 直播预告 | 挑战高精度:基于睿擎EtherCAT主站实现双电机同轴同步
直播预告 | 挑战高精度:基于睿擎EtherCAT主站实现双电机同轴同步

在精密装配、高动态物料传送等工业场景中,您是否曾面临这样的挑战:
两个需要严格同步的轴,因独立控制产生的微小相位差,导致产品错位或机械振动?
期望一种更直接、可靠的方式,来实现如“镜像”般精准的协同运动?
如果这是您正在解决的问题,那么1月7日(周三)晚8点的这场直播,将是您不可错过的技术实战。
▎ 直播信息
主题:EtherCAT双电机同轴同步控制
时间:2026年1月7日(周三)20:00
主讲人:睿擎平台资深工程师
预约方式:

▎ 直播主题:EtherCAT双电机同轴同步控制
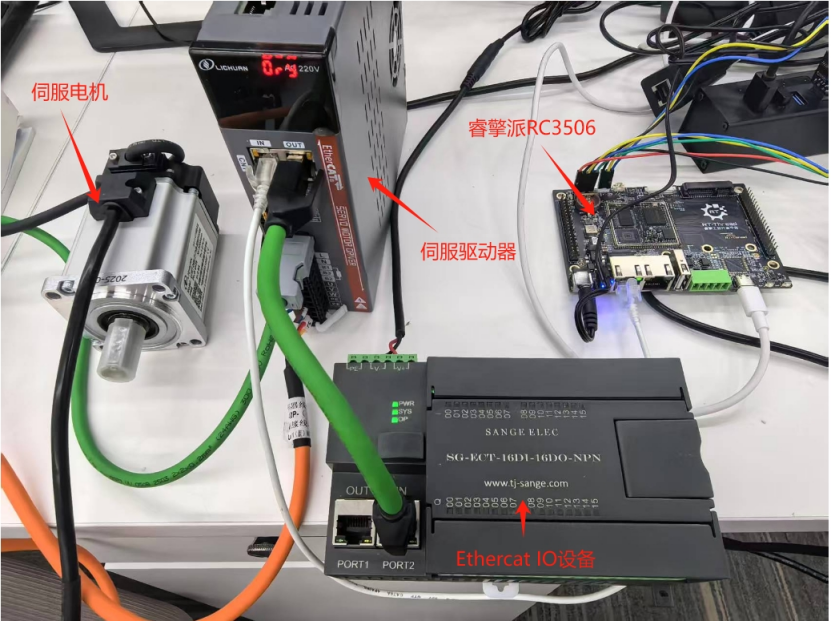
我们将首次在线演示一个极具代表性的高阶应用场景:基于睿擎EtherCAT主站,让两个通过联轴器物理对接的伺服电机,实现精准的反向同步运转。
您将看到一个直观的“机械芭蕾”——两台电机在指令下毫秒间实现速度同步、方向相反,并在运行中实时响应速度调节指令。这不仅是性能演示,更是工业级多轴协同控制的核心能力验证。
▎ 技术亮点:为何这值得关注?
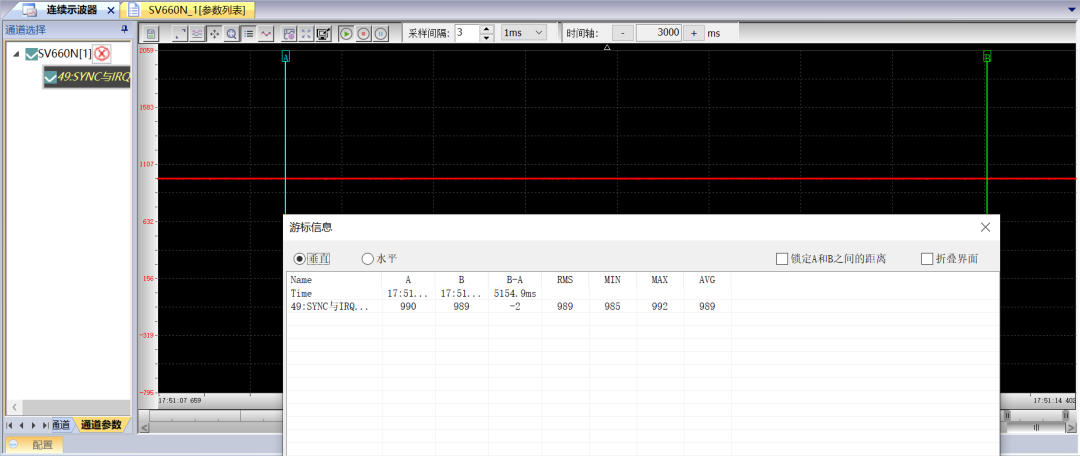
1.毫秒级同步精度:依托EtherCAT分布式时钟(DC)和硬实时内核,确保控制指令的精准下发与执行,消除累积误差。
