 ABB工业机器人DSQC1030新I/O配置介绍
ABB工业机器人DSQC1030新I/O配置介绍

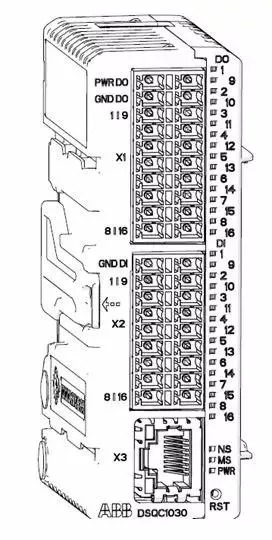
1)ABB新机器人逐渐开始使用DSQC1030(如下图)代替原有DSQC652IO版
2)该硬件使用Ethernetip协议。机器人不需要额外配置选项。如果机器人需要做主站连接其他Ethernetip从站或者机器人做Etherneti从站连接其他设备主站,仍需要购买选项841-1Ethernetip Scanner/Adapter
3)硬件连接:
出厂会默认把X5网口(设备底部)和控制器X4 LAN2口上
硬件最上端的x4为设备供电,默认已经从xt31引电过来
X1为输出,其中PWR DO和GND DO为DO的24v和0v,需要单独接电(也可从XT31引电),相当于之前DSQC652的9和10针脚
X2为输入,其中GND DI为DI的0v,需要单独接线(也可从XT31接线)
4)第一次开机后,系统会自动识别硬件,给出提示
5)根据提示配置,完成配置后就自动分配16di和16do
6)如果开机错过配置提示,也可进入控制面板-配置-Ethernetip Device,添加
