 全固态激光雷达现在发展到什么阶段了?
全固态激光雷达现在发展到什么阶段了?

[首发于智驾最前沿微信公众号]最近有一位小伙伴在评论区留言,让我聊聊全固态激光雷达的发展。其实全固态激光雷达作为近几年激光雷达技术演进中的一个重要方向,确实被反复提起。很多时候我们看到的全固态激光雷达只是“体积更小”“成本更低”“更适合上车”这些结论式说法,却很少有人耐心拆解它到底“固态”在什么地方,和我们熟悉的机械式、半固态激光雷达本质差别在哪,现在发展到了哪一步,又到底解决了哪些问题、还没解决哪些问题。今天就带大家来聊聊这些内容。

什么是激光雷达?
在聊全固态激光雷达之前,我们还是要先理解什么是激光雷达。激光雷达,全称是LiDAR(Light Detection and Ranging),中文顾名思义就是“光探测与测距”。它就是发出一束激光,等激光束遇到物体反射回来后,测量往返时间,再乘以光速就得到目标物体的距离。
图片源自:网络
这种基本的测距方式叫飞行时间法(Time-of-Flight,ToF),是激光雷达工作的底层逻辑。通过高速发射大量激光脉冲,再把每次返回的距离和角度信息组合起来,就能构建一个三维空间的点云图,以展现周围环境的形状、位置和尺寸。
激光雷达的优势是可以生成三维感知,这种能力恰好是摄像头和毫米波雷达难以同时兼顾的。摄像头有颜色和纹理信息但难以准确测距,毫米波雷达能测距和速度但分辨率有限,而激光雷达则能较高精度地获得环境距离信息,这使得它在自动驾驶、机器人、自主导航甚至地形测绘中不可或缺。
早期的激光雷达多采用机械旋转扫描的方式,通过电机、转台等机械结构让激光束“扫过”整个周围空间。这样的设计能覆盖360°的视角,并得到密集的点云数据,但体积大、成本高且有机械磨损问题,不利于量产。正是在这种背景下,人们开始探索一种新的激光雷达方案,即半固态激光雷达。
所谓“半固态”,指的是它不像传统机械式激光雷达那样整个雷达都要机械旋转,而是把真正发射和接收光线的核心模块固定住,只让一些小的部件做机械运动。这样的设计使得它的运动部件相比传统机械雷达少得多,所以结构更简单、更稳定。
现阶段,又有技术方案提出,是否可以进一步减少半固态激光雷达中的可动机械部件,让激光雷达直接全固态?

什么叫“全固态激光雷达”?
全固态,顾名思义,就是没有任何可动的机械部件。在激光雷达里,这意味着不用转动电机、也不用微振镜等传统移动元件来改变激光发射方向,而是通过电子手段或者特殊光学结构来控制光束的发射与接收。这样可以让激光雷达更小、更可靠、更易大规模生产、成本更低。之所以不断追求固态激光雷达,是因为机械激光雷达存在如下问题。
机械件耐久性差,特别是在车用环境下,需要经受温度、震动、灰尘等考验。
复杂的机械结构造价高,量产难度大,不利于汽车等大规模行业装配。
机械部分速度有限,无法做到像电子扫描那样极高的刷新频率。
全固态激光雷达,要求激光束从发射到扫描再到接收全部靠电子和光学结构实现,而无需任何旋转、摆动等物理运动。这种方案不但小型化程度高,而且长期稳定性和适应性也显著增强。

