -
智能驱动器
+关注
关注
0文章
8浏览量
7718
发布评论请先 登录
步进电机驱动板细分控制策略与电流波形优化
步进电机微步细分驱动板技术及其谐波抑制分析-艾毕胜电子
基于细分算法的步进电机高精度驱动板设计与实现
步进电机及驱动器干扰问题解决措施

高精度步进电机驱动板设计:从细分到闭环的全链路优化
步进电机驱动器的作用介绍

单片机抗干扰技术的常用方法
泡沫起升仪步进/伺服电机细分驱动技术:实现冲程毫米级定位的电子方案


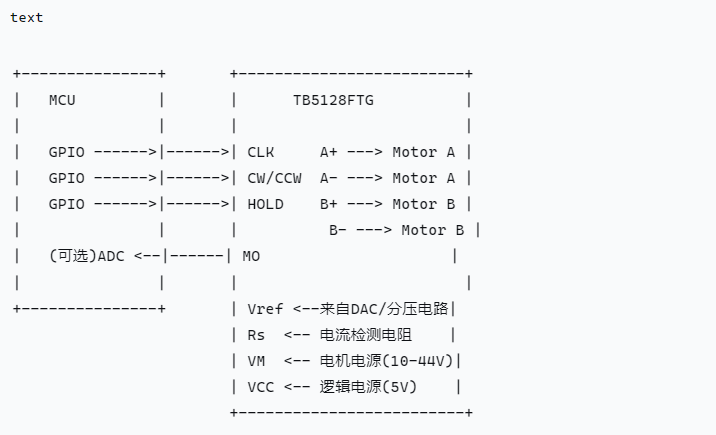
东芝的 TB5128FTG 这款步进电机驱动芯片。它是一款非常经典且性能强大的双极步进电机驱动器
步进电机运动电流与保持电流的意义与用法

干货|抗干扰天线的性能怎么测试?





评论