模板选择ABB LOCAL I/O,地址192.168.125.100
7)后续添加signal,方法和之前类似,所属设备选Local IO
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
面板
+关注
关注
13文章
1728浏览量
55470 -
工业机器人
+关注
关注
91文章
3552浏览量
98542 -
ABB
+关注
关注
26文章
573浏览量
57421
原文标题:ABB工业机器人新I/O DSQC1030配置
文章出处:【微信号:GKYXT1508,微信公众号:工控云学堂】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
3.5寸嵌入式主板:实现商业服务机器人高密I/O设计
在商场、酒店、政务大厅等高频人流场景中,商业服务机器人正从“展示品”走向“生产力工具”。然而,在实际部署中,运营厂商普遍面临三大挑战:主板体积受限难以嵌入紧凑机身、I/O接口繁杂导致外设连接捉襟见肘

工业机器人TOP1,切入人形机器人赛道,意欲何为?
电子发烧友原创 工业机器人作为推动全球制造业转型的关键驱动力,近年来取得了飞速的发展。据MIR DATABANK最新数据统计,2025年Q1,中国工业机器人整体市场销量同比增长11.6

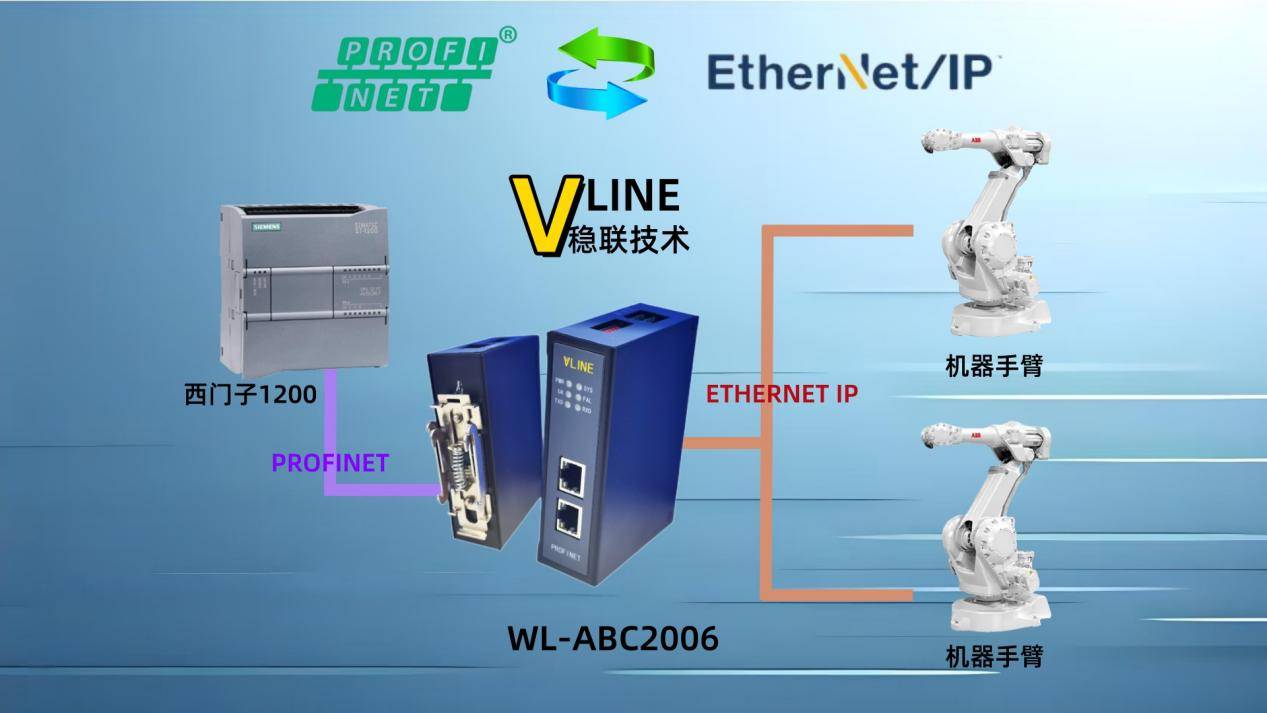
极速组态!Profinet转Ethernet网关让ABB机器人主站秒连工业网络(上集)
ABB机器人授权许可 启用841-1功能模块 若需对机器人的IP地址进行设置,可按顺序依次点击“控制面板”“主题”“IP设置”“通信”。 选取从站模块以实现网络连接 操作路径为:控制面板→配置
突发!ABB机器人业务易主,软银53.75亿美元接盘
着全球机器人产业格局将发生深刻变化。 该决定引发了业界的广泛关注。作为全球工业机器人 “四大家族” 之一,ABB 机器人业务 2024
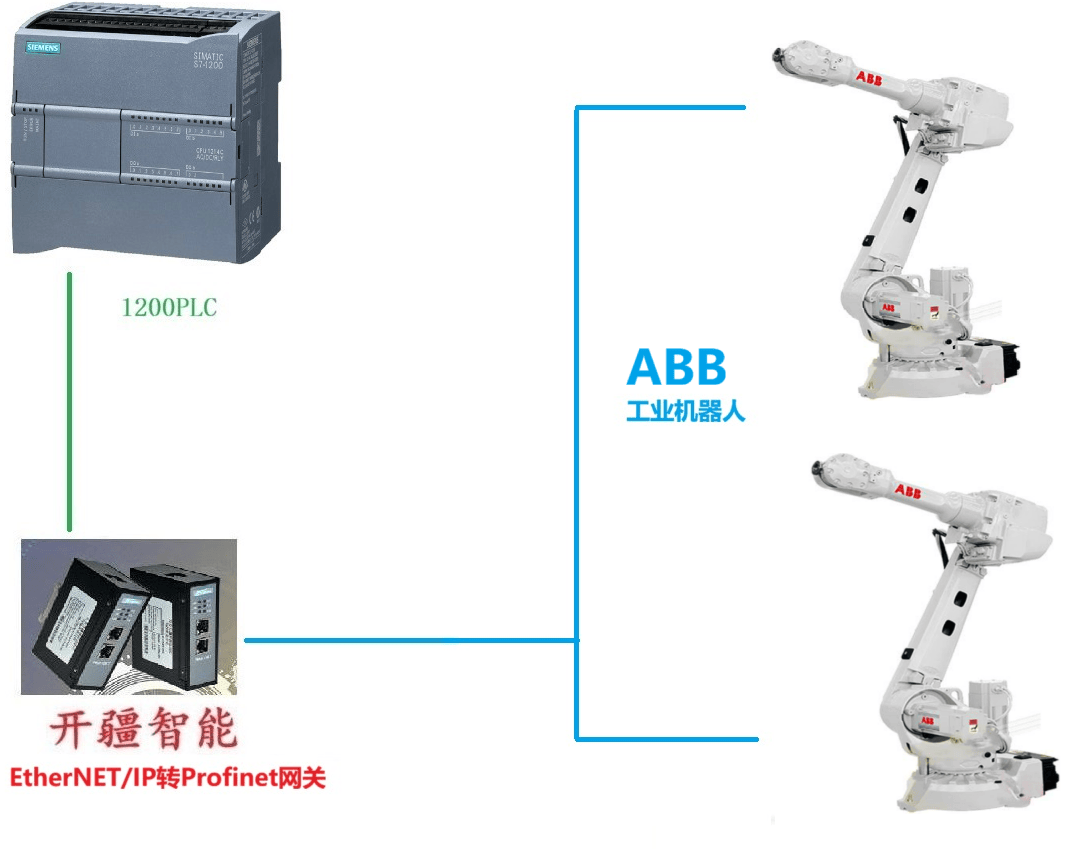
开疆智能Profinet转ethernet网关连接ABB机器人主站配置案例
本案例是ABB机器人作为Ethernet/IP主站连接作为Ethernet从站的网关,并由网关将数据转换成Profinet协议并被西门子PLC读写。
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升