全固态激光雷达的技术路径与原理
当前全固态方案的实现路径主要有两种,即光学相控阵(Optical Phased Array,OPA)和Flash激光雷达(Flash LiDAR),每种方案的原理不同,适用场景也各有优势和限制。
1)光学相控阵(OPA):无需机械扫描的电子光束控制
在机械激光雷达或半固态激光雷达中,想让激光束扫过空间必须靠旋转或摆动镜面。OPA的设计理念就完全不同,它采用一组多个光发射元件组成“阵列”,通过精确调节每个发射单元发出的光波相位差来控制光束的方向。这种原理与雷达领域的相控阵雷达类似,只不过在激光雷达里处理的是更高频率的光波,而不是射频波。
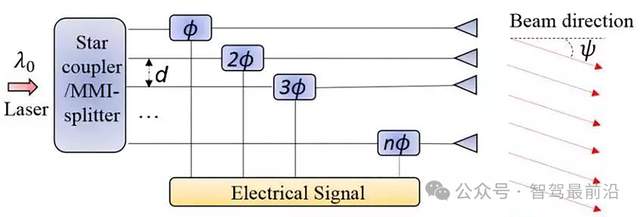
光控相控阵扫描基本原理示意图,图片源自:网络
更通俗理解下这个方案,就是将一排排相干激光单元通过电信号协同工作,通过调整各个单元发出的光波叠加的相位关系,就可以形成一个指向性很强的光束,这一过程不需要任何机械动作。只要改变控制信号,就能让这个光束指向不同方向,达到扫描的目的。
OPA方案由于没有机械运动部件,可靠性高、寿命长;扫描速度由于仅受电子信号控制限制,因此可以非常快。此外,这一方案控制精度高,可以实现非常细致的点云分辨率。
但是在OPA的方案中,光波的波长极短(一般在1微米左右),要让相控阵单元有效工作,它们的尺寸必须非常小,甚至要控制在波长的一半以内,这对制造工艺提出了极高的要求。因此想让其规模化生产面临一定的难度。
OPA在实现大视场(FieldofView)时还容易产生所谓的旁瓣问题,即除了主束以外会有能量泄露到其他方向,这会影响扫描质量。如何同时提升视场和点云密度,是当前技术攻关的重要方向之一。
2)Flash LiDAR:像照相机一样
Flash LiDAR的工作方式更接近相机拍照。系统在一个极短的时间内同时发出一束覆盖整个视场的宽角激光脉冲,而不是把激光聚焦成一条细束再一行一行地扫过去。激光照射到场景中的物体后,反射光会从不同方向返回,接收端不再依赖单点探测器,而是使用一个二维探测器阵列,让阵列中的每一个像素分别对应视场中的一个方向。这样一来,每个像素都能独立记录该方向上反射光的飞行时间和信号强度,从而直接得到一整幅深度图。
正因为发射和接收都是“同时完成”的,Flash LiDAR和传统机械扫描式激光雷达在工作逻辑上也有着本质区别。机械扫描需要通过转动或摆动光束,逐点、逐线地完成空间采样,而Flash LiDAR则是在一次发射中完成整个视场的感知,没有扫描过程,也不存在扫描顺序的问题。
这种一次性成像的方式,使得它的结构极其简单,没有任何扫描部件;因为同时完成整个视野的探测,所以它的刷新速度非常快;对于短距离应用和高动态场合,它能提供非常低延迟的感知数据。
因为Flash LiDAR是在同一时间把激光铺满整个视场,激光能量不再集中在某一个方向,而是被均摊到所有角度上。在车规安全标准的限制下,单次发射的总能量不能无限提高,这就导致分配到每个方向的有效能量本身就不高,反射回来的信号自然也会变弱。结果就是,Flash LiDAR在远距离探测和精细分辨率上会受到限制。相比之下,传统机械式激光雷达,或者采用OPA的固态方案,可以把激光能量集中到某一个方向逐点扫描,在同样的安全约束下,更容易把远处目标“打亮”,因此在远距探测能力上更有优势。
为了弥补这种先天的能量分散问题,Flash LiDAR在接收端发展出了不同的技术实现路径。其中一种思路是使用灵敏度极高的SPAD单光子雪崩二极管阵列,让系统具备单光子级别的探测能力,即使返回信号非常微弱,也有机会被捕捉到,这对低信噪比环境下的感知很有帮助。
另一种思路则是基于CMOS传感器阵列,结合飞行时间测距逻辑来获取深度信息,这类方案在工艺成熟度和成本控制上更有优势,但在极远距离和弱信号场景下,对系统设计和算法提出了更高要求。

全固态激光雷达的发展现状
2025年,固态激光雷达已从早期概念验证和小批量试产阶段逐步进入更广泛的工程应用阶段。很多传感器厂商和汽车主机厂都已推出不同形式的固态激光雷达产品,部分产品已经实现了量产并装配在量产车型上。
图片源自:网络
但是,目前市场上的激光雷达产品大多属于混合固态或以MEMS微振镜为代表的半固态方案,真正的OPA和Flash纯固态方案在性能稳定性、量产能力方面仍难以达到要求。尽管如此,行业对OPA的全固态激光雷达前景依然高度关注,因为它代表着未来有望实现的芯片级激光雷达,这种形式的LiDAR如果成熟下来,将真正实现低成本、高可靠和大规模量产的目标。

最后的话
全固态激光雷达是一种真正意义上把激光雷达系统从机械结构中解放出来的新型传感器。它无需可动部件,通过电子控制和光学设计实现环境扫描,具有体积小、可靠性高、易量产的显著优势。
目前,虽然目前全固态激光雷达尚未全面取代机械式产品,但它在量产应用、成本下降和性能优化方面优势明显。未来随着制造工艺成熟、集成度提升及算法优化,全固态LiDAR或将成为自动驾驶等领域最核心的三维感知组件之一。
审核编辑 黄宇
-
激光雷达
+关注
关注
983文章
4607浏览量
197432
发布评论请先 登录
科研教育 “慧眼” 升级!全固态面阵激光雷达WS-30PCD-ET3,赋能教研创新与人才培养

万线激光雷达是依托什么技术实现的?

固态激光雷达参数以及避障视频
30dB超标?固态激光雷达EMI整改全案解析

L4无人驾驶全面升级,主雷达+补盲雷达缘何成为行业标配?

速腾聚创获千线级激光雷达组合百度独家定点,Robotaxi行业全面拥抱千线级激光雷达

调频连续波(FMCW)为什么是自动驾驶激光雷达的未来?

ToF 技术再进化:面阵固态激光雷达在各环境中的可靠性

扫描、测距新方案亮相,固态激光雷达再进一步

全固态激光雷达为什么迟迟未来?其技术难点是什么?
速腾聚创激光雷达全球销量破百万,市占率26%居首

SPAD席卷车载激光雷达市场
机械、半固态、全固态激光雷达有何区别?谁更适合自动驾驶?




评论