 EtherCAT 技术前瞻:人形机器人通信的新选择!
EtherCAT 技术前瞻:人形机器人通信的新选择!

近年来,随着人形机器人逐渐从实验室走向实用化,其相关新闻频繁占据技术头条。从高校比赛、企业研发推进到亮相春晚舞台,从仿生步态研究、智能交互开发到参与近期运动竞赛(如马拉松、RoboCup等),各种技术突破层出不穷。
然而,随着人形机器人逐步走向产业化,其底层控制系统的需求也日益复杂,特别是在需要支持多自由度关节、实时反馈与分布式架构的情况下,如何选择一款高效、稳定的底层通信协议成为至关重要的课题。
在这一过程中,EtherCAT(Ethernet for Control Automation Technology)凭借其高实时性和灵活的拓扑结构,成为构建人形机器人运动控制系统的理想选择。
目前EtherCAT在人形机器人领域的应用还在探索阶段,然而,其在工业机器人中的广泛应用,已充分证明了其在多轴同步、实时数据传输和大规模节点协同方面的巨大优势。作为EtherCAT技术栈的重要推动者,acontis的产品为开发者提供了完备的支持,助力机器人控制系统的优化与创新。
一、EtherCAT技术概述与核心优势
EtherCAT是一种基于以太网的实时工业通信协议,旨在满足高速、高同步和多节点控制的需求。与传统的以太网通信协议不同,EtherCAT采用了独特的数据帧传输方式,能在短时间内完成多个节点间的实时数据交换,显著提升系统的效率和响应速度。
核心优势:
-微秒级实时性
数据处理主要通过在硬件层面完成,降低了传输延迟。对于需要高频率和高精度控制的系统,EtherCAT能提供微秒级实时的响应能力。
-分布式时钟同步
EtherCAT的分布式时钟技术能够确保各个节点的时间同步精度可达到亚微秒级,适合需要多轴协调控制的应用场景。
-灵活的拓扑结构
EtherCAT支持多种网络拓扑结构,包括线型、星型、树型等。这使得它能够适应各种复杂的机器人系统,尤其是在分布式控制器部署上具备高度灵活性。
-高带宽与低开销
数据帧传输一次即可覆盖所有节点,避免了传统协议中的数据重复传输,大幅提升了带宽利用率,并降低了网络负担。
-支持上百节点
EtherCAT支持数百个从站设备连接,能够满足人形机器人中多自由度关节和大量传感器的需求。
这些特性使EtherCAT在工业自动化、机器人控制、医疗设备等领域广泛应用,也为人形机器人提供了坚实的通信基础。
二、EtherCAT技术落地与高效验证工具
作为EtherCAT主站协议栈的领先提供商,acontis推出的高性能协议栈EC-Master以及易用的开发工具EC-Engineer。
这些工具不仅广泛应用于工业自动化领域,在机器人系统中同样具有显著优势。在机器人系统通信中,acontis的EtherCAT协议栈能够高效支持从多自由度关节的同步控制到传感器数据反馈的实时处理,确保机器人能够进行高精度、低延迟的控制。
核心组件:
-EC-Master协议栈
作为acontis的核心产品,EC-Master提供了高度优化的EtherCAT主站协议栈,支持Windows、Linux RT、QNX、VxWorks等多个操作系统平台。无论是在嵌入式控制器上,还是在工业PC上,EC-Master都能高效运行,满足各种控制精度要求。
-EC-Engineer调试工具
EC-Engineer是一款图形化调试与配置工具,支持从站扫描、PDO映射、诊断分析等功能。通过简化配置和调试过程,帮助开发者提高开发效率。
-实时扩展支持
在标准Windows环境下,acontis提供了成熟的实时扩展方案来实现精确的周期调度,确保控制任务能够按时执行,满足高精度控制的需求。
-仿真与诊断接口
为了帮助开发者快速验证系统的稳定性,acontis推出了支持虚拟从站、拓扑导入和在线诊断等功能的可视化产品,使得开发者能够在无硬件环境下进行仿真测试,并实时监控系统性能。
三、人形机器人中的运动控制需求与EtherCAT的适配性讨论
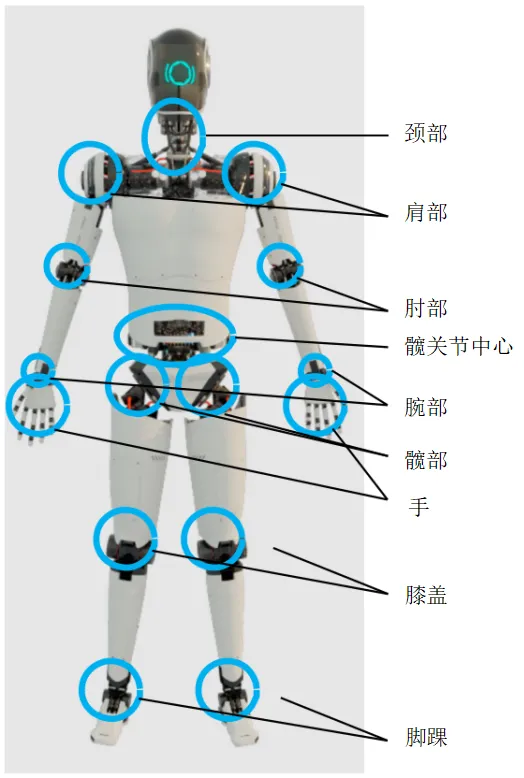
人形机器人控制系统的复杂性远超传统的机械臂,其步态规划、力控反馈和实时姿态调整等任务对精度与同步性要求极高。为应对此类挑战,EtherCAT凭借其高同步性、低延迟和高带宽特性,正可满足其需求。
典型任务:
-步态规划与多关节插补
需要协调多个关节同时运动,要求极高的同步精度。EtherCAT的分布式时钟同步机制能够确保各个关节在步态变化过程中保持精确的同步,从而避免运动中的不协调性。
-力控反馈与传感器融合
在人形机器人中,触觉、视觉、惯性传感器等实时数据的采集与反馈至关重要。EtherCAT的低延迟传输特性,确保了实时数据处理和反馈控制,极大提升了机器人的交互精度和反应速度。
-实时姿态调整与环境响应
机器人需要根据外部环境的变化迅速调整姿势,EtherCAT的高带宽和实时性使得机器人能够在最短时间内作出反应,确保运动的准确性和稳定性。
四、运动控制库(EC-Motion)介绍:从协议到执行的桥梁
在EtherCAT网络中,运动控制的实现不仅依赖于硬件协议栈,还依赖于控制逻辑的良好配合。acontis提供了一套完整的运动控制接口,能够帮助开发者高效实现机器人控制任务。

