 美科学家打造高度灵活机动的微型软体机器人
美科学家打造高度灵活机动的微型软体机器人

近日,由哈佛大学和波士顿大学工程师组成的研究团队借助一种全新的制造技术打造出了一款高度灵活机动的微型软体机器人。
据介绍,这一过程简称MORPH(气压/液压重构的微流体折叠),它借助软印刷技术首先用硅胶打造出机器人的外形,然后使用激光精细加工技术在机器人身上蚀刻出微型通道。其中一些通道随后借助一项注射诱导自折叠技术进行密封,并使用树脂和紫外线进行愈合,从而形成最终的机器人身体。软体机器人的其他微流体通道仍然处于开放状态,因此机器人的肢体能够借助水或者酒精来驱动并模拟澳大利亚孔雀蜘蛛的表现。这项研究已经发表在了《先进材料》杂志上。
负责人表示,这种MORPH方法能够为研究人员打开软体机器人研究的新领域,尤其是那些依赖于更小体型和更灵活机器人的医学应用,该机器人将带来一种全新的内窥镜检查和显微外科手术。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31768浏览量
224883 -
软体机器人
+关注
关注
1文章
116浏览量
12166
原文标题:科学家打造新型软体机器人
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
安泰电子ATA-2022B高压放大器在磁性软体微机器人中的应用
【概述】 2025年北京理工大学研究团队使用 ATA-2022B高压放大器 ,搭建磁性软体微机器人实验系统。 实验名称: 磁性软体微机器人的运动测试 研究方向: 微纳

从工具智能到 AI 原生验证:徐强教授出任芯华章首席科学家
从工具智能到 AI 原生验证:徐强教授出任芯华章首席科学家 近日,系统级验证 EDA 企业芯华章宣布,香港中文大学计算机科学与工程系教授徐强正式加盟,出任公司首席科学家。徐强教授长期深耕 AI

商汤科技首席科学家林达华荣获第四届中银香港科技创新奖
近日,商汤科技联合创始人兼首席科学家林达华教授,荣获第四届中银香港科技创新奖(人工智能及机器人领域),以表彰其于科研创新及成果转化方面的卓越贡献。
ATA-7030高压放大器在压电软体机器人设计中的应用
实验名称: 压电软体机器人设计 研究方向: 压电软体机器人 实验内容: 通过非对称设计,弛豫铁电聚合物薄膜在电场作用下产生面外弯曲。激光测振仪、信号发生器与功率放大器相结合,对弛豫铁电

广东第一会焦点:华为8800亿+速腾30万机器人激光雷达,双科技龙头亮眼
2月24日,华为董事长梁华在2026广东省高质量发展大会上发表讲话时透露,2025年华为公司销售收入超过8800亿元人民币。深圳市速腾聚创公司董事长兼首席科学家邱纯鑫表示,2025年从打造机器人之眼,到手眼协同具身智能解决方案,

中兴通讯崔丽受邀出席2025腾冲科学家论坛
近日,“2025腾冲科学家论坛”在云南启幕。本届论坛以“科学·AI改变世界”为主题,汇聚包括诺贝尔奖、图灵奖、菲尔兹奖得主在内的国际顶尖科学家,以及百余位两院院士、高校校长、科技精英与产业领袖,共话
高压放大器在介电弹性体软体机器人中的应用
赋予了更多使命,但刚性机器人的高度发展无法满足所有应用需求,脆弱的结构与笨重的体型使得它们的应用受到环境的限制。近年来软体机器人的不断发展使得这一劣势足以弥补,为了满足刚性

软智赋能,功放大有可为!Aigtek安泰电子亮相软体机器人大会!
会议回顾2025年11月14-11月16日,第十届软体机器人大会——基础理论与关键技术研讨暨软体机器人创新设计竞赛于在山东青岛圆满召开。本次大会旨在推动

Aigtek安泰电子诚邀您莅临第十届软体机器人大会!
第十届软体机器人大会——基础理论与关键技术研讨暨软体机器人创新设计竞赛,将于2025年11月14-11月16日在山东青岛召开,本次Aigtek将携最新技术成果与解决方案亮相本次会议,期

国际类脑计算科学家Yulia Sandamirskaya教授加盟时识科技
近日,国际类脑计算与神经形态机器人领域知名科学家Yulia Sandamirskaya 教授,作为科学家顾问正式加入时识科技(SynSense)。
科技感拉满!鲸启智能机器人与无人机联动,闪耀服务世界青年科学家论坛
9 月 20 日,以 “青年,世界科学的未来” 为主题的世界青年科学家论坛(南京)在江北新区启幕。20 余位诺贝尔奖得主、海内外院士,超百位国际国内青年科学家及产业代表齐聚,围绕前沿科技展
复合机器人:解锁实验室自动化的高精度智能引擎
富唯智能将持续深耕实验室场景,以更智能、更灵活、更安全的复合机器人解决方案,推动科研无人化进程,助力科学家探索未知疆界,释放创新潜能。
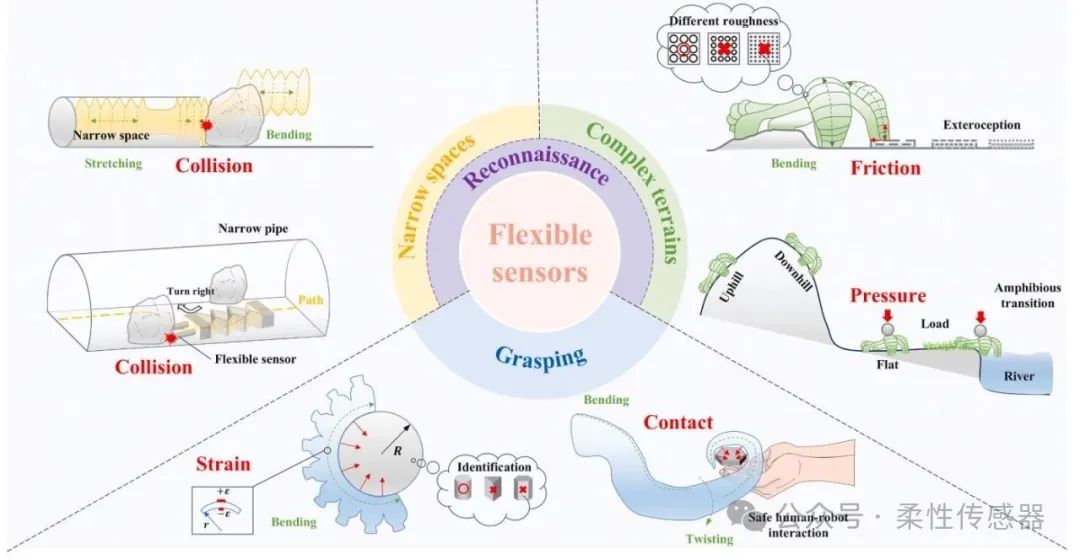
南京理工大学:研发柔性机械传感器表界面微结构-面向软体机器人
传感器仍然是一个重大挑战。一种有效的方法是将软机器人的连续变形转换为离散表示,这使科学家们能够更好地理解变形过程,并明确表面和界面对传感器性能的影响。因此,可以使用智能算法进一步优化传感器的数量和排列,从而提高
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22




评论