 PID与自动增益对比分析
PID与自动增益对比分析

PID(比例-积分-微分控制)和自动增益控制(AGC,Automatic Gain Control)都是经典的闭环控制算法,但它们的目标、应用场景和原理有本质区别。

简单来说:
PID追求的是让某个物理量精确等于设定值,擅长处理动态变化。
AGC追求的是让输出信号的幅度保持恒定,擅长应对输入信号的大范围波动。
下面从几个维度详细对比:
一、 核心目标
| 特性 | PID 控制 | 自动增益控制 (AGC) |
|---|---|---|
| 控制目标 | 使被控量(位置、温度、速度等)精确跟随设定值 | 使输出信号的幅度(或功率)保持恒定 |
| 误差定义 | 设定值 - 当前值 | 参考电平 - 输出幅度(或输出幅度 - 设定值) |
| 本质 | 随动/调节系统,消除动态与稳态误差 | 幅度稳定系统,抑制输入信号幅度变化 |
二、 典型应用场景
PID 控制
物理量控制:电机转速、无人机姿态、恒温箱温度、机器人关节位置。
工业过程:流量、压力、液位控制。
特点:被控对象通常是机械、热力、电磁等具有惯性和延迟的系统。
自动增益控制
通信系统:无线接收机中,保证无论远近信号强弱,解调器输入幅度稳定。
测试仪器:频谱仪、示波器中的中频增益控制,以扩展动态范围。
特点:处理的是电信号(电压/电流),对象通常是可变增益放大器(VGA)或数字乘法器。
三、 控制结构对比
PID 控制结构
典型的负反馈结构:

控制器输出直接作用于执行机构(如电机、加热丝)。
AGC 控制结构
也是一种负反馈,但通常包含幅度检测环节:

控制器输出是增益控制电压(或数字控制字)。
反馈量是输出信号的幅度包络,而不是瞬时值。
四、 算法原理差异
PID 算法
PID 控制器根据当前误差e(t)计算控制量:e(t)计算控制量:

比例 (P):快速响应当前误差,但可能留有余差。
积分 (I):消除稳态误差,但可能引起积分饱和。
微分 (D):预测误差变化趋势,增加阻尼,抑制振荡。
PID 关注的是瞬时误差,响应速度快,但要求系统模型相对明确或参数可整定。
AGC 算法
AGC 通常处理的是信号的幅度(或功率),属于慢速平均控制:
检测:将输出信号的幅度(通常用峰值、均方根或对数)提取出来。
比较:检测值与参考电平比较,得到误差。
滤波/积分:误差信号经过低通滤波或积分,产生增益控制信号。
调整增益:控制 VGA 的增益,使输出幅度趋近参考值。
典型的模拟 AGC 环路就是一个积分器(相当于 PID 中的 I 项),而数字 AGC 常用比例 + 积分,很少使用微分,因为幅度变化通常是慢变的。
AGC 的关键是时间常数:
时间常数太短 → 会跟随信号调制包络,造成增益调制失真。
时间常数太长 → 对输入幅度突变响应太慢,可能导致信号过载或失步。
五、 关键差异总结
| 维度 | PID | AGC |
|---|---|---|
| 误差信号 | 瞬时值误差 | 幅度平均值误差 |
| 控制量 | 直接作用于执行机构(功率、位置等) | 控制可变增益元件的增益 |
| 响应速度 | 可快(ms级甚至μs级) | 通常较慢(需避让信号调制) |
| 非线性处理 | 通常假设线性对象,有抗饱和机制 | 常工作在对数域(dB线性),以扩大动态范围 |
| 稳定性 | 依赖对象模型,需整定参数 | 依赖环路增益和滤波器,通常设计为过阻尼 |
| 典型应用 | 位置、速度、温度、压力 | 无线接收机、音频电平控制、光模块 |
六、 两者结合的情况
在某些复杂系统中,PID 和 AGC 可能同时出现,但作用层次不同。例如:
RF 功率放大器控制
用 AGC 稳定输出功率(抵抗输入功率变化和温度漂移),同时内部用 PID 控制偏置电路的温度补偿。
电机伺服系统中的电流环
速度环/位置环用 PID,而电流环本质上是一个快速的“幅度控制”——它控制 PWM 占空比,使电机绕组电流跟随指令值,这与 AGC 思路类似但响应极快,通常不叫 AGC。
光模块中的激光器驱动
用 APC(自动功率控制,类似 AGC 原理)稳定平均光功率,同时用 PID 控制温度(TEC 控制)。
七、 设计时的选择思路
如果控制对象是机械、热工、流体等,有惯性和延迟,且要求精确跟随设定值→ 选择 PID 或基于模型的控制。
如果对象是信号链路,输入信号幅度变化剧烈,需要输出幅度恒定,且允许一定的响应延迟→ 选择 AGC。
如果既要快速响应又要幅度稳定(如某些突发通信系统)→ 可能需要前馈 + AGC 组合,或采用数字域快速归一化算法。
审核编辑 黄宇
-
PID
+关注
关注
38文章
1505浏览量
91874
发布评论请先 登录
IDT Serial RapidIO 交换机特性对比分析
君耀压敏电阻KD14系列与KD14-X8系列对比分析指南

芯知识|为什么WT588F02A-16S录放音语音芯片必须配备自动增益控制麦克风?

对比分析电能质量在线监测装置支持的断点续传文件传输协议的优缺点

自动增益控制麦克风:WT588F02A-16S录放音语音芯片提升音质的关键选择

AES加密模式简介与对比分析
基美通用贴片电容CAN18C系列与CAN18X系列的对比分析
泰克示波器MDO3000与MDO4000C采样率对比分析

TaskPool和Worker的对比分析
PID串级控制在同步发电机励磁控制中的应用
铠装光缆和一般光缆区别对比分析

国内外电机结构 工艺对比分析
主流汽车电子SoC芯片对比分析
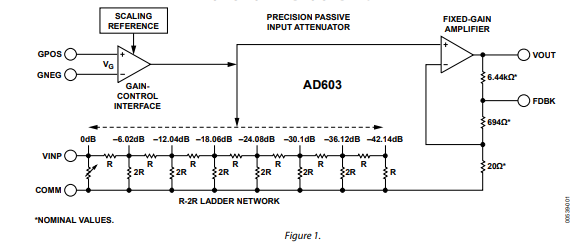
AD603低噪声、90 MHz可变增益放大器技术手册



评论