 睿擎3562 EtherCAT主站实践
睿擎3562 EtherCAT主站实践

1引言
在工业自动化领域,EtherCAT(Ethernetfor Control AutomationTechnology)已经成为最具影响力的实时工业以太网技术之一。它以其超高的通信效率、灵活的拓扑结构和低廉的成本优势,广泛应用于工业机器人、CNC机床、自动化产线等场景。
睿擎派3562作为一款基于瑞芯微RK3562处理器的高性能开发板,内置了EtherCAT主站功能,配合AMP混合部署模式,可以实现高性能的工业控制应用。本文将带您深入了解睿擎派3562的EtherCAT主站功能,掌握从硬件连接到软件配置的全流程。
2EtherCAT技术简介
EtherCAT是一种基于以太网的实时工业现场总线技术,具有以下特点:
●高速通信:采用“processingon thefly”技术,数据在传输过程中被从站设备直接处理,延迟极低
●灵活拓扑:支持线性、树形、环形等多种拓扑结构,最大可连接65535个从站
●成本优势:使用标准以太网硬件,无需专用网卡

3睿擎派3562EtherCAT主站特性
睿擎派3562开发板内置了完整的EtherCAT主站功能,支持多种运行模式:
●CSP(周期同步位置模式):适用于需要精确位置控制的场景,如工业机器人
●CSV(周期同步速度模式):适用于速度控制场景
●CST(周期同步力矩模式):适用于力矩控制场景


3.1核心技术参数
睿擎派3562的EtherCAT主站具有以下技术特点:
●通信周期:主循环支持250us,满足高精度控制需求
●分布式时钟:支持DC同步,实现微秒级同步精度
●多从站支持:可同时连接和控制多个EtherCAT从站设备
●CIa402协议:支持标准伺服电机控制协议,兼容主流伺服驱动器
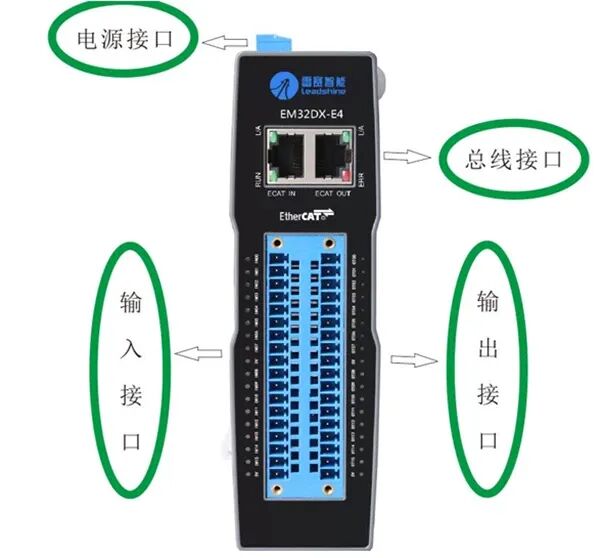
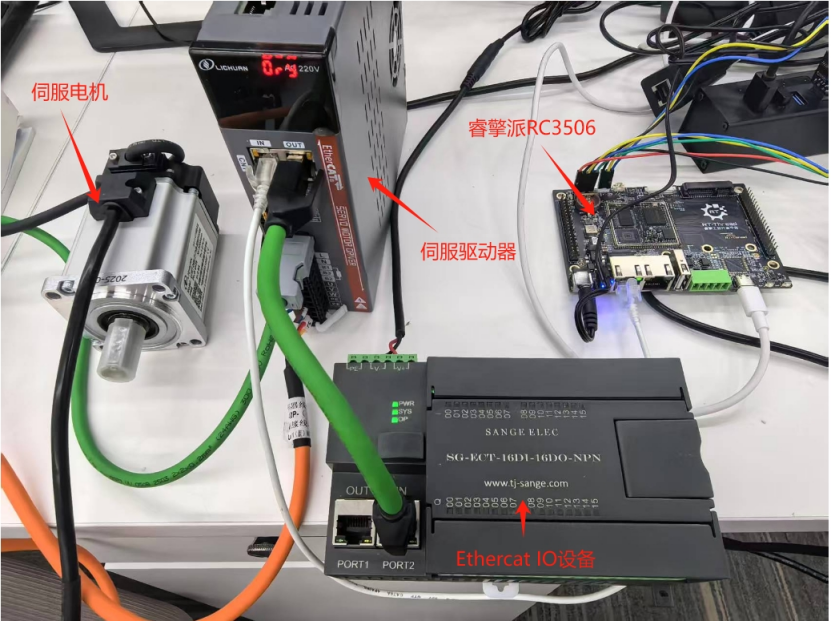
4硬件连接
EtherCAT通信需要使用网线将睿擎派3562与EtherCAT从站设备(如伺服驱动器、IO模块等)连接。
典型的连接拓扑如下:
1.将睿擎派3562的网口通过网线连接到第一个EtherCAT从站的EtherCATIN接口
2.从第一个从站的EtherCATOUT接口连接到下一个从站的EtherCATIN接口
3.依此类推,形成链式拓扑结构

