 Ethernet ip转SPI嵌入式板卡-让机器人与单片机互相联动
Ethernet ip转SPI嵌入式板卡-让机器人与单片机互相联动

当发那科机器人作为EtherNet/IP主站,与“EIP转SPI嵌入式板卡”(作为EIP从站)通信时,核心是通过机器人配置工具(示教器+RobotStudio)完成对从站的发现、数据映射,并编写逻辑实现对SPI设备的控制与数据采集。以下是具体配置步骤,涵盖硬件连接、机器人主站设置、从站配置及通信验证。
配置IP地址(关键!需同网段)
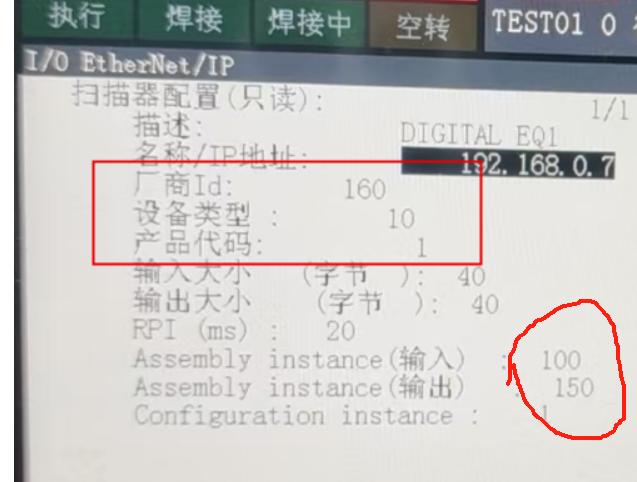
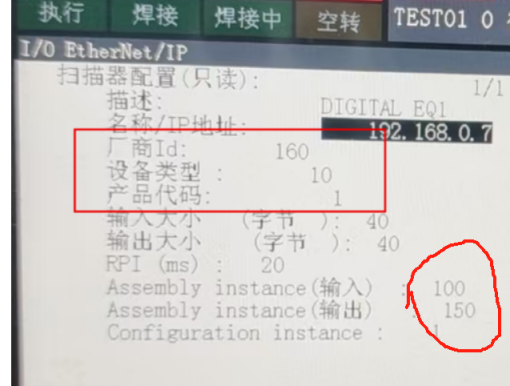
机器人(主站)IP:设置为192.168.0.7,子网掩码255.255.255.0。
嵌入式板卡(从站)IP:
通过板卡配置工具(如串口调试助手)设置为192.168.0.20,子网掩码255.255.255.0(与主站同网段)。
嵌入式板卡(EIP从站)配置
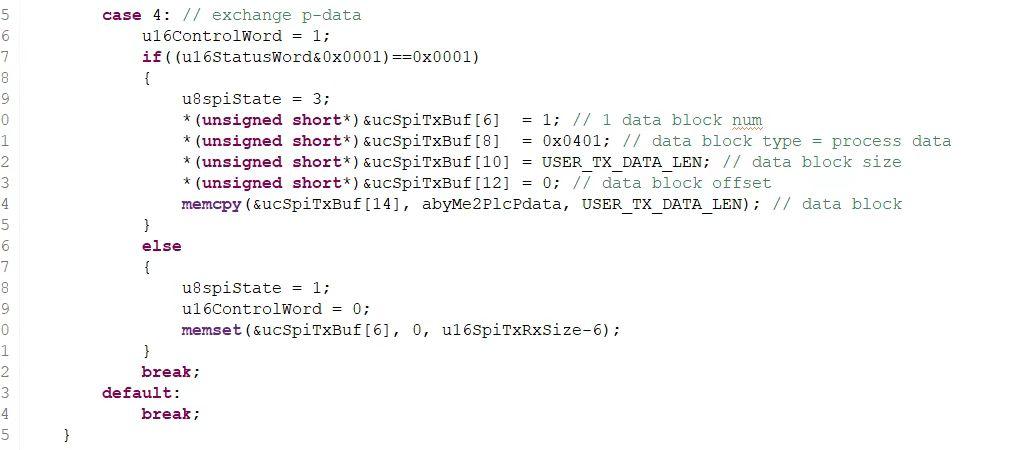
板卡需作为EIP从站,定义与主站交互的数据格式(输入/输出数据区),并实现SPI与EIP的协议转换。
配置从站基础参数(板卡侧)
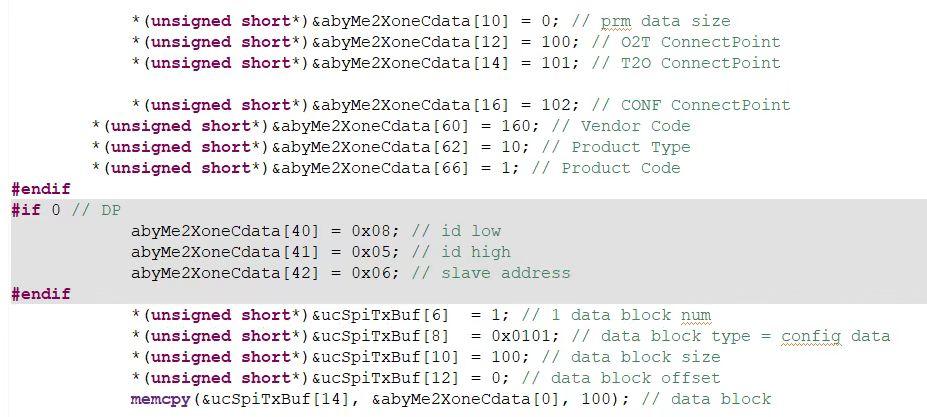
通过板卡开发工具配置EIP从站信息(需与机器人主站匹配):
设备名称(DeviceName):SPI_Converter_Slave(唯一标识,机器人需通过此名称发现设备)。