核心功能:
-CoE协议支持
通过CoE(CANopen over EtherCAT)协议,EC-Motion实现了SDO/PDO数据交换,从而方便开发者进行参数配置和实时数据传输。
-与第三方控制库集成
EC-Motion支持与ROS、TwinCAT、自研控制器等运动控制系统的集成,帮助开发者在EtherCAT的基础上实现更高层次的运动规划与执行。
-模块化设计
acontis的协议栈采用模块化设计,主站初始化、从站配置和周期任务调度等功能被清晰分离,而运动控制库EC-Motion也可以作为扩展一同成为落地方案的一部分,便于维护和扩展,减少了开发者的工作量。
-调试与诊断工具
提供在线监控、错误分析和性能评估功能,帮助开发者实时检查系统状态,确保运动控制任务能够顺利完成。
五、FAQ:常见问题解答
-EtherCAT 拓扑结构是否支持机器人?
- 支持,EtherCAT 支持线型、树型、星型等多种拓扑结构,尤其适合分布式机器人控制器的部署。
-EtherCAT 是否能够支持稳定传输?
- 由于其高带宽、低延迟和强实时性的特性,EtherCAT 非常适合进行高频率的数据传输与实时反馈控制。
-acontis是否支持在Windows环境下开发EtherCAT主站的方案?
- 支持,acontis提供在 Windows 环境下运行EtherCAT的解决方案,帮助开发者通过实时扩展方案实现Windows环境下的部署与开发。
-人形机器人技术前景如何?
- 随着 AI、传感器与控制系统的发展,人形机器人正逐步从实验室走向产业化。底层控制系统的稳定性和扩展性将成为其核心竞争力之一。
结语:从底层通信看人形机器人未来
随着人形机器人技术的不断成熟,底层控制系统的选择对其性能和可靠性起着决定性作用。EtherCAT作为一种高效、实时的通信协议,凭借其天然的优势,正成为越来越多开发者的首选。acontis提供的技术栈不仅为EtherCAT的应用提供了坚实的基础,还为开发者提供了一个灵活、可扩展且易于调试的解决方案。
展望未来,随着人形机器人在智能制造与人机交互中的应用日益广泛,EtherCAT将在这一领域发挥越来越重要的作用,助力机器人方案的多样化推进与经验扩展。
-
机器人
+关注
关注
213文章
30612浏览量
219671 -
工业自动化
+关注
关注
17文章
3009浏览量
69347 -
ethercat
+关注
关注
19文章
1377浏览量
43451
发布评论请先 登录
人形机器人“造车”,车企扎堆布局!

国民技术亮相2025人形机器人国际峰会

深度解读人形机器人电感产品需求及应用选型技巧
共绘具身智能未来,ADI携手产业伙伴举行人形机器人媒体分享会

最新发布!泰科机器人发布首款自研双足人形机器人

工业人形机器人价格区间:赋能智能制造的新选择

蓝思科技:今年承接智元机器人全系列多款人形机器人业务
NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI

马拉松赛场“掉链子”?解锁人形机器人通信稳定秘籍!

EtherCAT科普系列(4):EtherCAT技术在人形机器人灵巧手领域应用

从技术到市场,致远电子EtherCAT通讯卡如何推动人形机器人前行?





 工商网监
工商网监
评论