2.动态实时调控:直播中将演示不停止运动,在线实时修改速度指令,并一键切换运转方向,展现控制系统的灵活性与高响应性。
3.全闭环控制实践:从上层位置指令,深入伺服内部的位置环、速度环、转矩环(三环)控制逻辑,解析高精度同步的底层原理。
▎ 核心知识点:您将系统掌握
●同步控制算法核心:深入讲解双电机位置同步算法,以及在实际硬件(如“一拖二”驱动器)上的应用与配置。
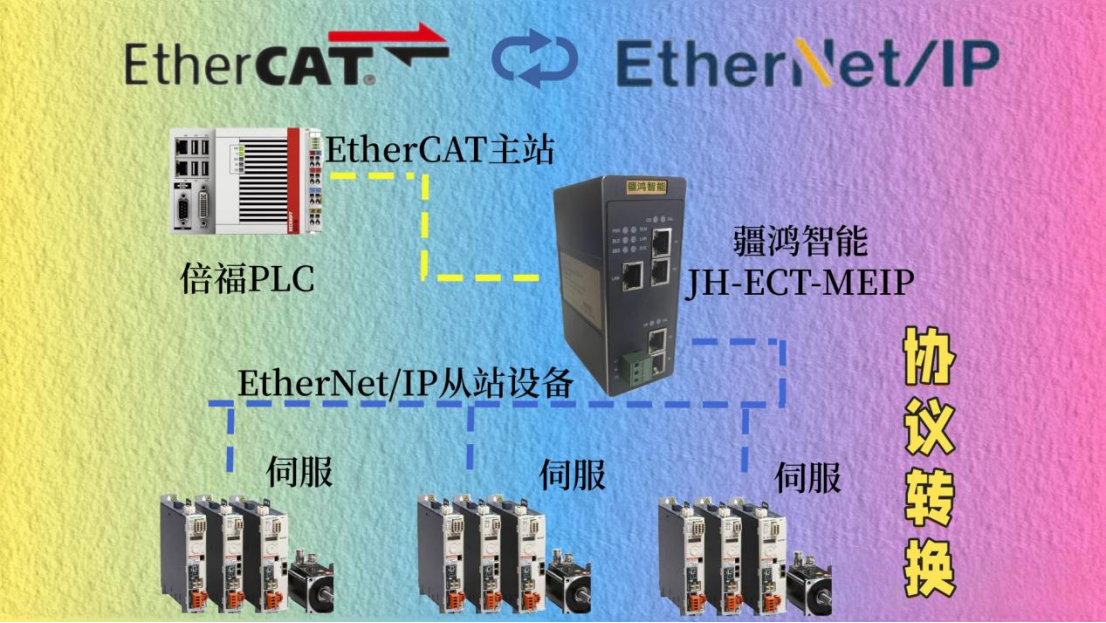
●多轴协同架构:剖析双伺服驱动器协同控制的系统架构与通信调度。
●从理论到信号的完整链路:理解从基于位置模式的精准控制指令,到最终电机响应的完整数据流与控制闭环。
▎ 适合谁观看?
●正在评估或使用EtherCAT进行多轴同步项目的技术负责人。
●希望深入理解伺服三环控制与多轴协同算法的技术研究者。
●任何希望提升工业运动控制系统设计能力的朋友。
这不仅仅是一场演示,更是一次对系统控制精度、实时性和稳定性的深度剖析。如果您希望将设备的多轴同步性能提升至新的水平,1月7日周三晚8点,直播间为您揭示关键实现路径。
-
电机
+关注
关注
145文章
9693浏览量
154731 -
ethercat
+关注
关注
20文章
1573浏览量
46041
发布评论请先 登录
直播预告 | 睿擎派 3562 NullClaw 系统开发实战:把 AI 助手塞进工业开发板