供应商ID(VendorID):自定义(如0x0001,需记录,机器人配置时需填写)。
产品代码(ProductCode):自定义(如0x0002)。
输入/输出数据长度:根据SPI外设需求定义(如输出40字节(机器人→板卡的控制指令)、输入40字节(板卡→机器人的传感器数据)。
通信验证与调试
基础连接验证
机器人侧:在RobotStudio的【EtherNet/IP诊断】中,查看从站状态为“已连接”,输入/输出数据区显示“正常更新”。
板卡侧:通过逻辑分析仪抓取SPI总线,验证当机器人发送读指令时,板卡是否正确向SPI设备发送地址和读取数据。
数据交互测试
运行“读取传感器”TP程序,在示教器查看显示的温度值,与SPI传感器手册的理论值对比(如环境温度25℃,显示值应接近)。
运行“控制继电器”程序,观察SPI继电器是否吸合,同时在RobotStudio监控I:100(状态码)是否为0x00。
通过以上步骤,发那科机器人可作为EtherNet/IP主站,通过嵌入式板卡实现对SPI设备的远程控制与数据采集,适用于机器人工作站中SPI传感器/执行器的集成场景(如物料检测、辅助设备控制)。
审核编辑 黄宇
-
嵌入式
+关注
关注
5186文章
20143浏览量
328646 -
机器人
+关注
关注
213文章
30578浏览量
219432 -
Ethernet IP
+关注
关注
0文章
54浏览量
5718
发布评论请先 登录
嵌入式系统的定义和应用领域
单片机和嵌入式,到底是什么关系?