近年来国家陆续出台相关机器人的发展规划,推进机器人产业创新。在工业、汽车制造、消费电子、新能源等众多领域中,工业机器人的应用大幅度增加,包括

工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
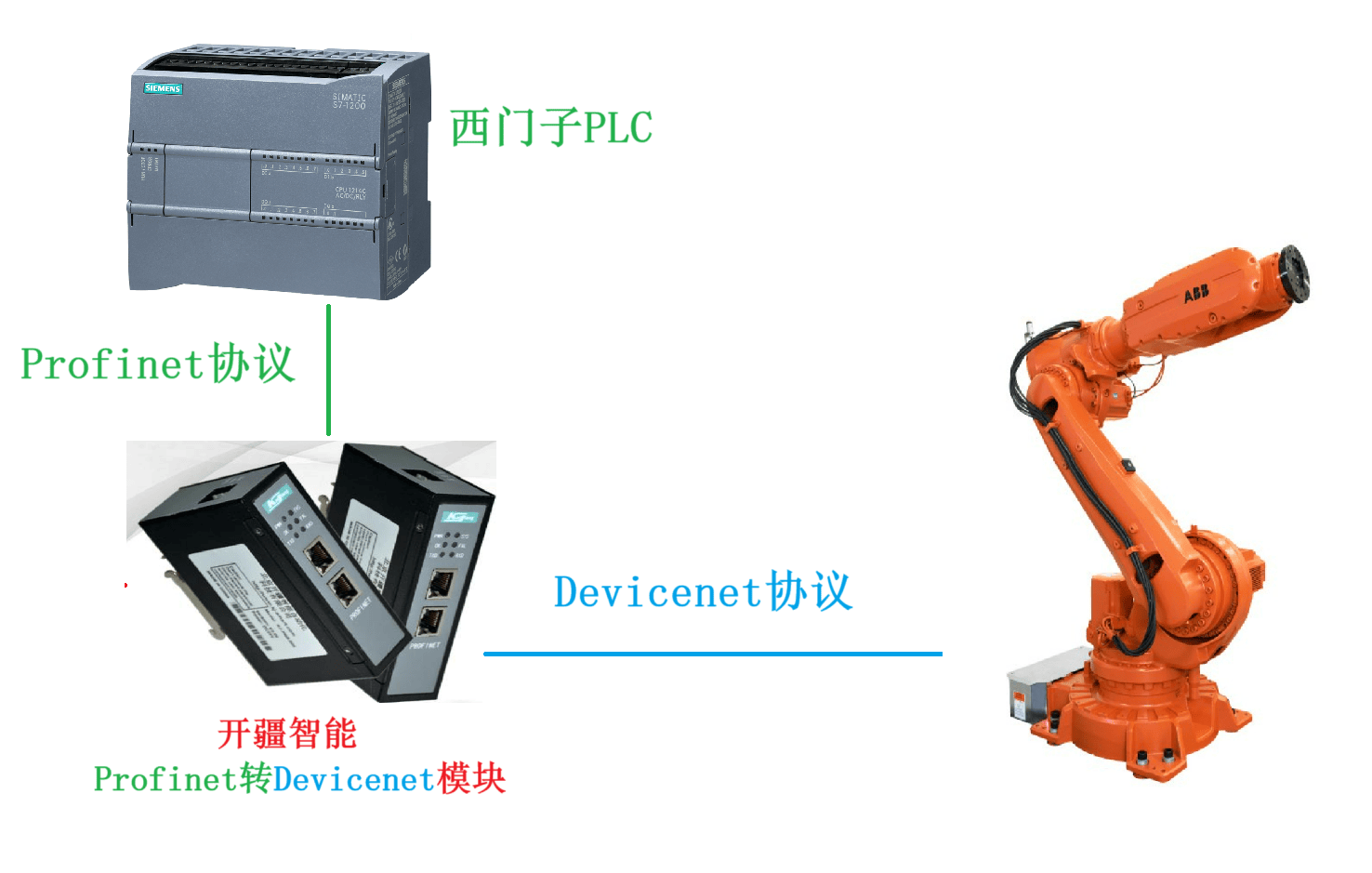
开疆智能Profinet转Devicenet网关连接ABB机器人配置案例
本案例是西门子PLC通过开疆智能研发的Profinet转Devicenet网关连接ABB机器人,网关作为Devicenet从站,ABB机器人作为主站进行通讯。具体步骤如下。
开疆智能ModbusTCP转Devicenet网关连接三菱PLC与ABB机器人配置案例
本案例是三菱PLC通过开疆智能ModbusTCP转Devicenet网关连接ABB机器人的配置案例,具体分为三部分设置,分别为三菱PLC设置,ModbusTCP转Devicenet网关的配置

开疆智能ModbusTCP转Devicenet网关连接ABB机器人配置案例
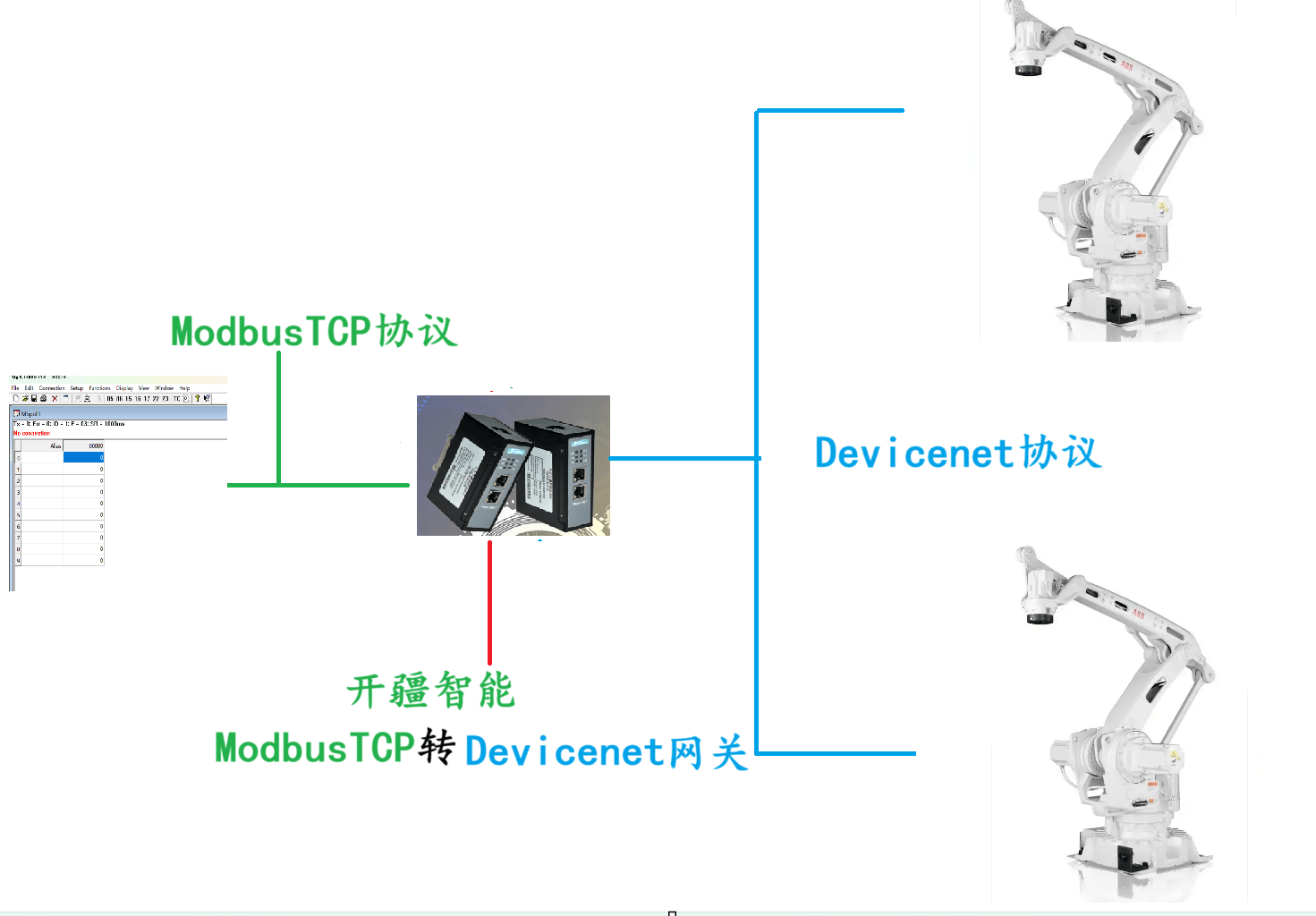
本案例是模拟ModbusTCP主站软件通过开疆智能ModbusTCP转Devicenet网关连接ABB机器人的配置案例,具体过程如下。 配置过程 A
工业通信界的“月老”:CC\\-Link IE和DeviceNet如何牵起机器人的“红线”
机器人的“姻缘簿”上,它们竟成了最佳“CP”,联手解决设备通信难题。
耐达讯通信技术CC-Link IE基于以太网,擅长快速处理海量数据,就像工业界的“闪电快递员”;DeviceNet网关作为现场总线
发表于 06-12 14:35
工业机器人与协作机器人概念不同
在自动化生产的浪潮中,工业机器人与协作机器人逐渐成为企业提升效率、优化产能的得力助手。但它们并非同一概念,在功能、设计与应用场景上有着显著差异。北京沃华慧通测控有限公司凭借深厚的技术沉淀,为不同需求的企业提供适配的

开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例
本案例是通过开疆智能Profinet转ModbusTCP网关将西门子PLC与ABB机器人进行通讯 因西门子PLC采用Profinet协议,而ABB机器人采用的是ModbusTCP通讯。

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备了多种传感器
发表于 05-10 18:26



评论