睿擎3562 EtherCAT主站实践

直播预告 | 睿擎平台AMP混合部署:你的Qt界面如何“指挥”底层电机?
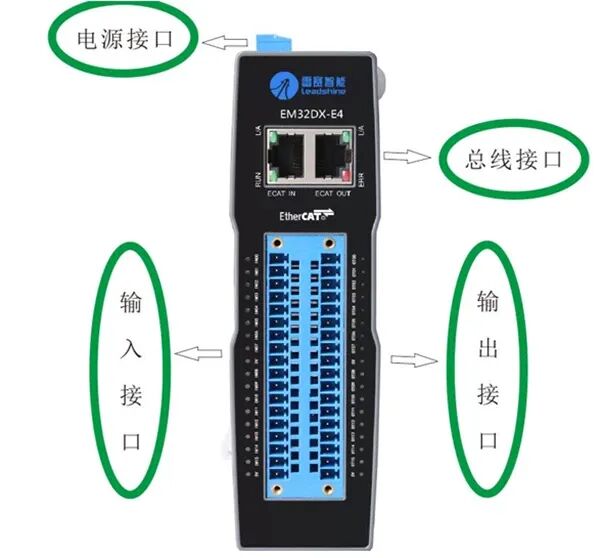
【睿擎派】EtherCAT总线之IO模块读写
深度解析 | 低抖动高精度EtherCAT多轴控制的实现与实践案例
【直播预告】下周三晚8点|睿擎物联网实战:从传感器采集到MQTT上云全流程解析

【直播预告】下周三晚8点|睿擎文件系统实战:从开发到发布全流程解析
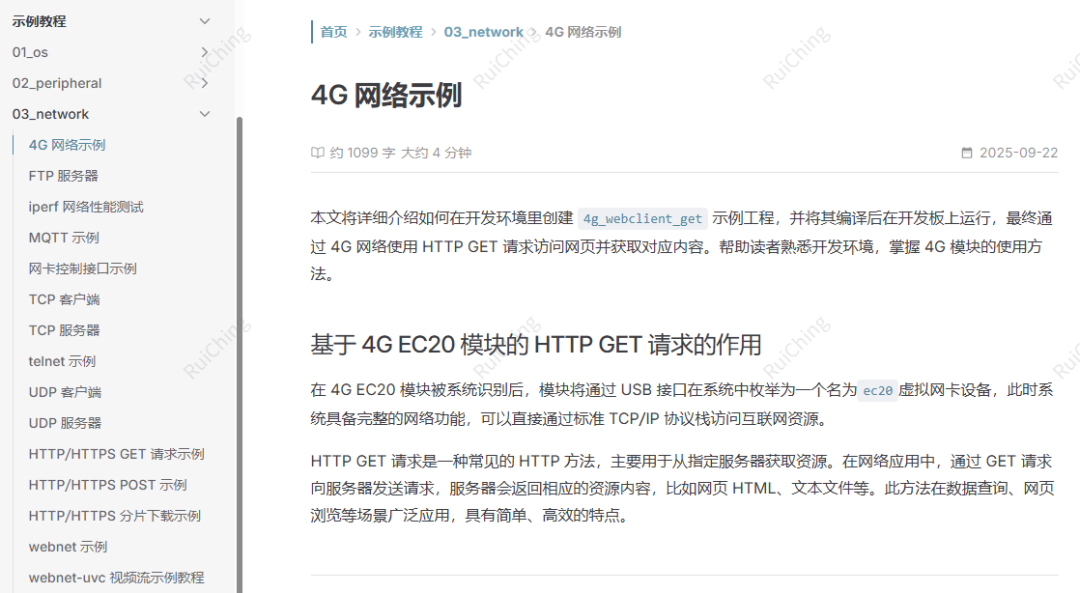
【直播预告】10月29日 周三 晚8点 |睿擎网络开发实战:从配置到应用,掌握工业级网络开发精髓!| 直播预告
【直播预告】周三晚8点|睿擎网络开发实战:从配置到应用,掌握工业级网络开发精髓!| 直播预告
睿擎EtherCAT多轴控制技术:如何实现低抖动高精度运动控制 | 深度解析
【直播预告】10月14日 本周二晚8点|睿擎平台首场实战直播:从快速上手到实现远程监控网关

【直播预告】10月14日晚8点|睿擎平台首场实战直播:从快速上手到实现远程监控网关
如何实现EtherCAT与电机控制之间的同步处理

多色印刷机的高精度同步控制:EtherCAT与EtherNet/IP的集成应用
基于睿擎派轻松玩转EtherCAT主站,实现电机精确控制



评论