 LMK04816:高性能时钟调节器的全面解析
LMK04816:高性能时钟调节器的全面解析

LMK04816:高性能时钟调节器的全面解析
在当今的电子设计领域,时钟信号的质量对于系统的性能和稳定性起着至关重要的作用。TI的LMK04816作为一款高性能的时钟调节器,凭借其卓越的特性和广泛的应用场景,成为了众多工程师的首选。今天,我们就来深入探讨一下LMK04816的各项特性、应用以及设计要点。
文件下载:lmk04816.pdf
一、LMK04816的特性亮点
1. 超低RMS抖动性能
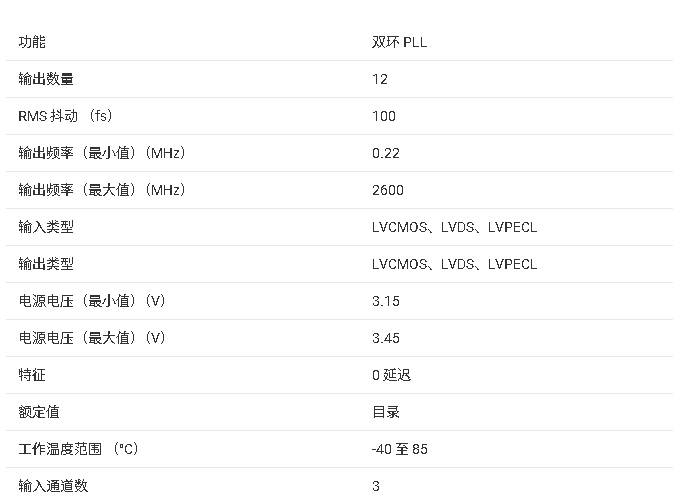
LMK04816拥有出色的超低RMS抖动性能,在12 kHz至20 MHz的频率范围内,RMS抖动低至100 fs;在100 Hz至20 MHz的范围内,RMS抖动为123 fs。这种低抖动特性能够有效减少时钟信号的噪声干扰,提高系统的稳定性和可靠性。
2. 双环PLLATINUM™PLL架构
该架构由PLL1和PLL2组成,各自具备独特的功能。PLL1集成了低噪声晶体振荡器电路,当输入时钟丢失时,支持保持模式,可实现自动或手动触发和恢复。PLL2具有归一化1 - Hz PLL噪声底至 - 227 dBc/Hz的优异性能,相位检测器速率高达155 MHz,还集成了低噪声VCO,VCO频率范围从2370 MHz至2600 MHz。
3. 冗余输入时钟与灵活输出配置
LMK04816提供三个冗余输入时钟,并支持自动和手动切换模式,确保在输入时钟出现故障时系统仍能正常工作。其输出配置也十分灵活,具有50%占空比输出分频,范围从1到1045(偶数和奇数),支持LVPECL、LVDS或LVCMOS可编程输出,还具备精密数字延迟,可固定或动态调整。
4. 其他特性
此外,LMK04816还具有25 - ps步长模拟延迟控制,最大可达575 ps;1/2时钟分配周期步长数字延迟,最多可达522步;拥有13个差分输出,最多可扩展至26个单端输出;时钟速率最高可达2600 MHz,支持0 - 延迟模式;在电源开启时提供三个默认时钟输出;具备多模式操作,包括双PLL、单PLL和时钟分配模式;工作温度范围为 - 40°C至 + 85°C,工作电压为3.15 - V至3.45 - V,采用64 - 引脚WQFN封装。
二、应用场景广泛
LMK04816的应用场景十分丰富,涵盖了数据转换器时钟和无线基础设施、网络、SONET或SDH、DSLAM、医疗、视频、军事和航空航天以及测试和测量等多个领域。在这些应用中,LMK04816能够为系统提供稳定、低抖动的时钟信号,确保系统的高性能运行。
三、详细功能解析
1. 系统架构
LMK04816的双环PLL架构能够在最宽的输出频率范围和相位噪声积分带宽内提供最低的抖动性能。PLL1由外部参考时钟驱动,使用外部VCXO或可调晶体为PLL2提供频率准确、低相位噪声的参考时钟。PLL2则可以在较宽的环路带宽下工作,充分利用内部VCO的低高频偏移相位噪声特性,从而实现超低抖动。
2. 输入输出特性
- PLL1参考输入:提供三个参考时钟输入(CLKin0、CLKin1和CLKin2),支持手动和自动切换模式,并且输入分频器可以使不同频率的输入时钟在切换时无需重新编程PLL1的R分频器。CLKin1还可用于0 - 延迟模式的外部反馈或外部VCO输入。
- *PLL2 OSCin和OSCin端口**:该端口由PLL1锁定的外部振荡器反馈驱动,可接受单端或差分信号,必须进行交流耦合。内部电路还支持基于晶体的振荡器电路的实现。
- 时钟输出:具有12个时钟输出,每个时钟组都有独立的分频器和延迟控制。输出类型可编程,支持LVDS、LVPECL和LVCMOS。此外,还提供了VCXO和晶体缓冲输出,可用于驱动外部设备。
3. 输入时钟切换模式
LMK04816支持手动、引脚选择和自动三种时钟输入切换模式。在不同的模式下,系统能够根据输入时钟的状态和配置进行灵活切换,确保系统的稳定性和可靠性。