西门子PLC连接嵌入式板卡Profinet转SPI联动单片机通讯
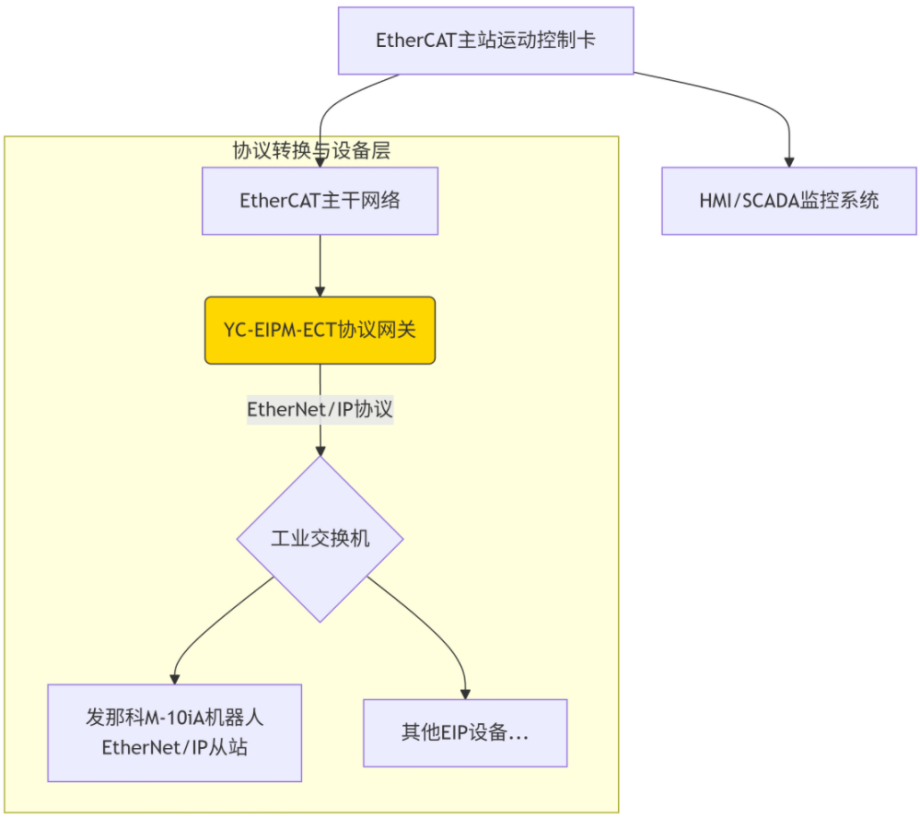
发那科机器人借助EtherNet/IP转EtherCAT网关,实现与EtherCAT运动卡的高效互联案例
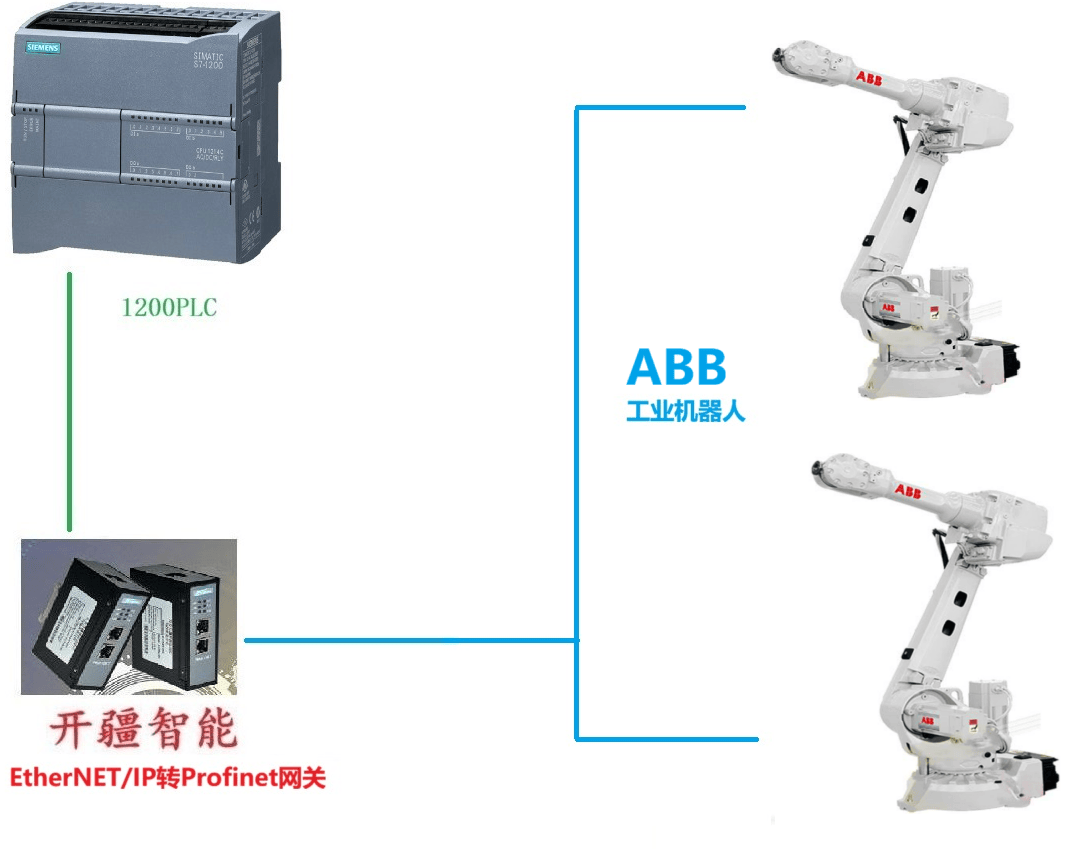
开疆智能Profinet转ethernet网关连接ABB机器人主站配置案例
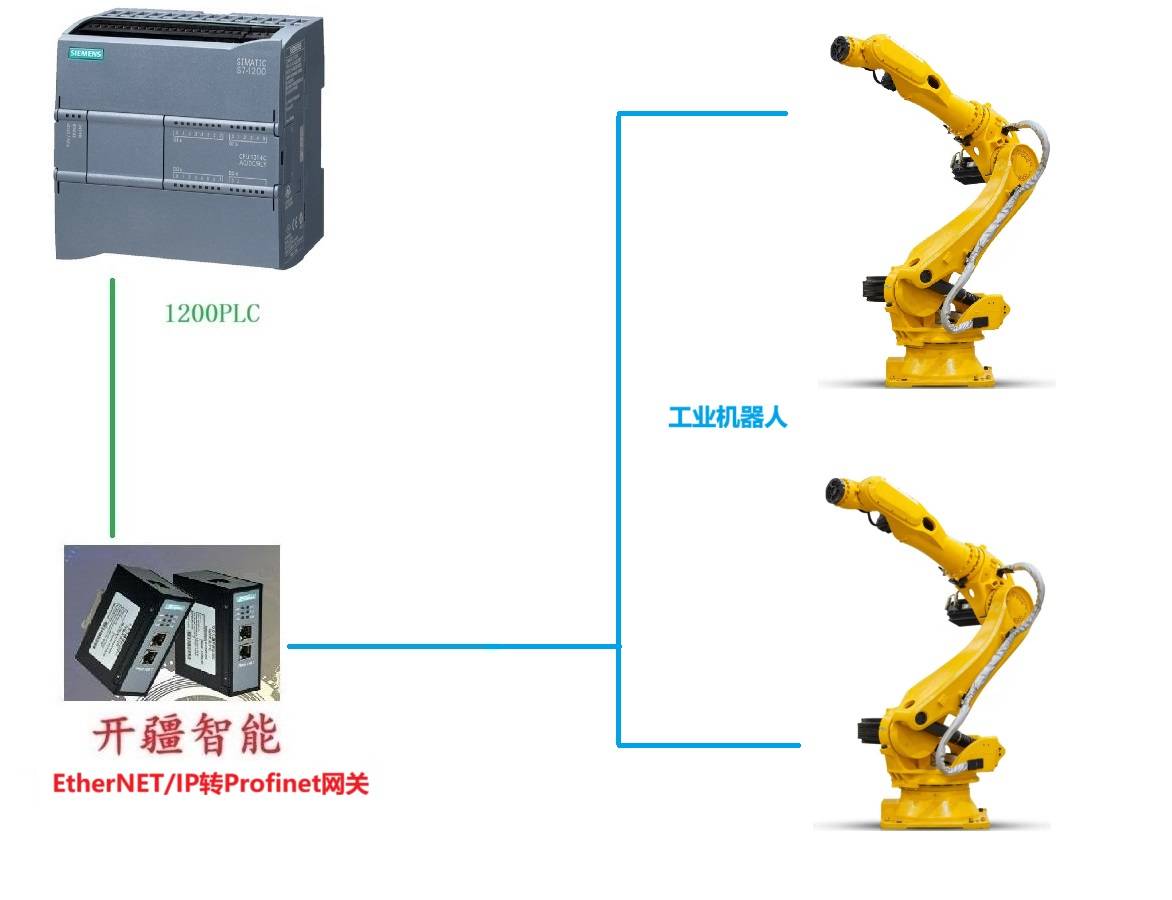
开疆智能Profinet转EtherNET/IP网关连接机器人配置案例
Linux嵌入式和单片机嵌入式的区别?
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信

喷涂黑科技!Ethernet IP转ModbusTCP网关,让机器人喷涂“指哪打哪”

打通印染车间“神经末梢”:DeviceNet转Ethernet/IP连接机器人的高效方案
EtherNet IP转Profinet网关连接FANUC机器人配置指南(PROFIENT组态篇)

基于RISC-V内核的嵌入式系统在机器人关节控制中的应用研究
EtherCAT转EtherNet/IP实现工控机与机器人设备通讯的配置案例

开疆智能Profinet转EthernetIP从网关连接ABB机器人做EtherNet主配置案例





 工商网监
工商网监
评论