5软件配置与实现
5.11.创建工程
在RuiChingStudio中创建新的工程,选择EtherCAT主站CSP示例模板。实际工程结构如下:

5.22.主站初始化配置
工程中使用的EtherCAT主站配置参数如下:

5.33.PDO映射配置
CSP模式使用的PDO映射包括控制字、目标位置、目标速度、目标力矩等参数:

5.44.CSP模式控制实现
实际工程中实现了完整的CSP位置控制,包括伺服使能、模式切换和位置控制:


5.55.位置控制命令
工程提供了MSH命令行接口,方便调试和控制:
命令 | 功能 |
ect_csp | 启动EtherCAT主站,进入CSP模式 |
motor_run | 启动电机运行 |
motor_stop | 停止电机 |
motor_dir 0/1 | 设置电机旋转方向(0-反向,1-正向) |

6典型应用场景
6.11.工业机器人
EtherCAT的高精度同步特性使其非常适合多轴工业机器人控制。睿擎派3562可以同时控制多个伺服电机,实现精确的位置和速度控制。
6.22.CNC数控机床
在CNC机床应用中,EtherCAT可以确保多轴运动的严格同步,保证加工精度。
6.33.自动化产线
EtherCAT的灵活拓扑和高速通信特性,使其成为自动化产线的理想选择,可以连接大量的IO模块和执行器。

7常见问题与解决方案
7.11.从站无法识别
●问题:EtherCAT从站设备无法被主站识别
●解决方案:
undefined检查网线连接是否正确
undefined确认从站设备的EtherCATIN/OUT接口方向
undefined检查从站设备的EtherCAT配置是否正确
7.22.通信不稳定
●问题:EtherCAT通信出现丢帧或延迟
●解决方案:
undefined检查网线质量,建议使用工业级网线
undefined确保电源供应稳定
undefined减少从站数量或降低通信周期
7.33.同步精度不足
●问题:多轴同步精度达不到要求
●解决方案:
undefined启用分布式时钟(DC)同步功能
undefined优化控制周期参数
undefined检查从站设备的同步能力
8总结
睿擎派3562内置的EtherCAT主站功能为工业自动化应用提供了强大的支持。配合AMP混合部署模式(Ubuntu+RT-Thread),可以在Linux系统上运行复杂的控制算法,同时利用RT-Thread的实时性保证控制指令的精确执行。
无论是工业机器人、CNC机床还是自动化产线,睿擎派3562都能提供稳定可靠的EtherCAT通信解决方案。如果您正在寻找一款支持EtherCAT的国产开发板,睿擎派3562绝对值得考虑。
-
工业自动化
+关注
关注
17文章
3242浏览量
70081 -
主站
+关注
关注
0文章
53浏览量
8218 -
ethercat
+关注
关注
20文章
1582浏览量
46228
发布评论请先 登录
【睿擎派】EtherCAT总线之IO模块读写
睿擎派3562快速上手体验

基于全志T507-H的Igh EtherCAT主站案例分享
深度解析 | 低抖动高精度EtherCAT多轴控制的实现与实践案例
基于赛灵思FPGA的EtherCAT主站运动控制
找开发EtherCat主站的设计人员
开源!ZYNQ IgH EtherCAT主站方案分享
EtherCAT主站方案之横向比较

基于睿擎派轻松玩转EtherCAT主站,实现电机精确控制
睿擎平台v1.7.2版本正式发布|技术集结

直播预告 | 睿擎派 3562 NullClaw 系统开发实战:把 AI 助手塞进工业开发板

睿擎派 3562 整包固件制作指南




评论