4. 保持模式
当输入时钟参考无效时,保持模式可使PLL2保持锁定在频率上,同时PLL1的电荷泵处于三态,设置固定的调谐电压以实现开环操作。通过编程可以启用保持模式,并设置不同的子模式,如固定CPout1和跟踪CPout1。
5. 数字锁检测
PLL1和PLL2都支持数字锁检测功能,通过比较参考路径和反馈路径的相位,当时间误差小于指定窗口大小时,锁检测计数递增,当达到用户指定的值时,锁检测被断言为真。该功能可用于监测PLL的锁定状态,还可与保持模式结合使用,实现自动退出保持模式。
四、设计要点与注意事项
1. 环路滤波器设计
每个PLL都需要一个专用的环路滤波器。PLL1的环路滤波器应设计为总闭环带宽在10 Hz至200 Hz的范围内,以确保对参考时钟的抖动进行有效清理。PLL2的环路滤波器则需要考虑VCO的调谐范围和Kvco值的变化,以保证环路的稳定性。
2. 时钟输入和输出驱动
- 时钟输入:CLKin端口可以接受差分或单端信号,根据信号类型选择合适的输入模式和耦合方式。在使用差分信号时,建议设置为双极性输入模式,并进行交流耦合;在使用单端信号时,需要根据信号源的类型选择合适的耦合方式和输入缓冲类型。
- 时钟输出:在终止时钟驱动器时,需要遵循传输线理论,确保阻抗匹配,以防止反射。不同类型的输出(如LVDS、LVPECL和LVCMOS)需要采用不同的终止和耦合方法,以确保接收器在最佳的直流电压(共模电压)下工作。
3. 电源供应
- Vcc引脚连接:所有Vcc引脚必须连接,部分引脚具有内部电容,可有效过滤高频噪声。对于CLKout Vcc引脚,可以使用铁氧体磁珠减少不同时钟输出频率之间的串扰,但需要注意确保电源能够提供足够的开关电流。
- LVPECL输出:不建议在LVPECL输出端连接电容到地,以免产生大的开关电流,导致Vcc噪声和尖峰。
- 未使用的时钟输入和输出:未使用的时钟输出应保持浮空并断电,未使用的时钟输入可以保持浮空。
4. 布局设计
为了确保LMK04816的性能和可靠性,布局设计至关重要。需要注意热管理,通过在PCB上设计散热图案和多个过孔连接到接地层,将热量从封装中散发出去。同时,要注意时钟信号的布线,尽量减少PCB上的串扰。
五、编程与配置
LMK04816通过32位寄存器进行编程,每个寄存器由5位地址字段和27位数据字段组成。编程时需要注意寄存器的顺序和特殊编程情况,如在某些情况下需要额外的CLKuWire周期来使新编程的分频或延迟值生效。
1. 特殊编程情况
当编程寄存器R0至R5以更改CLKoutX_Y_DIV分频值或CLKoutX_Y_DDLY延迟值时,如果CLKoutX_Y_DIV > 25或CLKoutX_Y_DDLY > 12,则需要在加载寄存器后额外提供3个CLKuWire周期。此外,当SYNC_EN_AUTO = 1时,还需要考虑SYNC事件的生成。
2. 推荐编程顺序
推荐按照从R0到R31的顺序进行编程,首先设置R0的复位位以确保设备处于默认状态,然后根据需要配置时钟输出、PLL参数、状态引脚等寄存器。
六、总结
LMK04816作为一款高性能的时钟调节器,具有超低抖动、灵活的输入输出配置、多种工作模式和强大的功能特性,适用于各种复杂的电子系统设计。在设计过程中,需要充分考虑环路滤波器设计、时钟输入输出驱动、电源供应、布局设计和编程配置等方面的要点,以确保系统的性能和可靠性。希望通过本文的介绍,能够帮助各位工程师更好地理解和应用LMK04816,在实际设计中取得更好的效果。
如果你在使用LMK04816的过程中遇到任何问题或有独特的设计经验,欢迎在评论区留言分享,让我们一起探讨和进步!
发布评论请先 登录
LMK04816 具有双环 PLL 的三输入低噪声时钟抖动消除器
LMK03002/LMK03002C精密时钟调节器数据表

LMK04816具有双环PLL的三输入低噪声时钟抖动消除器数据表



评论